非线性数学模型的线性化
- 格式:doc
- 大小:60.00 KB
- 文档页数:3
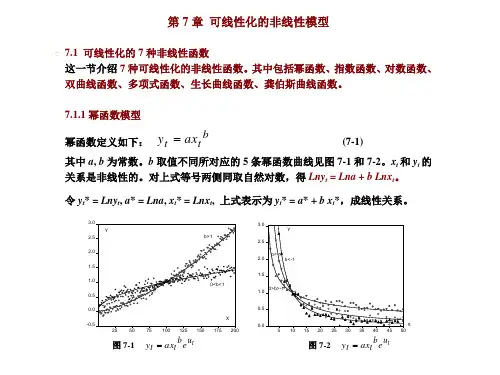


非线性化模型的线性化方法总结在学习计量经济学过程中,我们所接触的经济学模型不仅仅是线性的,许多实际经济活动中的经济模型都是非线性的,例如恩格尔曲线表现为幂函数曲线形式,菲利普斯曲线表现为双曲线形式,下面介绍三种非线性模型的转化方法,分别适应于不同的模型:一、直接置换法:直接替换模型中原有的非线性变量。
适用模型如下:(1)倒数(双曲线)模型:0111u Q P ββ=++,可以用1Y Q =,1X P=来置换,变为01Y X u ββ=++(2)多项式模型:2012Y t t u βββ=+++,可以用212,X t X t ==来置换变为: 0122Y X X u βββ=+++(3)对数模型: 01ln Y X u ββ=++,将1ln X X=带入原式进行置换,得到:011Y X u ββ=++二、函数变换法:通过函数变化,如取对数、移项等方式对原模型进行变形以得到线性化模型:12(,,,)k Y f X X X u =⋅⋅⋅+(1) 幂函数模型:u Q AK L e αβ=,方程两边取对数,得到:ln ln ln ln Q A K L u αβ=+++再对上式进行置换。
(2)指数函数模型:Q uC ab e =,方程两边取对数得到:ln ln ln C a Q b u =++,再对上式进行置换。
三、级数展开法:如CES 函数112()p p u pQ A K L e δδ---=+,方程两边取对数得到:121ln ln ln()p p Q A K L u pδδ--=-++,将式中12ln()p p K L δδ--+在p=0处展开泰勒级数,取关于p 的线性项,即得到一个线性近似式,如取0阶、1阶、2阶项,可得:212121ln ln ln ln [ln()]2K Y A K L p Lδδδδ=++- (备注:无法线性化的模型一般为:12(,,,)k Y f X X X u =⋅⋅⋅+,其中12(,,,)k f X X X ⋅⋅⋅为非线性函数)。
第二章控制系统的数学模型第3讲非线性微分方程的线性化王燕舞为什么要进行线性化?严格的说,几乎所有元件或系统的运动方程都是非线性方程,即输入、输出和扰动等之间的关系都是非线性的。
非线性微分方程的求解和控制系统性能研究非常复杂,而线性化后的模型可借助叠加原理的性质,简化系统分析。
因此,研究非线性微分方程的线性化具有较强的工程实用价值。
什么是非线性数学模型的线性化?在一定的条件下或在一定范围内把非线性的数学模型化为线性模型的处理方法。
符合什么条件的系统可以进行线性化呢?▪条件1: 小偏差理论或小信号理论。
在工程实践中,控制系统都有一个额定的工作状态和工作点,当变量在工作点附近作小范围的变化时,就满足这个条件。
▪条件2: 在工作点附近存在各阶导数或偏导数。
如何进行线性化呢?假设微分方程模型中包含非线性函数f(x)如图所示。
设y=f(x),假设系统在工作点(x 0, y 0), y 0=f(x 0) 附近变化,且在该工作点处各阶导数均存在,在(x 0, y 0)附近将y 展开成泰勒级数:)()()()(000xx x x x f x f x f y -⎥⎦⎤⎢⎣⎡∂∂+==若偏差Δx=x-x 0很小,可忽略级数中高阶无穷小项,上式化为)()()()()()(00000x xK x f x x x x x f x f x f y -+=-⎥⎦⎤⎢⎣⎡∂∂+≈=K 表示y=f(x)曲线在(x 0,y 0)处切线的斜率。
因此非线性函数在工作点处可以用该点的切线方程线性化。
yy=f(x)y 0x 0x ⋯+-⎥⎦⎤⎢⎣⎡∂∂+20022)()(!21x x x x x f xK x f x f y y y ∆=-=-=∆)()(00如何进行线性化呢?小偏差法:在给定工作点的邻域将非线性函数展开为泰勒级数,忽略级数中的高阶项,得到只包含偏差的一次项的线性方程。
液位流体过程。
如图,Q1为流入量,也是输入量;Q 2为流出量;h 为液位高度,为系统输出;C 为液缸的截面积。
非线性化模型的线性化方法总结在学习计量经济学过程中,我们所接触的经济学模型不仅仅是线性的,许多实际经济活动中的经济模型都是非线性的,例如恩格尔曲线表现为幂函数曲线形式,菲利普斯曲线表现为双曲线形式,下面介绍三种非线性模型的转化方法,分别适应于不同的模型:一、直接置换法:直接替换模型中原有的非线性变量。
