平面桁架位移法求解程序设计修正版
- 格式:doc
- 大小:385.50 KB
- 文档页数:22
平面桁架杆件内力的虚位移原理求解平面桁架杆件内力的虚位移原理求解平面桁架杆件内力的虚位移法就是通过对一个平面桁架杆件分别在不同的横截面处作轴力作用,从而求出在相互之间的杆件的虚位移及节点内部力,以此作为最终求解这个结构内力的手段。
该原理具有可操作性好、局部支座独立性强、保守性好等特点,是解决桁架杆件内力不确定性和复杂性的有效方法。
具体步骤如下:一、选取横截面在选取横截面时,首先确定受力过程,即在该结构中确定各结构件的受力情况或作用力方向。
根据力学原理,如果在任意结构单元面上作当量的力和力矩都是等价的,那么就可以合理的在该杆件的横截面上选取合理的横截面去分析这一结构横截面单元的内力。
二、确定虚力系数接下来,我们需要根据上一步确定的受力情况,确定每一横截面上的虚力系数。
虚力系数是根据横截面单元元素的面积、材料的刚度等诸多因素而确定的。
虚力系数的计算公式是:Q=m*b/d,其中m为横截面单元的面积,b和d为杆件的刚度,以及杆件的厚度。
三、计算横截面的虚力根据已经确定的虚力系数,就可以求出每一横截面单元上的虚力,即就可以由横截面上的受力确定每一单元上的虚力值。
四、求解节点上的抗力根据虚位移原理及上面确定的横截面单元虚力,就可以求出这个桁架杆件上每个节点处的抗力。
该原理指出:节点处的抗力可以由所有横截面单元虚力的总和相加得到,即按下式求解:F1=Q1-Q2+Q3-Q4,其中Q1指的是横截面1上的虚力,Q2指的是横截面2上的虚力,以此类推。
五、求解内力最后,根据以上分析,就可以求出该平面桁架杆件上每个节点处的抗力,从而求出这个结构的主/副矩,悬臂梁杆件的弯矩、压弯构件的压力矩、支座上反力等内力。
通过分析可以看出,平面桁架杆件内力的虚位移法是解决桁架结构内力问题的有效方法,具有可操作性好、局部支座独立性强、保守性好等特点,在实际工程中得到广泛应用。
桁架内力计算程序(TRUSS)一、程序功能及编制方法桁架内力计算程序(TRUSS),能计算任意平面和空间桁架(包括网架)在结点荷载作用下各结点的位移和各杆的轴力。
程序采用变带宽一维数组存储总刚度矩阵,先处理法引进支座条件。
计算结果输出各结点的位移和各杆的轴力。
二、程序使用方法使用方法与“APF”程序相同。
用文件编辑编辑器建立数据文件后即可运行。
计算结果将写在结果文件中。
三、数据文件填写格式数据文件填写格式大致与APF程序相似。
1.总信息:T,NJ,NE,NR,NB,NP,EO,DS其中:T——桁架类型,平面桁架 T=2,空间桁架 T=3。
NR——支座约束数。
其他变量与APF程序相同。
2.结点坐标数组XYZ(NJ, 3)每个结点填一行,每行三个数分别填写结点的x,y,z三个坐标数值,平面桁架只填x,y 值(单位:m)。
3.单元信息数组G(NE)采用紧缩存储方式,每个单元填一个数。
把单元的左端、右端结点号和杆的类型号三个数紧缩为一个数。
例如某单元左端结点号为15,在端结点号为8,类型号为3,则写成0.15083,一般格式为0.×××××。
4.单元截面信息数组AI(NB)填写各类单元的杆截面面积(m2)。
5.约束信息数组R(NR)采用紧缩存储方式,每个约束(支座链杆)填一个数。
把约束作用的作用点写在该数的整数部分,约束的方向写在小数部分。
x方向的约束为“l”,y方向的约束为“2”。
例如某支座链杆作用在 17号结点上,方向沿整体坐标 y方向,则写为 17.2,一般格式为××.×。
6.结点荷载信息数组F(NP,2)每个结点荷载填一行,每行两个数。
前一个数用紧缩方式填写荷载作用的结点号和作用方向,格式与约束信息的格式相同。
后一个数为荷载的数值。
单位为kN,与整体坐标方向一致者为正值,相反者为负值。
例如,作用在16号结点上,数值为183.5 kN,方向向下的力,则写成:16.2,-183.5(这里,假定坐标轴y轴向上)。
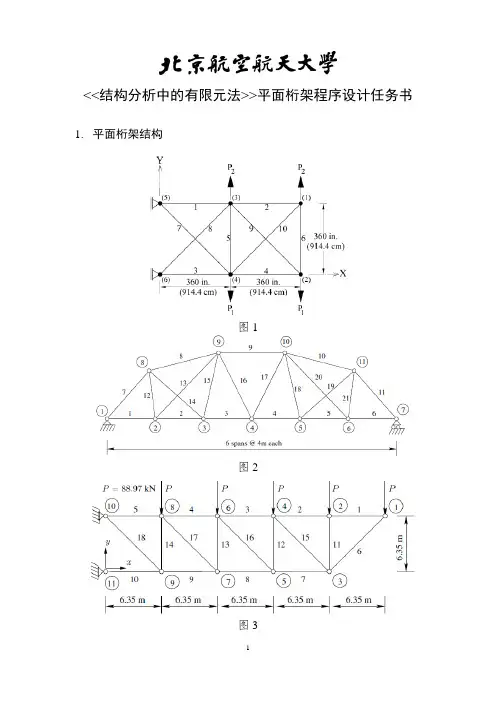
<<结构分析中的有限元法>>平面桁架程序设计任务书1.平面桁架结构
图1
图2
图3
基于平面桁架静力有限元分析理论自行编写平面桁架有限元分析程序,并利用自编程序对图1、图2和图3所示三个平面桁架结构形式进行变形和应力分析,其中结构材料、结构尺寸和外载荷可自行设定。
2.程序编写和报告撰写要求
(1)编制的程序要求具有一定的“通用性”,通过“输入文件”形式读
入具体分析结构的结点个数、结点坐标、单元个数、单元结点信息、单元材料信息、单元刚度和结点外载荷信息等,从而实现程序的通用性;
(2)提交形式:程序和计算分析报告电子版发至邮箱:
xjwang@),程序和计算分析报告打印版一份;
(3)提交时间:2015年5月28日前。
平面桁架杆件内力的虚位移原理求解平面桁架是由若干个杆件和连接节点组成的结构系统。
在静力学中,我们需要确定杆件的内力分布,以便分析框架结构的稳定性和强度。
在这个过程中,虚位移原理是一种常用的求解方法。
虚位移原理是基于杆件内力是虚功平衡的原理。
根据虚功原理,任意一种变形状态下,根据外力做的虚功与内力做的虚功之和等于零。
在平面桁架中,变形可以由杆件的伸缩变形和节点的转动变形来描述。
假设在特定的荷载条件下,各杆件的长度变化为ΔL,各节点转动角为Δθ。
那么我们可以将每个杆件的内力分解为水平分力、垂直分力和弯矩。
根据虚功原理,我们可以得到以下方程:∑(F_x*ΔL+M*Δθ)=0∑(F_y*ΔL)=0这里,F_x和F_y表示水平和垂直分力,M表示弯矩。
上述两个方程是根据平衡条件得到的。
在求解过程中,通常将虚移位分解为水平和垂直方向的分量,即:ΔL_x=∂u/∂x*Δx+∂u/∂y*ΔyΔL_y=∂v/∂x*Δx+∂v/∂y*Δy其中u和v是位移函数,表示节点的水平和垂直位移,Δx和Δy是节点在x和y方向的位移增量。
