算法设计与分析-第6章 动态规划
- 格式:ppt
- 大小:1.86 MB
- 文档页数:2
算法设计与分析中的动态规划动态规划是一种常用的算法设计与分析方法,它在解决各种实际问题时具有广泛的应用。
动态规划的基本思想是将问题划分为若干个子问题,通过求解子问题的最优解来得到原问题的最优解。
本文将介绍动态规划的基本概念、应用场景以及算法的设计与分析方法。
一、动态规划的基本概念动态规划有三个基本要素,即最优子结构、边界条件和状态转移方程。
最优子结构是指原问题的最优解可以通过求解子问题的最优解得到。
边界条件是指最小的子问题的解,也就是动态规划中的初始条件。
状态转移方程是指原问题与子问题之间的关系,通过状态转移方程可以将原问题的解与子问题的解联系起来。
二、动态规划的应用场景动态规划广泛应用于各个领域,比如图论、字符串处理、计算几何等。
在图论中,动态规划可以用来求解最短路径问题;在字符串处理中,动态规划可以用来求解最长公共子序列问题;在计算几何中,动态规划可以用来求解最大矩形面积问题。
除此之外,动态规划还可以用来解决一些组合优化问题,比如背包问题和旅行商问题。
三、动态规划的算法设计与分析方法动态规划的算法设计与分析方法通常包括以下几个步骤:定义状态、确定状态转移方程、初始化边界条件、计算状态值以及求解最优解。
在定义状态时,需要明确状态变量的含义,以及状态之间的关系。
确定状态转移方程是动态规划的核心步骤,需要根据实际问题来构造合适的状态转移方程。
初始化边界条件是指求解最小子问题的解,通常需要根据实际问题来确定。
计算状态值是指利用状态转移方程来逐步求解子问题的最优解。
最后,通过求解最优解来得到原问题的解。
四、动态规划的实例分析以背包问题为例,说明动态规划的实际应用。
假设有一个背包,它的容量为C。
现有n个物品,每个物品的重量为w[i],价值为v[i]。
要求选取若干个物品放入背包中,使得背包所装物品的总价值最大。
这个问题可以通过动态规划来求解,具体步骤如下:1. 定义状态:dp[i][j]表示前i个物品放入容量为j的背包中所得到的最大价值。
算法设计技巧与分析参考答案第1章算法分析基本概念(a)6 (b)5 (c)6 (d)6算法执行了7+6+5+4+3+2+1=28次比较(a)算法MODSELECTIONSORT执行的元素赋值的最少次数是0,元素已按非降序排列的时候达到最小值。
(b) 算法MODSELECTIONSORT执行的元素赋值的最多次数是3(1)2n n ,元素已按非升序排列的时候达到最小值。
由上图可以看到执行的比较次数为1+1+2+2+2+6+2=16次。
由上图可以得出比较次数为5+6+6+9=26次。
FTF,TTT,FTF,TFF,FTF(a) 执行该算法,元素比较的最少次数是n-1。
元素已按非降序排列时候达到最小值。
(b) 执行该算法,元素比较的最多次数是(1)2n n -。
元素已按非升序排列时候达到最大值。
(c) 执行该算法,元素赋值的最少次数是0。
元素已按非降序排列时候达到最小值。
(d) 执行该算法,元素赋值的最多次数是3(1)2n n -。
元素已按非升序排列时候达到最大值。
