摄影测量学基础第5章 双像解析立体测量
- 格式:ppt
- 大小:1.11 MB
- 文档页数:97
第1篇一、实验目的1. 理解双像解析的基本原理和方法。
2. 掌握双像解析在摄影测量中的应用。
3. 通过实验,提高对实际图像处理和分析的能力。
二、实验原理双像解析是摄影测量学中的一种基本方法,它通过分析两幅不同视角拍摄的图像,提取地面物体的三维信息。
实验原理主要包括以下几部分:1. 同名像点对应:在两张不同视角的图像中,对于同一地物点,会存在两个对应的像点。
2. 像点坐标转换:根据像点坐标和摄影参数,可以将像点坐标转换为地面点的三维坐标。
3. 立体观测原理:通过立体观测,可以消除像点坐标中的误差,提高地面坐标的精度。
三、实验准备1. 实验器材:双像解析软件、计算机、数码相机、双像对图像数据等。
2. 实验数据:选择合适的双像对图像数据,确保图像质量良好,地面特征明显。
四、实验步骤1. 图像预处理:- 对图像进行去噪声、增强对比度等预处理操作,提高图像质量。
- 对图像进行几何校正,消除畸变和比例尺误差。
2. 同名像点匹配:- 利用双像解析软件,进行同名像点匹配,确保匹配精度。
3. 立体观测:- 通过立体观测,消除像点坐标中的误差,提高地面坐标的精度。
4. 三维坐标提取:- 根据同名像点坐标和摄影参数,计算地面点的三维坐标。
5. 精度分析:- 对提取的三维坐标进行精度分析,评估实验结果。
五、实验结果与分析1. 同名像点匹配结果:- 图像预处理和同名像点匹配效果良好,匹配精度达到预期。
2. 立体观测结果:- 立体观测消除了像点坐标中的误差,提高了地面坐标的精度。
3. 三维坐标提取结果:- 提取的三维坐标与实际地面坐标相对误差在可接受范围内。
4. 精度分析:- 通过实验结果,可以得出以下结论:- 双像解析方法在提取地面三维坐标方面具有较高的精度。
- 图像预处理和同名像点匹配对实验结果有重要影响。
- 立体观测可以显著提高地面坐标的精度。
六、实验总结1. 通过本次实验,掌握了双像解析的基本原理和方法,提高了实际图像处理和分析的能力。
双像解析摄影测量三种方法的比较学习心得双像解析摄影测量是一种用于测量地面特征的三维位置和形状的技术。
它利用空中斜摄影图像,通过计算机算法对图像数据进行处理和分析,得出精确的三维坐标。
在双像解析测量中,有三种主要的方法:立体模型法,重叠法和三角法。
在本文中,我将对这三种方法进行比较并分享我的学习心得。
立体模型法是一种通过建立完整的三维模型来进行双像解析测量的方法。
在这个过程中,摄影机拍摄两个立体图像,然后将它们输入计算机进行处理。
通过对两个图像进行匹配,可以确定地面特征的三维位置。
这种方法的优点是可以获取非常精确的三维位置信息,但是需要相对较长的计算时间和较高的计算能力。