通过将虚位移代入虚功方程,我们可以得到:∑(F_x*∆L_x+F_y*∆L_y+M*∆θ)=0这个方程称为平面桁架杆件内力求解的虚功原理方程。
通过这个方程,我们可以求解每个杆件的内力。
具体的求解过程可以分为以下几步:1.根据给定的初始条件,假设节点的位移增量Δx、Δy和Θ;2.对于每个节点,根据虚功方程计算杆件的水平力、垂直力和弯矩;3.根据每个杆件的几何特性和材料属性,计算杆件的伸缩变形和转动变形;4.根据计算得到的杆件力和变形,更新节点的位移增量;5.重复步骤2-4,直到计算收敛,即内力和位移增量不再变化。
通过以上步骤,我们可以求解平面桁架杆件的内力分布。
总结起来,平面桁架杆件内力的虚位移原理求解主要是基于虚功原理。
通过将虚位移代入虚功方程,结合平衡条件和杆件的几何特性和材料性质,可以求解出每个杆件的内力。
桁架计算(TRUSS)桁架内⼒计算程序(TRUSS)⼀、程序功能及编制⽅法桁架内⼒计算程序(TRUSS),能计算任意平⾯和空间桁架(包括⽹架)在结点荷载作⽤下各结点的位移和各杆的轴⼒。
程序采⽤变带宽⼀维数组存储总刚度矩阵,先处理法引进⽀座条件。
计算结果输出各结点的位移和各杆的轴⼒。
⼆、程序使⽤⽅法使⽤⽅法与“APF”程序相同。
⽤⽂件编辑编辑器建⽴数据⽂件后即可运⾏。
计算结果将写在结果⽂件中。
三、数据⽂件填写格式数据⽂件填写格式⼤致与APF程序相似。
1.总信息:T,NJ,NE,NR,NB,NP,EO,DS其中:T——桁架类型,平⾯桁架 T=2,空间桁架 T=3。
NR——⽀座约束数。
其他变量与APF程序相同。
2.结点坐标数组XYZ(NJ, 3)每个结点填⼀⾏,每⾏三个数分别填写结点的x,y,z三个坐标数值,平⾯桁架只填x,y 值(单位:m)。
3.单元信息数组G(NE)采⽤紧缩存储⽅式,每个单元填⼀个数。
把单元的左端、右端结点号和杆的类型号三个数紧缩为⼀个数。
例如某单元左端结点号为15,在端结点号为8,类型号为3,则写成0.15083,⼀般格式为0.×××××。
4.单元截⾯信息数组AI(NB)填写各类单元的杆截⾯⾯积(m2)。
5.约束信息数组R(NR)采⽤紧缩存储⽅式,每个约束(⽀座链杆)填⼀个数。
把约束作⽤的作⽤点写在该数的整数部分,约束的⽅向写在⼩数部分。
x⽅向的约束为“l”,y⽅向的约束为“2”。
例如某⽀座链杆作⽤在 17号结点上,⽅向沿整体坐标 y⽅向,则写为 17.2,⼀般格式为××.×。
6.结点荷载信息数组F(NP,2)每个结点荷载填⼀⾏,每⾏两个数。
前⼀个数⽤紧缩⽅式填写荷载作⽤的结点号和作⽤⽅向,格式与约束信息的格式相同。
后⼀个数为荷载的数值。
单位为kN,与整体坐标⽅向⼀致者为正值,相反者为负值。
例如,作⽤在16号结点上,数值为183.5 kN,⽅向向下的⼒,则写成:16.2,-183.5(这⾥,假定坐标轴y轴向上)。
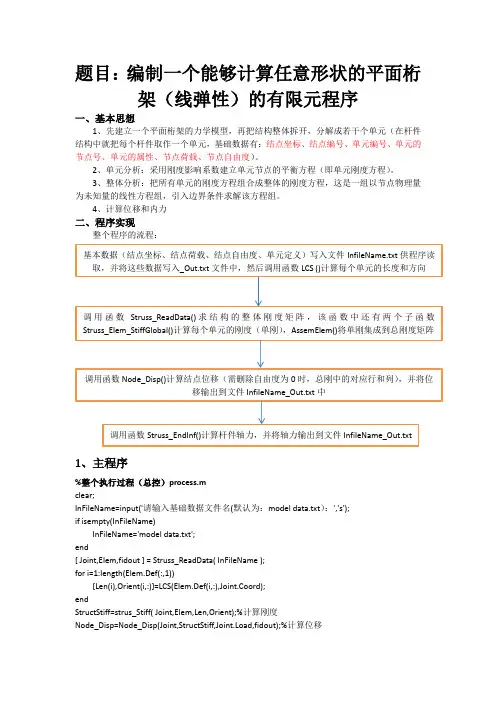
题目:编制一个能够计算任意形状的平面桁架(线弹性)的有限元程序一、基本思想1、先建立一个平面桁架的力学模型,再把结构整体拆开,分解成若干个单元(在杆件结构中就把每个杆件取作一个单元,基础数据有:结点坐标、结点编号、单元编号、单元的节点号、单元的属性、节点荷载、节点自由度)。
2、单元分析:采用刚度影响系数建立单元节点的平衡方程(即单元刚度方程)。
3、整体分析:把所有单元的刚度方程组合成整体的刚度方程,这是一组以节点物理量为未知量的线性方程组,引入边界条件求解该方程组。
4、计算位移和内力二、程序实现整个程序的流程:1、主程序%整个执行过程(总控)process.mclear;InFileName=input('请输入基础数据文件名(默认为:model data.txt):','s');ifisempty(InFileName)InFileName='model data.txt';end[ Joint,Elem,fidout ] = Struss_ReadData(InFileName );fori=1:length(Elem.Def(:,1))[Len(i),Orient(i,:)]=LCS(Elem.Def(i,:),Joint.Coord);endStructStiff=strus_Stiff( Joint,Elem,Len,Orient);%计算刚度Node_Disp=Node_Disp(Joint,StructStiff,Joint.Load,fidout);%计算位移[InFL,F]=Struss_EndInf(Elem,Len,Orient,Node_Disp,fidout);%计算内力****************************************************************************** function [ varargout ] = LCS( iDef,Coord,varargin )%该LCS函数计算单元的长度和位向(方向)%输入:iDef=单元杆端结点号% Coord=结点坐标x,y% TypeNo=varargin{1}表示输出类型的编号:输出单元长度1、输出单元位向2、输出单元长度及位向3%输出:Len{1}=单元长度% Orient{2}=单元位向%输入参数处理if length(varargin)==0TypeNo=3;elseif length(varargin)==1TypeNo=varargin{1};elseerror('调用函数LCS时,输入参数数目有误!')end%单元长度和位向计算xy1=Coord(iDef(2),:);xy2=Coord(iDef(3),:);dxy=xy2-xy1;Len=sqrt(sum(dxy.