(e)n 用O 符号和Ω符号表示算法BUBBLESORT 的运行时间:2()t O n =,()t n =Ω(f)不可以用Θ符号来表示算法的运行时间:Θ是用来表示算法的精确阶的,而本算法运行时间由线性到平方排列,因此不能用这一符号表示。
不能用p 关系来比较2n 和2100n 增长的阶。
∵221lim0100100n n n →∞=≠ 2n ∴不是2(100)o n 的,即不能用p 关系来比较2n 和2100n 增长的阶。
(a)当n 为2的幂时,第六步执行的最大次数是:12,2k k n j -==时,11[log ]log n ni i k n n n ====∑∑(b)由(a)可以得到:当每一次循环j 都为2的幂时,第六步执行的次数最大,则当33,22k kmn j ===(其中32k 取整)时,11[log(31)]log(1)n nkii i m n n ===-=-∑∑(c)用O 符号表示的算法的时间复杂性是(log )O n n 已证明n=2k 的情况,下面证明n=2k +1的情况:因为有⎥⎦⎥⎢⎣⎢+=⎥⎦⎥⎢⎣⎢21222k k所以n=2k +1时,第六步执行的最大次数仍是n log n 。

算法分析与设计技巧:动态规划汇报人:日期:•引言•动态规划的基本原理•动态规划的经典问题与应用目录•动态规划的优化技巧与策略•动态规划的扩展与进阶•总结与展望引言01动态规划是一种求解最优化问题的算法思想,它通过将问题拆分为若干个子问题,并对子问题进行逐一求解,最终得到原问题的解。
定义动态规划对于解决重叠子问题和最优子结构的问题具有高效性,可以避免重复计算,提高算法效率。
同时,动态规划也是很多实际问题的基础,如资源分配、最短路径、背包问题等。
重要性动态规划的定义与重要性动态规划与其他算法的关系动态规划与分治法类似,都是通过将原问题拆分为子问题来求解。
但是,动态规划适用于子问题之间存在重叠的情况,而分治法适用于子问题相互独立的情况。
与贪心算法的关系贪心算法也是一种求解最优化问题的算法,但是贪心算法在每一步选择时都选择当前状态下的最优解,而不考虑全局最优。
动态规划则通过保存子问题的解,以达到全局最优。
以上只是动态规划的一部分应用领域,实际上动态规划的应用非常广泛,几乎涉及到计算机科学和工程领域的各个方面。
序列比对问题:在生物信息学中,用于比对两个或多个序列,找出它们之间的最优匹配。
背包问题:给定一组物品,每种物品都有自己的重量和价值,在限定的总重量内,如何选择物品才能使得物品的总价值最大。
资源分配问题:在有限的资源下,如何分配资源以达到最大效益。
最短路径问题:在图中寻找从起点到终点的最短路径。
动态规划的应用领域动态规划的基本原02理最优子结构是指问题的最优解可以由其子问题的最优解组合得到。
定义重要性例子最优子结构是动态规划的基础,只有当一个问题具有最优子结构性质时,才能用动态规划来解决。
例如,在背包问题中,问题的最优解就是由每个物品是否装入背包的子问题的最优解组合而来。
030201最优子结构边界条件是指子问题的最小情况,即子问题不能再继续分解时的解。
定义边界条件是动态规划的起点,它确定了递推的基础情况,使得状态转移方程得以进行。

