第四章双像立体测图基础与立体测图
- 格式:ppt
- 大小:1.68 MB
- 文档页数:66

名词解释、简答题、论述题、证明题第二章 影像获取1、像主点:物方主平面和像方主平面与光轴的交点分别称为物方主点和像方主点2、摄影机主距:航空摄影机物镜中心至底片面的距离,称为摄影机的主距,通常用f 表示第三章 摄影测量基础知识1、 摄影比例尺与摄影航高摄影比例尺又称为像片比例尺,其严格定义为:航摄相片上一线段为l 的影像与地面上相应线段的水平距离L 之比,即Hl m =1,f 为摄影机主距 当取摄区内的平均高程面作为摄影基准面时,摄影机的物镜中心至该面的距离称为摄影航高,一般用H 表示。
2、重叠度(重点看)为了满足测图的需要,在同一条航线上,相邻两像片应有一定范围的影像重叠,称为航向重叠,相邻航线也应有足够的重叠,称为旁向重叠。
重叠反映在航摄片上的同名影像是以像幅尺寸的百分数表示,航向重叠一般要求为p%=60%~65%,最小不得小于53%;旁向重叠要求为q%=30%~40%,最小不得小于15%。
3、像片倾角在摄影瞬间摄影机轴发生了倾斜,摄影机轴与铅直方向的夹角α称为像片的倾角。
一般要求倾角不大于2º,最大不超过3º4、航线弯曲受技术和自然条件限制,飞机往往不能按预定航线飞行而陈胜航线弯曲,造成漏摄或旁向重叠过小从而影响内业成图。
一般要求航摄最大偏距与全航线长之比不得大于3%5、像片旋角相邻像片的主点连线与像幅沿航线方向两框标连线间的夹角称为像片旋角,以κ表示,一般要求κ角不超过6º,最大不超过8º6、中心投影与正射投影若投影光线会聚于一点,称为中心投影,若投影光线相互平行且垂直于投影面,称为正射投影。
(此部分注重理解,最好翻看P26页,与图形结合)6、航摄像片上特殊的点、线、面,及之间的几何关系 (了解) 详见P28、297、.摄影测量常用哪些坐标系?各坐标系又是如何定义的?摄影测量中常用坐标系有两大类:一类是用于描述像点的位置,称为像方坐标系;另一类是描述地面点的位置,称为物方坐标系。
第一章绪论1.摄影测量的三个阶段:模拟、解析、数字。
2.摄影测量的主要特点:①无需接触被摄物体本事获得其信息;②有二维影像重建三维目标;③面采集数据形式;④同时提取物体的几何与物理特征。
3.摄影测量按用途可分为:地形和非地形测量。
4.传统的摄影测量与数字摄影测量的区别:传统的摄影测量是利用光学摄影机提取像片,通过像片来研究和确定被摄物体的形状、大小、位置和相互关系的一门科学技术。
数字摄影测量是利用所采集的数字化影像,在计算机上进行各种数值、图形和影像处理,研究目标的几何和物理特性,从而获得各种形式的数字产品和可视化产品。
区别点原始资料投影方式操作方式产品传统光学像片物理投影人工操作模拟产品数字数字化影像数字投影自动化+人工干预数字产品第二章影像获取1.框标的作用:建立像片的直角框标坐标系。
2.摄影机主距(f):航空摄影机物镜中心至底片面的距离是固定值,称为摄影机主距。
它与物镜焦距基本一致,因物镜畸变等因素而有少许差异。
3.常用的遥感数据有:美国陆地卫星(Landsat)TM和MSS遥感数据,法国SPOT卫星遥感数据。
4.量测型相机与非量测型相机的区别:是否有框标。
第三章摄影测量基础知识1.绝对航高:摄影瞬间摄影机物镜中心相对于平均海水面的航高。
2.相对航高:摄影瞬间摄影机物镜中心相对于其他某一基准面或某一点的高度。
3.影像方位元素:方位元素:确定摄影时摄影物镜(摄影中心S )、像片与地面三者之间相关位置的参数。
即摄影瞬间摄影中心S 、像片在地面设定的空间坐标系中的位置与姿态。
①内方位元素:摄影物镜中心S 相对于影像位置关系的参数(x 0 ,y 0 f )。
②外方位元素:确定影像或摄影光束在摄影瞬间的空间位置和姿态的参数(Xs, Ys, Zs,φ,ω,κ )。
获取方法:①单像空间后方交会求解;②GPS 测定(一台,Xs, Ys, Zs,三台φ,ω,κ );③POS 系统测定,GPS+惯导系统。
4.R 阵为旋转矩阵,正交矩阵。