*dxy));ifTypeNo==1varargout{1}=Len;elseifTypeNo==2varargout{1}=[dxy(1)/Len,dxy(2)/Len];elseifTypeNo==3varargout{1}=Len;varargout{2}=[dxy(1)/Len,dxy(2)/Len];end2、从基础数据文件读取数据赋值给数组function [ Joint,Elem,fidout ] = Struss_ReadData( InfileName )%从基础数据文件读取数据赋值给数组%Joint=struct('NJoint',[],'NDOF',[],'Coord',[],'DOF',[],'Load',[]);Elem=struct('NElem',[],'Def',[]);fidout=0;%从基础数据文件读取数据[Joint,Elem,JointDef]=ReadData(Joint,Elem,InfileName);%整理输入数据[Joint,Elem,JointDef]=PackData(Joint,Elem,JointDef);%把基础数据写入输出文件[OutFileName,fidout]=WriteData(Joint,Elem,InfileName);end****************************************************************************** function [ Joint,Elem,JointDef ] = ReadData( Joint,Elem,InFileName )%从基础数据文件读取数据fidin=fopen(InFileName,'r');%以只读方式打开格式文件JointDef=[];%设置初值iffidin==-1error('没有这个基础数据文件');endwhile ~feof(fidin); %测试文件的结尾line=fgetl(fidin);%按行读取字符串line=deblank(line(end:-1:1));line(end:-1:1)=line;%去掉每行字符前的空格if~isempty(line)&~strncmp(line,'%',1)%排除空行和注释行%-----读取结点和单元数据KeyWord=strtok(line,',');%取第一个逗号“,”前的子串,即关键字dotsuffix=find(line==',');%提取逗号在字符串中的下标NumVec=str2num(line(dotsuffix(1)+1:end));%提取第一个逗号后的子串并数值化switchKeyWordcase 'Contl'Joint.NJoint=NumVec(1);Joint.NDOF=NumVec(2);Elem.NElem=NumVec(3); case 'Joint'JointDef=[JointDef;NumVec];case 'Elem'Elem.Def=[Elem.Def;NumVec];case'JointLoad'Joint.Load=[Joint.Load;NumVec];otherwiseerror('没有这种数据类型标识!')endendendfclose(fidin);%关闭文件****************************************************************************** function [ Joint,Elem,JointDef ] = PackData( Joint,Elem,JointDef )%整理输入数据% 整理结点坐标数据Joint.Coord=JointDef(:,2:3);%结点坐标Joint.DOF=JointDef(:,4:5);%结点自由度%整理单元数据if length(Elem.Def(1,:))==4Elem.Def(:,5)=1e-5;%设置线膨胀系数默认值end****************************************************************************** function [ OutFileName,fidout ] = WriteData( Joint,Elem,InfileName )%WriteData把基础数据写入输出文件%设置输出文件名,把‘.m'替换为’_Out.txt'OutFileName=strrep(InfileName,'.txt','_Out.txt');fidout=fopen(OutFileName,'wt');%以只写方式打开格式文件%基础数据输出到文件fprintf(fidout,'%s\n','%平面桁架静力分析数据');fprintf(fidout,'%s\n',['%输入数据文件:',InfileName]);fprintf(fidout,'\n');fprintf(fidout,'%s\n','%-----输入数据---------');fprintf(fidout,'%s\n','%控制数据');fprintf(fidout,'%s\n','%单元数结点数自由度数');fprintf(fidout,'%5d%10d%10d\n',Elem.NElem,Joint.NJoint,length(find(Joint.DOF)));fprintf(fidout,'\n');fprintf(fidout,'%s\n','%基础数据');fprintf(fidout,'%s\n','%结点坐标及自由度');fprintf(fidout,'%s\n','%结点号X Y DOF1 DOF2 ');fori=1:Joint.NJointfprintf(fidout,'%5d%9g%9g%9d%9d\n',i,Joint.Coord(i,:),Joint.DOF(i,:));endfprintf(fidout,'\n');fprintf(fidout,'%s\n','%单元编号、截面几何和材料常数');fprintf(fidout,'%s\n','%单元号始端号末端号轴向刚度线膨胀系数');fori=1:Elem.NElemfprintf(fidout,'%5d%10d%12g%15g%15g\n',Elem.Def(i,:));end%输出结点荷载fprintf(fidout,'\n');fprintf(fidout,'%s\n','%结点荷载');if ~isempty(Joint.Load)fprintf(fidout,'%s\n','%结点号方向荷载值');[r,v]=size(Joint.Load);fori=1:rfor j=1:vfprintf(fidout,'%d\t',Joint.Load(i,j));endfprintf(fidout,'\n ');endelsefprintf(fidout,'%s\n','%--------无结点荷载');end end3、单元分析求出单元在整体坐标系中的刚度矩阵(这里直接求整体坐标下的刚度矩阵还是比较方便的,不需要先求单元坐标下的矩阵,再转换成整体坐标下的)。
主题:计算静定平面桁架内力的两种基本方法随着现代建筑工程的发展,计算静定平面桁架内力成为了结构分析中的重要问题。
在计算静定平面桁架内力时,有两种基本的方法,即力法和位移法。
本文将分别介绍这两种方法的基本原理和应用,以及它们的优缺点。
一、力法1. 基本原理力法是通过平衡节点上的受力来计算静定平面桁架内力的一种方法。
在力法中,首先要对整个桁架进行受力分析,确定各个节点上的受力情况,然后根据节点受力的平衡条件,计算出每根构件的内力。
2. 应用力法广泛应用于静定平面桁架内力的计算中。
通过力法可以清晰地了解每根构件受力的情况,对于设计师来说具有很大的实用价值。
3. 优缺点优点:力法计算简单、直观,适用于多种不同类型的静定平面桁架。
缺点:力法在计算过程中需要考虑节点受力平衡的条件,当桁架节点较多时,计算过程较为繁琐,且容易出错。
二、位移法1. 基本原理位移法是通过分析节点的位移来计算静定平面桁架内力的一种方法。
在位移法中,首先需要假设桁架中的某个节点发生位移,然后根据位移引起的构件变形情况,计算出每根构件的内力。
2. 应用位移法在计算静定平面桁架内力时具有一定的优势,特别是在复杂结构的分析中,位移法可以更加直观地反映构件的变形情况,对于设计师来说具有较大的帮助。
3. 优缺点优点:位移法对于复杂结构的分析更加直观,能够清晰地揭示构件的内力分布情况。
缺点:位移法在计算过程中需要假设节点发生位移,这种假设可能与实际情况不符,导致计算结果存在一定误差。
三、综合比较1. 适用范围力法和位移法各有其适用范围,力法适用于简单桁架的受力分析,而位移法适用于复杂结构的受力分析。
2. 精度和准确性在计算静定平面桁架内力时,力法的结果相对准确,而位移法的结果受到假设位移的影响,精度较低。
3. 计算复杂度力法在计算过程中相对简单直观,适用于简单结构的分析;而位移法在复杂结构的分析中可以更加直观地反映构件的变形情况。
四、结论力法和位移法是计算静定平面桁架内力的两种基本方法,各自具有自身的优势和不足。
第45卷第8期 山 西建筑 V 〇1.45N〇.82 0 1 9 牟 3 月 S H A N X I A R C H I T E C T U R E Mar. 2019• 45 •文章编号:1009-6825 (2019) 08-0045-02平面桁架内力与位移分析陈凌阳杨杰(大连海洋大学海洋与土木工程学院,辽宁大连11023)摘要:桁架内力与位移计算是结构设计与校核的基础工作,在理论力学和结构力学中都给出了理论计算的基本方法。
分别采用 理论分析,数值模拟与实验测量,分析了桁架内力与位移的情况,验证了理想桁架结构模型有效性,加深了对工程结构力学模型合 理性的认识,提高解决具体工程问题的分析能力。
关键词:平面桁架,内力,位移,实验测量,ANSYS 中图分类号:T U 375.5工程实际中的桥梁、屋架、电视塔和起重机架等结构,在连接 处通常采用焊接、铆接、螺栓连接等多种方式,这类结构进行内力 分析时,由于是在节点处加载,常将其作为理想桁架处理,各杆件 只承受轴向拉压,所有节点处均为铰链接。
对于理想化桁架结 构,可采用理论力学中节点法或截面法对各杆的内力进行计算。
本文针对铆接连接方式下的桁架结构,通过实验方法测量了 各杆件的内力值,并与理想桁架内力的理论计算及数值模拟结果 进行对比,加深对工程结构力学建模合理性的认识。
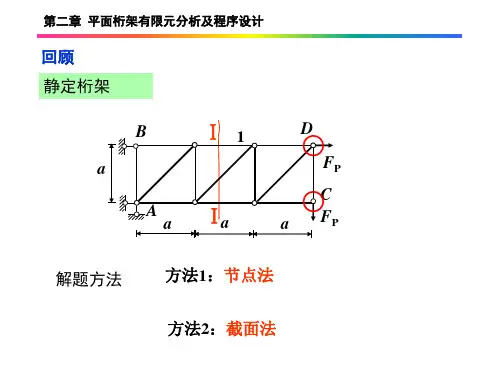
1静定平面桁架分析方法本文以图1所示静定平面桁架结构为例,分别采用理论计算,数值分析,实验测量的方法分析结构中①〜⑨杆件的内力以 及节点D 的位移,进而分析不同方法的差异性。
平面桁架结构如图1所示,包括1根杆件,10个节点,节点 处为铆接,材料弹性模量瓦=2. 06e 11 Pa,泊松比M = 0. 3,在跨中 H 点处施加集中荷载(力的大小分别为0.8 k N ,1.6 k N ,2.4 k N ,3.2 k N ,4.0 k N ,4.8 k N )。
2 1004) 建造施工阶段:B I M 技术可以快速精确定位构件,实现高质量安装。