在我的学习过程中,我了解了立体模型法的基本原理和算法,并通过实践尝试建立三维模型。
这个过程非常复杂,需要对图像的几何关系和像素级别的匹配有深入的理解。
我在实践中遇到了一些困难,但通过不断学习和尝试,我最终成功建立了一个精确的三维模型。
重叠法是另一种常用的双像解析测量方法。
它利用摄影机在拍摄过程中产生的重叠区域来获取地面特征的三维位置。
在这个方法中,摄影机连续拍摄多个图像,并通过计算机算法将它们拼接在一起。
通过对重叠区域进行匹配,可以确定地面特征的位置。
重叠法的优点是相对简单和快速,但精度可能会受到图像拼接过程中的误差影响。
在我的学习过程中,我学习了重叠法的原理和算法,并通过实践尝试用这种方法处理图像数据。
我注意到重叠法在处理大量数据时的效率非常高,但需要仔细处理图像拼接过程中的误差问题。
三角法是双像解析测量中的第三种方法。
它利用摄影机和地面特征之间的三角关系来推导出地面特征的三维位置。
在这种方法中,摄影机拍摄两个图像,并通过计算机算法计算地面特征的位置。
三角法的优点是简单和直观,但相对较不精确。
在我的学习过程中,我学习了三角法的基本原理和算法,并通过实践尝试使用这种方法处理图像数据。
我发现三角法在处理简单的测量需求时非常方便,但在复杂的情况下可能会遇到精度问题。
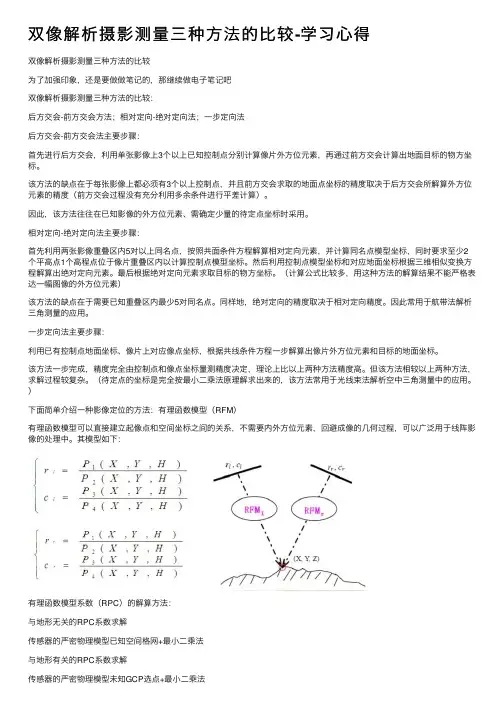
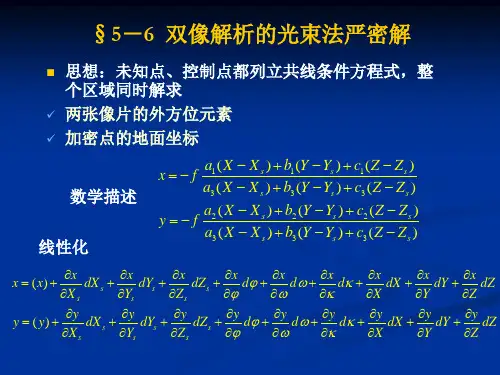
双像解析摄影测量三种⽅法的⽐较-学习⼼得双像解析摄影测量三种⽅法的⽐较为了加强印象,还是要做做笔记的,那继续做电⼦笔记吧双像解析摄影测量三种⽅法的⽐较:后⽅交会-前⽅交会⽅法;相对定向-绝对定向法;⼀步定向法后⽅交会-前⽅交会法主要步骤:⾸先进⾏后⽅交会,利⽤单张影像上3个以上已知控制点分别计算像⽚外⽅位元素,再通过前⽅交会计算出地⾯⽬标的物⽅坐标。
该⽅法的缺点在于每张影像上都必须有3个以上控制点,并且前⽅交会求取的地⾯点坐标的精度取决于后⽅交会所解算外⽅位元素的精度(前⽅交会过程没有充分利⽤多余条件进⾏平差计算)。
因此,该⽅法往往在已知影像的外⽅位元素、需确定少量的待定点坐标时采⽤。
相对定向-绝对定向法主要步骤:⾸先利⽤两张影像重叠区内5对以上同名点,按照共⾯条件⽅程解算相对定向元素,并计算同名点模型坐标,同时要求⾄少2个平⾼点1个⾼程点位于像⽚重叠区内以计算控制点模型坐标。
然后利⽤控制点模型坐标和对应地⾯坐标根据三维相似变换⽅程解算出绝对定向元素。
最后根据绝对定向元素求取⽬标的物⽅坐标。
(计算公式⽐较多,⽤这种⽅法的解算结果不能严格表达⼀幅图像的外⽅位元素)该⽅法的缺点在于需要已知重叠区内最少5对同名点。