动态规划xx年xx月xx日CATALOGUE目录•动态规划算法简介•动态规划的基本原理•常见动态规划问题分析•动态规划算法优化•动态规划在实际应用中的实例•总结与展望01动态规划算法简介动态规划是一种通过将问题分解为相互重叠的子问题来解决问题的方法动态规划适合用于最优化决策序列,具有重叠子问题和最优子结构两个特征1 2 3动态规划的核心思想是记忆已经求解过的子问题的解,避免了重复计算动态规划通常用于最优化问题,可以得出全局最优解动态规划通常是基于自底向上的思路进行实现动态规划的应用场景最短路径问题如Floyd算法、Dijkstra算法等资源分配问题如背包问题、装箱问题、货郎担问题等序列比对问题如Smith-Waterman算法、Genetic Code算法等控制领域如最优控制、预测控制等计算机视觉领域如光流计算、立体视觉匹配等02动态规划的基本原理03自底向上的设计方法可以节省存储空间,减少重复计算,提高算法效率。
动态规划的自底向上设计方法01动态规划的自底向上设计方法是一种通过将问题分解为子问题,并从简单子问题求解逐步设计复杂问题的策略。
02在自底向上的设计过程中,首先解决基本子问题,并利用这些解来解决更大规模的问题,逐步构建出原问题的最优解。
动态规划的递推关系式是算法的核心,它通过将问题分解为子问题,将问题的解表示为子问题的解的组合。
递推关系式通常是一个数学公式,它根据子问题的解来推导出更大规模问题的解。
在递推关系式中,每个子问题的解都会被存储起来,以便后续使用。
动态规划的递推关系式动态规划的边界条件在动态规划中,每个子问题都有一个起始点和终止点,这些点就是边界条件。
边界条件确定了问题的起始状态和终止状态,使得算法可以正确地求解问题。
动态规划的边界条件是算法中非常重要的一个概念,它规定了问题的边界情况。
03常见动态规划问题分析Dijkstra算法、Floyd-Warshall算法、Bellman-Ford 算法总结词最短路径问题是在图中找到从起点到终点的最短路径,有多种算法实现,如Dijkstra算法、Floyd-Warshall 算法和Bellman-Ford算法等。
第6章动态规划判断06100011判断:在动态规划模型中,问题的阶段数等于问题中的子问题的数目;06100021判断:动态规划中,定义状态时应保证在各个阶段中所作决策的相互独立性;06100031判断:)动态规划的最优性原理保证了从某一状态开始的未来决策独立于先前已做出的决策;06100041判断:对一个动态规划问题,应用顺推或逆推解法可能会得出不同的最优解;06100051判断:动态规划计算中的“维数障碍”主要是由于问题中阶段数的急剧增加而引起的;06100061判断:)假如一个线性规划问题含有5个变量和3个约束,则用动态规划方法求解时将划分为3个阶段,每个阶段的状态将由一个5维的向量组成;06100071判断:任何一个多阶段决策过程的最优化问题,都可以用非线性规划模型来描述。
06100081判断:动态规划问题如果按状态转移率区分,可分成确定性的与随机性的.简答06200011简答:一个N阶段的决策过程具有哪特征?06200021简答:试述动态规划的优点。
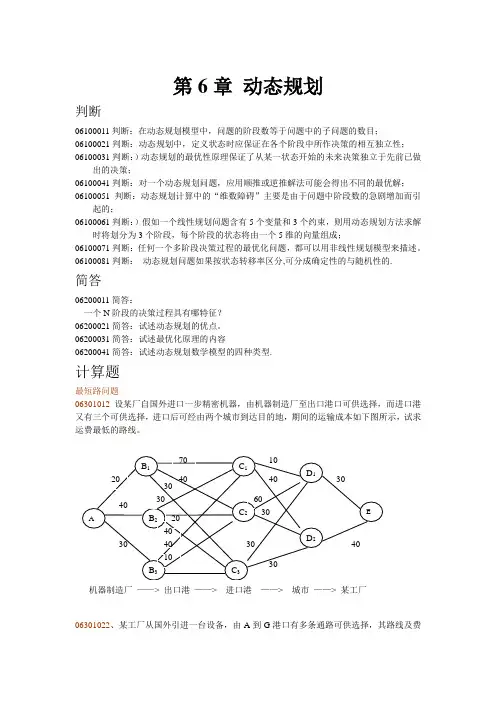