平面桁架杆件内力的虚位移原理求解薛艳霞;苏振超【期刊名称】《力学与实践》【年(卷),期】2017(039)006【总页数】2页(P627-628)【作者】薛艳霞;苏振超【作者单位】厦门大学嘉庚学院土木工程系,福建漳州 363105;厦门大学嘉庚学院土木工程系,福建漳州 363105【正文语种】中文如图1所示平面桁架承受载荷FP作用,试用虚位移原理计算杆件AK的内力.将ACED,ABJK和EHGI分别视为一个刚片,由于刚片ACED与刚片ABJK铰接于A,刚片ACED与刚片EHGI铰接于E,而刚片ABJK与刚片EHGI通过两根平行链杆JG,KH铰接于水平方向的∞点,根据三刚片组成规则可知体系为无多余约束的几何不变体系,也就是图1所示的结构体系为静定结构.为了利用虚位移原理求解杆件AK的内力,将其解除并代之以两个等值反向的力F1和F′1,如图2所示.由于原体系是几何不变、无多余约束的体系,故解除杆件AK后,结构就成为自由度为1的机构.在该机构中,B点的虚位移为水平方向,但刚片ACED因为约束不能移动,而刚片EHGI则可运动.由于 E点不动,故刚片EHGI只能绕 E轴转动,从而可以确定H,G两点的虚位移的方向分别垂直于这两点与E点的连线.如果假定EHGI绕E轴有一个虚转角δθ,则H,G两点虚位移的大小即可确定.从而由虚位移投影定理可分别求得K,J两点的虚位移在水平方向投影的大小.但对于可视为刚片的BJK,只知道K,J两点的虚位移在水平方向的投影及B 点虚位移为水平方向,按照常见的已知结论还无法直接计算出K点的虚位移.故需要先求出K点的虚位移,进而才能计算出力F1在K点虚位移上的投影,方可利用虚位移原理求解杆件AK的内力.为了计算K点的虚位移,可通过类似于运动学中速度合成定理的虚位移合成定理(参见:苏振超主编《理论力学》第149页,大连理工大学出版社,2014.11),可得:δrK= δrB+ δrKB 以及δrKB=rBK ×δθ,即:δrK= δrB+rBK ×δθ,其中δθ 为刚片BJK 的虚转角矢。
平面桁架利用卡氏定理求位移-MAPLE程序设计学院:土木工程与建筑学院班级:工程力学1001指导老师:赵明波成员:20103804沈立20103808唐显鹏西南科技大学2013年5月20日目录摘要 (3)第1章题目的意义 (4)第2章理论分析 (4)1.卡式定理求位移基本概念 (4)2.平面桁架问题分析,求位移理论 (5)第3章程序设计框图 (6)第4章程序代码 (7)第5章应用 (11)1. 例1 (11)2. 例2 (13)3.例3 (15)第6章结论 (17)参考文献 (18)摘要本文在深入理解有限元位移法的基础上,利用MAPLE编程来编写平面桁架用卡氏定理求位移的通用程序。
该通用程序能够根据给定的桁架计算模型,通过MAPLE输入外加荷载和虚拟荷载,计算出平面桁架指定点的位移。
关键字:MAPLE 平面桁架位移计算程序设计第 1 章题目意义在现实生活中,平面桁架随处可见。
例如桥梁、屋架、电视塔和起重机架等,所以平面桁架的位移计算就显得特别重要。
我们利用MAPLE程序对任意平面桁架的位移问题分析计算,确定其是否能够继续工作。
第 2 章理论分析1.卡式定理求位移基本概念将结构的应变能表为荷载F,2F,3F.......n F的函数,则应变能对任一1荷载F的偏导数等于i F作用点沿i F方向的位移i ,这便是卡氏定理。
因为大量i实践表明:一般情况下桁架中主应力的主应力占总应力的80%以上,所以主应力的确定是桁架中应力的主要部分。
即是桁架的内力主要是轴力,所以附加弯矩的影响是次要的,所以在计算时一般只考虑杆件轴力。
所以对于平面桁架位移的求解方法即为先求出每根杆件的轴力,然后求出应变能,最后求出指定点位移。
2.平面桁架问题分析,求位移理论①假设平面桁架有N根杆件,先对杆件进行编号。
在指定点施加一个虚拟力SWU ,计算出在外加荷载和SWU 共同作用下杆件轴力1n F , 2n F ,3n F .. . . . . nn F ;得出杆件轴力矩阵PP=[1n F , 2n F , 3n F . . . . . . nn F ] 杆件长度矩阵=[1l , 2l , 3l . . . . . . n l ] 杆件刚度矩阵=[1A ,2A ,3A . . . . . . n A ]②因为杆件计算时只考虑轴力,所以杆件的应变能只有轴力作用,L F V ∆=21ε,又因为在弹性范围内EAFlL =∆,所以杆件的应变能的应变能公式EAl F V 22=ε。
目录摘要 ............................................................................ - 3 -第一章题目的意义...................................................... - 4 -第二章理论分析......................................................... - 4 -2.1位移法的基本概念.. (4)2.2平面桁架分析的基本问题 (7)第三章程序设计框图..................................................- 12 -第四章程序代码........................................................- 13 -4.1计算平面桁架位移法的程序代码 .. (13)第五章应用..............................................................- 16 -5.1例一 .. (16)5.2例二 (19)第六章结论······························································- 22 -参考文献 ·····································································- 22 -平面桁架位移法计算的MAPLE程序设计摘要本文利用位移法编写MAPLE程序来计算平面桁架各节点位移、各杆的轴力。
通过虚设位移和约束处的位移处理,由位移表示出杆件轴力,把杆件轴力和支反力转化为节点力,建立节点力的平衡方程,根据线性代数知识求解多元一次方程组,求解出杆件内力。