同样地,绝对定向的精度取决于相对定向精度。
因此常⽤于航带法解析三⾓测量的应⽤。
⼀步定向法主要步骤:利⽤已有控制点地⾯坐标、像⽚上对应像点坐标,根据共线条件⽅程⼀步解算出像⽚外⽅位元素和⽬标的地⾯坐标。
该⽅法⼀步完成,精度完全由控制点和像点坐标量测精度决定,理论上⽐以上两种⽅法精度⾼。
但该⽅法相较以上两种⽅法,求解过程较复杂。
(待定点的坐标是完全按最⼩⼆乘法原理解求出来的,该⽅法常⽤于光线束法解析空中三⾓测量中的应⽤。
)下⾯简单介绍⼀种影像定位的⽅法:有理函数模型(RFM)有理函数模型可以直接建⽴起像点和空间坐标之间的关系,不需要内外⽅位元素,回避成像的⼏何过程,可以⼴泛⽤于线阵影像的处理中。
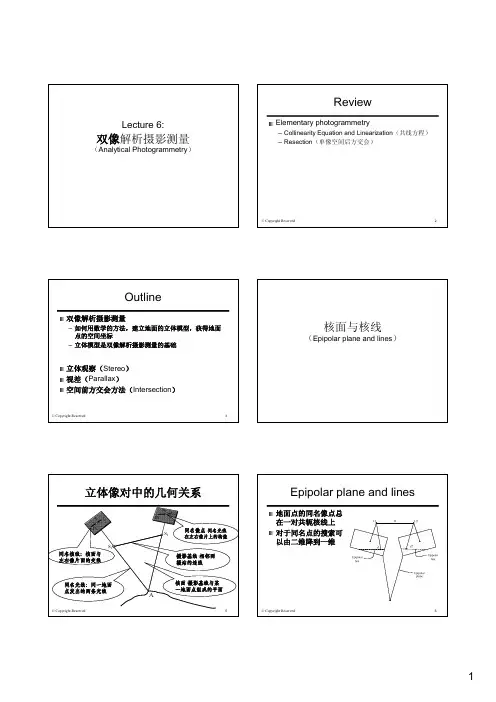
1Lecture 6:双像解析摄影测量(Analytical Photogrammetry)
2©Copyright Reserved
ReviewElementary photogrammetry–Collinearity Equation and Linearization(共线方程)–Resection(单像空间后方交会)
3©Copyright ReservedOutline双像解析摄影测量–如何用数学的方法,建立地面的立体模型,获得地面点的空间坐标–立体模型是双像解析摄影测量的基础
立体观察(Stereo)视差(Parallax)空间前方交会方法(Intersection)
核面与核线(Epipolarplane and lines)
5©Copyright ReservedAS1S2p1p2l1l2同名光线:同一地面点发出的两条光线同名像点:同名光线在左右像片上的构像同名核线:核面与左右像片面的交线核面:摄影基线与某一地面点组成的平面摄影基线:相邻两摄站的连线立体像对中的几何关系a1a26©Copyright ReservedEpipolarplane and lines地面点的同名像点总在一对共轭核线上
对于同名点的搜索可以由二维降到一维2
7©Copyright ReservedP1S1EP2
S2
P1
S1
P2
S2
E理想像对相邻两像片水平、摄影基线水平组成的像对正直像对相邻两像片水平、摄影基线不水平组成的像对P1S1P2S2E竖直像对相邻两像片不水平、摄影基线不水平组成的像对
立体像对分类立体视觉和视差(Stereo and Parallax)
9©Copyright Reserved三维立体画10©Copyright Reserved人眼视觉人眼是视觉成像系统,与相机类似单眼(单像)不能感知远近双眼形成立体
视网膜上有感光细胞,感光后,通过视神经纤维传至大脑视觉中心,经记忆加入已有的概念与经验(心理过程),从而形成感知