第一章、 绪论1、从摄影测量学得发展来看,可划分为三个阶段:模拟摄影测量、解析摄影测量和数字摄影测量。
第二章、影像获取2、航空摄影机和普通摄影机的区别(即航空摄影机的主要特征):航空摄影机具有框标标志。
包括光学框标和机械框标,用以建立框标坐标系。
3、像幅:像场内,圆内接(或外切)正方形(矩形)。
尺寸:18cm ×18cm ,23cm ×23cm 。
30cm ×30cm 。
第三章、摄影测量基础知识4、摄影比例尺(像片比例尺):航摄像片上一线段为l 与地面上相应线段的水平距L 之比。
摄影比例尺是像片的平均比例尺。
公式:1/m=l/L=f/H ,其中f 为摄影机主距,H 为航高。
5、摄影基线的定义:摄影的曝光过程是飞机在飞行中瞬间完成的,在这一瞬间时刻,摄影机物镜所在的空间位置称为摄站点,航线方向相邻两摄站点间的空间距离称为摄影基线,用B 表示。
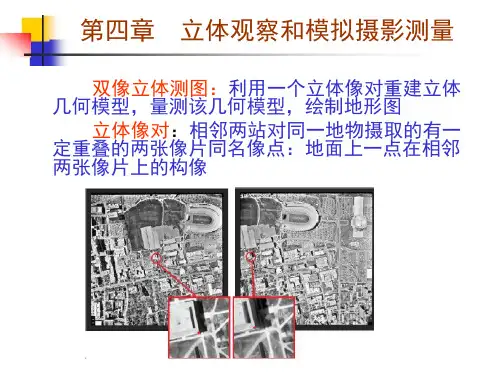
6、像片重叠:①航向重叠:同一航线内相邻像片上具有同一地区影像的部分。
一般情况下,要求航向重叠度最小不能少于53%,最好为p%=60%-65%。
②旁向重叠:相邻航线的相邻像片上具有同一地区影像的部分。
一般情况下,旁向重叠度不得少于15%,保持在q%=30%-40%之间。
③要求像片重叠的目的:①便于像片立体观察与量测;②便于像片拼接。
7、投影:中心投影和平行投影。
平行投影:斜投影和正射投影。
航片是中心投影,地图属于正射投影。
8、航摄像片上特殊的点、线、面:P28图①透视变换中的重要的点:像主点—地主点 、像底点—地底点 、二重点(迹点)、等角点、合点、主合点、遁点。
②重要的线:摄影机轴(摄影方向,主光轴)、透视轴、主垂线、主纵线、基本方向线、真水平线(合线)、等比线、主横线。
③重要的面:主垂面、真水平面(合面)。
9、透视变换作图:画图。
P29(见后面的图)10、摄影测量常用的坐标系统(五个):①像平面坐标系;②像空间坐标系;③像空间辅助坐标系;④地面测量坐标系;⑤地面摄影测量坐标系。
摄影测量学复习资料第一章绪论1、摄影测量的定义、任务定义:摄影测量与遥感是从非接触成像和其他传感器系统,通过记录、量测、分析与表达等处理,获取地球及其环境和其他物体可靠信息的工艺,科学与技术。
其中摄影测量侧重于提取几何信息,遥感侧重于物理信息。
任务:(1)测绘各种比例尺地形图。
(2)建立数字地面模型(地形数据库)。
2、摄影测量学:是对研究的对象进行摄影,根据所得的构象信息,从几何方面和物理方面加以分析研究,从而对所摄对象的本质提供各种资料的一门学科。
3、解决的基本问题:几何定位和影像解译。
4、摄影测量的三个发展阶段及其特点。
(了解)5、摄影测量的分类方法及其分类(了解):(1)按距离远近可分为航天摄影测、航空摄影测量、地面摄影测量、近景摄影测量和显微摄影测量;(2)按用途可分为地形摄影测量和非地形摄影测量;(3)按处理手段可分为模拟摄影测量、解析摄影测量和数字摄影测量;(4)根据摄影机平台位置的不同可分为航天摄影测量、航空摄影测量、地面摄影测量和水下摄影测量。
第二章影像的获取1、航空影像和遥感影像的获取方式航空影像:飞机等航空平台搭乘航摄仪(或数码相机)摄影成像;一般航空影像分为专业航摄仪(航空摄影机)获取的标准航片和非量测摄影机(普通摄影机)获取的非标准航片。
遥感影像:卫星等航天平台利用各类传感器(阵列扫描、推扫)获取遥感影像。
例如SPOT、QB、TM、IKONOS、World View等影像。
2、量测摄影机与非量测摄影机的区别(1)量测摄影机的主距是一个固定的已知值(2)量测摄影机的承片框上具有框标,即固定不变的承片框上,四个边的中点各安置一个机械标志;框标,其目的是建立像片的直角,框标坐标系。
(3)量测摄影机的内方位元素是已知值。
3、航向重叠:摄影时飞机沿相邻影像之间必须保持一定的重叠度。
一般P=50%~65%;P值最小不能小于53%。
旁向重叠:完成一条航线的摄影后,飞机进入另一条航线进行测量摄影,相邻航线影像之间也必须有一定的重叠。