所以,通过MAPLE输入特征矩阵和约束条件,采用后处理方法编写MAPLE程序代码计算出平面桁架各节点位移、约束处的支反力和各杆件内力。
本文通过2个计算实例表明其计算结果较为理想。
关键词:平面桁架;位移法;MAPLE;程序设计平面桁架位移法的MAPLE程序设计第一章题目的意义平面桁架在我们的生活中到处可见,房屋、桥梁、电视塔等等都可以发现,因而平面桁架的求解变得尤为重要。
在以往我们学过的力学知识中,我们发现平面桁架求解是相当复杂的,运算量比较的大,然而我们利用的平面桁架位移法的MAPLE程序设计则大大降低了运算量,也极大的提高了运算精度。
第二章理论分析2.1位移法的基本概念位移法是计算超静定结构的另一种基本的、也是有效的方法,不仅如此,对于静定结构,位移法也是一种计算方法。
力法从未知力/缀余力入手,力法的基本原理,是对于超静定结构中任意两点的相对变形都是0,也就说所有的力在该位置上产生的变形之和为0,因此力法可以称之为位移协调法。
位移法与之相对应,即对于处于平衡状态下的结构体系来讲,结构中的任意一点或任意组成部分也是处于平衡状态的,因此该点或部分必然存在内力的平衡,以内力平衡为基础所构建的线性方程组来求解结构内力,也是一种极佳的方法。
因为结构的内力与变形之间存在着必然的、确定的联系,因此结构的内力平衡一般从位移为未知量来入手,最终求得结构内力。
这种以位移为初始未知数求解结构内力的方法称为位移法。
位移法的基本原理,是以在小变形的基础的结构体系中,内力是可以叠加的,位移也是可以叠加的。
结构中的受力、变形是可以分阶段、分次发生的,分阶段、分次发生的受力、变形是可以线性叠加的,叠加的结果与这些力、变形同时发生的结构所产生的内力、变形是相同的。
位移法可按两种思路求解结点位移和杆端弯矩:典型方程法和平衡方程法。
下面给出典型方程法的解题思路和解题步骤。
1、截面直杆的转角位移方程各种因素共同作用下杆端弯矩的表达式称为转角位移方程。
①两端固定梁转角位移方程:②一端固定一端铰支梁转角位移方程:③ 一端固定一端定向支承梁转角位移方程:④已知杆端弯矩,可由杆件的矩平衡方程求出剪力:其中是相应的简支梁在荷载作用下的杆端剪力;M AB,M BA的正负按位移法规定。
2、直接列平衡方程法:位移法方程实质上是静力平衡方程。
对于结点角位移,相应的是结点的力矩平衡方程;对于结点线位移,相应的是截面的投影平衡方程。
用基本体系方法计算时,是借助于基本体系这个工具,以达到分步、分项写出平衡方程的目的。
也可以不用基本体系,直接由转角位移方程,写出各杆件的杆端力表达式,在有结点角位移处,建立结点的力矩平衡方程;在有结点线位移处,建立截面的投影平衡方程。
这些方程也就是位移法的基本方程。
正负号的规定结点转角、杆转角、杆端弯矩和剪力一律以顺时针为正。
其中:形常数(刚度系数)2.2 平面桁架分析的基本问题要解决平面桁架问题,首先,要了解平面桁架的基本假设:1.各杆件都用光滑铰链链接。
2.各杆件都是直的,其轴线位于同一平面内,且通过铰链的中心。
3.荷载与支座的约束反力都作用在节点上且位于轴线的平面内。
4.各杆件的自重或略去不计,或平均分配到杆件两端的节点上。
桁架中各杆件都是二力杆,杆件的内力都是轴力。
其次,在平面桁架分析的基本问题中,我们利用理论力学进行分析的方法一般有:1.节点法:假想地截取平衡桁架的一部分为分离体,若分离体只包含一个节点,称为节点法。
节点处的平衡力系为平面汇交力系。
2.截面法:若分离体包含两个以上的节点,称为截面法,为平面任意力系的平衡。
3.节点法和截面法的混合应用。
用结构力学进行分析的方法有:1.节点法:假想地截取平衡桁架的一部分为分离体,若分离体只包含一个节点,称为节点法。
节点处的平衡力系为平面汇交力系。
2.截面法:若分离体包含两个以上的节点,称为截面法,为平面任意力系的平衡。
3.节点法和截面法的混合应用。
用结构力学进行分析的方法有:1.力法:是以多余未知力为基本未知量,基本未知量的数目等于结构的超静定次数。
2.位移法:是以独立的结点位移(结点角位移与独立结点线位移)为基本未知量,基本未知量的数目与超静定的次数无关。
关于位移法的简例(《结构力学Ⅰ》【第二版】包世华p274)先举一个简单的桁架例子,以便于具体地了解位移法的基本思路。
图7-1a 为一个对称结构,承受对称荷载Fp 。
结点B 只发生竖向位移⊿,水平位移为零。
在位移法中,把此竖向位移⊿选作基本未知量。
这是因为:如果能设法把位移⊿求出,那么各杆的伸长变形即可求出,从而各杆的内力就可求出,整个问题也就迎刃而解了。
由此看出,位移⊿确是一个关键的未知量。
现在进一步讨论如何求基本未知量⊿的问题。
计算分为两步: 第一步,从结构中选取一个杆件进行分析。
图7-2a 中杆AB ,如已知杆端B 沿杆轴向的位移u i (即杆的伸长),则杆端力F Ni 应为 i i i Ni u l EA F (7-1) 式中E 、A i 、l i 分别为杆件的弹性模量、截面面积和长度。
系数EA i / l i 是使杆端产生单位位移时所需施加的杆端力,称为杆件的刚度系数。
式(7-1)表明杆件的杆端力F Ni 与杆端位移u i 之间的关系,称为杆件的刚度方程。
图 7 - 1 图 7 - 2第二步,把各杆件综合成结构。
综合时各杆在B 端的位移是相同的,即都由B 改变到B ’,此为变形协调条件,各杆端位移u i 与基本未知量⊿间的关系为(图7-2b )i i a u sin ∆= (a ) 再考虑结点B 的平衡条件∑Fy=0,得(图7-1b )∑==51sin i p i N F a F(b )其中各杆的轴力FNi 可由(7-1)表示,再利用式(a )可用基本未知量⊿表示,代入式(b ),既得p i i ii F a l EA =∆∑=251sin (c ) 这就是位移法的基本方程,它代表平衡方程,是用位移表示的平衡方程。
由此可求出基本未知量⊿= ∑=512sin i i ai ipl EA F (d )至此,完成了位移法计算中的关键一步。