适用模型如下:(1)倒数(双曲线)模型:0111u Q P ββ=++,可以用1Y Q =,1X P=来置换,变为01Y X u ββ=++(2)多项式模型:2012Y t t u βββ=+++,可以用212,X t X t ==来置换变为: 0122Y X X u βββ=+++(3)对数模型: 01ln Y X u ββ=++,将1ln X X=带入原式进行置换,得到:011Y X u ββ=++二、函数变换法:通过函数变化,如取对数、移项等方式对原模型进行变形以得到线性化模型:12(,,,)k Y f X X X u =⋅⋅⋅+(1) 幂函数模型:u Q AK L e αβ=,方程两边取对数,得到:ln ln ln ln Q A K L u αβ=+++再对上式进行置换。
(2)指数函数模型:Q uC ab e =,方程两边取对数得到:ln ln ln C a Q b u =++,再对上式进行置换。
三、级数展开法:如CES 函数112()p p u pQ A K L e δδ---=+,方程两边取对数得到:121ln ln ln()p p Q A K L u pδδ--=-++,将式中12ln()p p K L δδ--+在p=0处展开泰勒级数,取关于p 的线性项,即得到一个线性近似式,如取0阶、1阶、2阶项,可得:212121ln ln ln ln [ln()]2K Y A K L p Lδδδδ=++- (备注:无法线性化的模型一般为:12(,,,)k Y f X X X u =⋅⋅⋅+,其中12(,,,)k f X X X ⋅⋅⋅为非线性函数)。
非线性数学模型的线性化
假设有一个输入为 )(t x 、输出为 )(t y 、其输入-输出关系为 ()x f y =的系统,如图3.52所示, )(t y 与 )(t x 之间具有非线性关系。
),(00y x A 为系统的工作点,即 )(00x f y =,在A 点附近,当输入变量 )(t x 作 x ∆变化时,对应的输出变量的增量为 y ∆。
而对于通过 A 点的切线, x 变化 x ∆时, y 的增量为 'y ∆。
显然,当 x 在平衡工作点A 附近只作微小的变化 x ∆,则 y ∆≈'y ∆,故可近似地认为有
y ∆≈xtga y ∆=∆' (3.88)
式中 tga ——函数 ()x f y =在 ),(00y x A 点处的导数。
图3.52 非线性关系线性化
以增量为变量的微分方程,称为增量方程,故式(3.88)为线性增量方程。
由此可见,在滑动范围内, y ∆可用 'y ∆近似而和 x ∆有线性关系,即可用切线代替原来的非线性曲线,从而把非线性问题线性化了。
这种线性化方法,称为滑动线性化法,或切线法。
滑动线性化的这种近似,对大多数控制系统来说都是可行的。
首先,控制系统在通常情况下,都有一个正常的稳定的工作状态,称为平衡工作点。
例如,恒温控制系统的正常工作状态是输入、输出为常值(输出为被控温度,输入为期望值)。
其次,当系统的输入或输出相对于正常工作状态发生微小偏差时,系统会立即进行控制调节,力图去消除此偏差,因此可以看出,这种偏差是“小偏差”,不会很大。
滑动线性化这种近似,用数学方法来处理,就是将变量的非线性函数展开成泰勒级数,分解成这些变量在某工作状态附近的小增量的表达式,然后略去高于一次小增量的项,就获得近似的线性函数。
对于以一个自变量作为输入量的非线性函数 ()x f y =,在平衡工作点 ),(00y x 附近展开成泰勒级数,则有
()
()()()()()()0002323000023d d d 11()d 2!d 3!d x x x x x x f x f x f x y f x f x x x x x x x x x x =====+-+-+-+
略去高于一次增量 0x x x -=∆的项,便有
()()()000d d x x f x y f x x x x ==+- (3.89)
或
<![endif]> (3.90)
式中, )(00x f y =称为系统的静态方程; 0d ()
d x x f x K x ==。
式(3.89)或式(3.90)就是非线性系统的线性化数学模型。
式(3.90)为增量方程式。
若输出变量 y 与输入变量 1x 、 2x 有非线性关系,即 ),(21x x f y =,那么同样地将这个方程式在工作点 ),(2010x x 附近展开成泰勒级数,并忽略二阶和高阶导数项,便可得到 y 的线性化方程为
)
()(),(20221011201020210120
2101x x x f x x x f
x x f y x x x x x x x x -∂∂+-∂∂+=====(3.91) 写成增量方程式,则有
22110x K x K y y y ∆+∆=∆=-
(3.92) 式中, ),(20100x x f y =为系统静态方程, 2021012021012211;x x x x x x x x x f K x f K ====∂∂=∂∂=。