基本未知量⊿求出以后,其余为题就迎刃而解了。
例如,为了求各杆的轴力,可将式(d )代入(a ),再代入式(7-1),可得i i i i i i i i a l EA a l EA FN 251sin sin ∑== (e) 将图7-1a 的尺寸代入式(d )和(e ),设各杆EA 相同,得 EAa F p 637.0=∆ F N1=F N5=0.159F pF N2=F N4=0.255F pF N3=0.319F p在图7-1a 中,如只有2根杆,结构是静定的;当杆数大于(或等于)3时,结构是超静定的,均可用上述方法计算。
可见,用位移法计算时,计算方法并不因结构的静定或超静定而有所不同。
第三章程序设计框图第四章程序代码4.1 计算平面桁架位移法的程序代码>restart:with(linalg):with(plots):printlevel:=0:interface( showassumed=0):Warning, the protected names norm and trace have been redefined and unprotectedWarning, the name changecoords has been redefined>XY:=matrix([[0,0],[1.5,0],[2.25,0],[3,0],[4.5,0],[3,-0.5 ],[1.5,-0.5]]):>NE:=matrix([[1,2,E,A],[2,3,E,A],[3,4,E,A],[4,5,E,A],[5,6 ,E,A],[4,6,E,A],[3,6,E,A],[6,7,E,A],[3,7,E,A],[2,7,E,A],[ 1,7,E,A]]):>NP:=matrix([[1,2,-8],[2,2,-8],[3,2,-6],[4,2,-8],[5,2,-8] ]):> NC:=matrix([[1,1],[1,2],[5,2]]):初始数据的处理>truss:=proc()平面桁架位移法求解子程序global XY,NE,NP,NC:localx1,y1,x2,y2,L,cosa,sina,k1,T1,T2,T,ss,a,f,solu,k,i,j,uv,p p,ff,nf:uv:=matrix(rowdim(XY)*2,1,0):pp:=matrix(rowdim(XY)*2,1,0) :ff:=matrix(rowdim(NE),1,0):nf:=matrix(rowdim(XY)*2,1,0): ht:=(XY,NE)->display(plot([seq([XY[i,1],XY[i,2]],i=1..row dim(XY))],style=point,color=red,symbol=circle,symbolsize= 30),plot([seq([[XY[NE[i,1],1],XY[NE[i,1],2]],[XY[NE[i,2], 1],XY[NE[i,2],2]]],i=1..rowdim(NE))],color=blue,thickness =2),textplot([seq([XY[i,1],XY[i,2],i],i=1..rowdim(XY))],c olor=red),axes=none):绘图程序代码for k from 1 to rowdim(XY) do;虚设位移uv[2*k-1,1]:=u[k];uv[2*k,1]:=v[k];od;for k from 1 to rowdim(NC) do;约束处的位移处理i:=NC[k,1]: j:=NC[k,2]:uv[2*i-2+j,1]:=0:od;for k from 1 to rowdim(NE) do; 有虚设位移求杆件内力i:=NE[k,1]: j:=NE[k,2]:x1:=XY[i,1]: y1:=XY[i,2]:x2:=XY[j,1]: y2:=XY[j,2]:L:=sqrt((x2-x1)**2+(y2-y1)**2):cosa:=(x2-x1)/L :sina:=(y2-y1)/L:k1:=NE[k,3]*NE[k,4]/L:T1:=cosa*k1: T2:=sina*k1:T:=matrix([[-T1,-T2,T1,T2]]);ss:=matrix([[uv[2*i-1,1]],[uv[2*i,1]],[uv[2*j-1,1]],[uv[2 *j,1]]]);ff[k,1]:=det(simplify(multiply(T,ss))):od;for k from 1 to rowdim(NE) do;把轴力化为节点力i:=NE[k,1]: j:=NE[k,2]:x1:=XY[i,1]: y1:=XY[i,2]:x2:=XY[j,1]: y2:=XY[j,2]:L:=sqrt((x2-x1)**2+(y2-y1)**2):cosa:=(x2-x1)/L : sina:=(y2-y1)/L:pp[2*i-1,1]:=pp[2*i-1,1]-cosa*ff[k,1]:pp[2*i,1]:=pp[2*i,1 ]-sina*ff[k,1]:pp[2*j-1,1]:=pp[2*j-1,1]+cosa*ff[k,1]:pp[2*j,1]:=pp[2*j,1 ]+sina*ff[k,1]:od;for k from 1 to rowdim(NC) do;把支座反力引入节点力i:=NC[k,1]: j:=NC[k,2]:pp[2*i-2+j,1]:=X[i,j]+pp[2*i-2+j,1]:od;for k from 1 to rowdim(NP) do;已知载荷的处理i:=NP[k,1]: j:=NP[k,2]:nf[2*i-2+j,1]:=NP[k,3]:od;for k from 1 to rowdim(NC) do;约束出的位移由支反力替代i:=NC[k,1]: j:=NC[k,2]:uv[2*i-2+j,1]:=X[i,j]:od;for k from 1 to 2*rowdim(XY) do;节点平衡方程f[k]:=pp[k,1]=nf[k,1];od;solu:=solve({seq(f[i],i=1..rowdim(XY)*2)},{seq(uv[i,1],i= 1..rowdim(XY)*2)});位移与支座反力的求解ff:=subs(solu,evalm(ff)):for k from 1 to rowdim(NE) do;i:=NE[k,1]: j:=NE[k,2]:print(F[N,i,j]=evalf(ff[k,1],4)):od;ht(XY,NE);end proc:> truss();子程序的引用=F-33.00N12,,F=-33.00,,N23F=-33.00,,N34F-33.00=,,N4534.79F=N56,,-8.000F=N46,,-5.408F=N36,,37.50=F,,N67-5.408F=N37,,-8.000=F,,N2734.79=FN17,,第五章应用5.1 例一>XY:=matrix([[0,0],[0,6],[3,0],[3,3],[3,7],[6,0],[6,6],[6 ,8],[9,0],[9,9],[12,0],[12,6],[12,8],[15,0],[15,3],[15,7] ,[18,0],[18,6]]):>NE:=matrix([[1,2,E,A],[1,3,E,A],[1,4,E,A],[2,5,E,A],[5,4,E,A],[5,8,E,A],[4,3,E,A],[4,6,E,A],[4,7,E,A],[3,6,E,A],[6,7,E,A],[6,9,E,A],[7,8,E,A],[7,9,E,A],[7,10,E,A],[8,10,E ,A],[9,10,E,A],[10,12,E,A],[10,13,E,A],[9,11,E,A],[9,12,E ,A],[12,13,E,A],[13,16,E,A],[15,16,E,A],[16,18,E,A],[12,15,E,A],[17,18,E,A],[15,17,E,A],[14,17,E,A],[14,15,E,A],[11,14,E,A],[11,15,E,A],[11,12,E,A]]):> NP:=matrix([[5,2,-10],[8,2,-10]]):> NC:=matrix([[1,1],[1,2],[17,2]]):➢ truss();⏹= F ,,N 120. = F ,,N 1315. = F ,,N 14-21.21 = F ,,N 250. = F ,,N 54-10. = F ,,N 580. = F ,,N 430. = F ,,N 46-7.08 = F ,,N 47-14.14 = F ,,N 3615. = F ,,N 67 4.993 = F ,,N 6910. = F ,,N 78-10. = F ,,N 79-11.18 = F ,,N 710-7.070 = F ,,N 8100.= F ,,N 91010.= F ,,N 1012-7.070= F ,,N 10130.= F ,,N 911 5.= F ,,N 9120.= F ,,N 12130.= F ,,N 13160.= F ,,N 15160.= F ,,N 16180.= F ,,N 1215-7.070= F ,,N 17180.= F ,,N 1517-7.070= F ,,N 1417 5.= F ,,N 14150.= F ,,N 1114 5.= F ,,N 1115-.01= F ,,N 1112-.015.2 例二>XY:=matrix([[0,0],[2,-2],[2,0],[4,-2],[4,0],[6,-2],[6,0] ,[8,0],[10,-2],[10,0],[12,-2],[12,0],[14,-2],[14,0],[16,0 ]]):>NE:=matrix([[1,2,E,A],[1,3,E,A],[2,3,E,A],[2,4,E,A],[3,4 ,E,A],[3,5,E,A],[5,4,E,A],[4,6,E,A],[4,7,E,A],[5,7,E,A],[ 6,7,E,A],[6,8,E,A],[7,8,E,A],[6,9,E,A],[8,9,E,A],[8,10,E, A],[9,10,E,A],[9,11,E,A],[10,11,E,A],[10,12,E,A],[11,12,E ,A],[11,13,E,A],[11,14,E,A],[12,14,E,A],[13,14,E,A],[13,1 5,E,A],[14,15,E,A]]):> NP:=matrix([[5,2,-10],[8,2,-10]]):> NC:=matrix([[1,1],[1,2],[15,2]]): >truss();17.68F=N12,,-12.50=FN13,,-12.50=FN23,,F=12.50,,N2417.68=F,,N34F-25.=N35,,-10.F=N54,,27.50=FN46,,F=-3.535,,N47-25.=FN57,,F=2.500,,N67F-3.535=N68,,-27.50=FN78,,F=30.,,N69F-10.60=N89,,F=-22.50N810,,F=7.500,,N91022.50=FN911,,-10.60=FN1011,,-15.F=N1012,,= F ,,N 11120.= F ,,N 11137.500= F ,,N 111410.60= F ,,N 1214-15.= F ,,N 1314-7.500= F ,,N 131510.60= F ,,N 1415-7.500第六章结论本次课程利用结构力学位移法编写MAPLE程序计算平面桁架的受力。