06200031简答:试述最优化原理的内容06200041简答:试述动态规划数学模型的四种类型.计算题最短路问题06301012设某厂自国外进口一步精密机器,由机器制造厂至出口港口可供选择,而进口港又有三个可供选择,进口后可经由两个城市到达目的地,期间的运输成本如下图所示,试求运费最低的路线。
06301022、某工厂从国外引进一台设备,由A到G港口有多条通路可供选择,其路线及费用如下图所示。
现要确定一条从A到G的使总费用最小的路线。
请将该问题描述成一个动态规划问题,然后求其最优解。
资源分配06302012有一部货车每天沿着公路给四个零售店卸下6箱货物,如果各零售店出售该货物06302022设有某种肥料共6个单位重量,准备供给四块粮田用,其每块粮田施肥数量与增06302033某公司打算向承包的三个营业区增设六个销售店,每个营业地区至少增设一个,从各区赚取的利润与增设的销售店个数有关,其数据如下表所示。
第六章 动态规划算法§1.动态规划算法的基本思想动态规划方法是处理分段过程最优化问题的一类及其有效的方法。
在实际生活中,有一类问题的活动过程可以分成若干个阶段,而且在任一阶段后的行为依赖于该阶段的状态,与该阶段之前的过程是如何达到这种状态的方式无关。
这类问题的解决是多阶段的决策过程。
在50年代,贝尔曼(Richard Bellman )等人提出了解决这类问题的“最优化原则”,从而创建了最优化问题的一种新的算法动态规划算法。
最优化原则指出,多阶段过程的最优决策序列应当具有性质:无论过程的初始状态和初始决策是什么,其余的决策都必须相对于初始决策所产生的状态构成一个最优决策序列。
这要求原问题的最优解包含了其子问题的一个最优解(称为最优子结构性质)。
动态规划算法采用最优原则来建立递归关系式(关于求最优值的),在求解问题时有必要验证该递归关系式是否保持最优原则。
若不保持,则不可用动态规划算法。
在得到最优值的递归式之后,需要执行回溯以构造最优解。
在使用动态规划算法自顶向下(Top-Down )求解时,每次产生的子问题并不总是新问题,有些子问题反复计算多次。
动态规划算法正是利用了这种子问题的重叠性质,对每一个问题只计算一次,而后将其解保存在一个表格中,当再次要解此子问题时,只是简单地调用(用常数时间)一下已有的结果。
通常,不同的子问题个数随着输入问题的规模呈多项式增长,因此,动态规划算法通常只需要多项式时间,从而获得较高的解题效率。
最优子结构性质和子问题重叠性质是采用动态规划算法的两个基本要素。
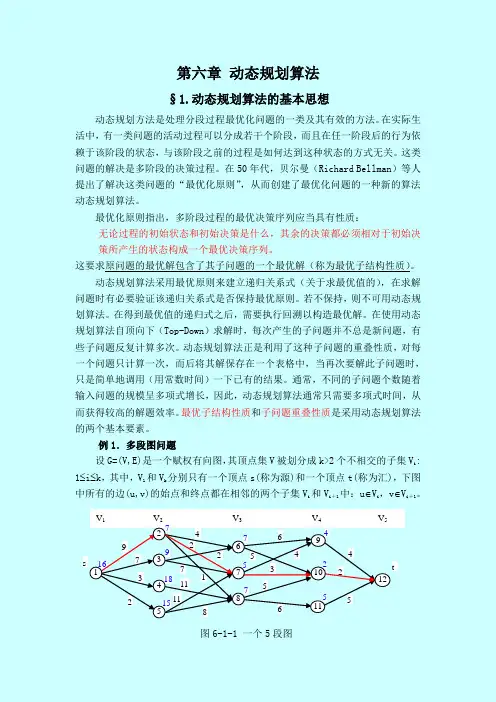
例1.多段图问题设G=(V,E)是一个赋权有向图,其顶点集V 被划分成k>2个不相交的子集V i : 1≤i ≤k ,其中,V 1和V k 分别只有一个顶点s(称为源)和一个顶点t(称为汇),下图中所有的边(u,v)的始点和终点都在相邻的两个子集V i 和V i +1中:u ∈V i ,v ∈V i +1。
算法设计与分析——流⽔作业调度(动态规划)⼀、问题描述N个作业{1,2,………,n}要在由两台机器M1和M2组成的流⽔线上完成加⼯。
每个作业加⼯的顺序都是先在M1上加⼯,然后在M2上加⼯。
M1和M2加⼯作业i所需的时间分别为ai和bi,1≤i≤n。
流⽔作业⾼度问题要求确定这n个作业的最优加⼯顺序,使得从第⼀个作业在机器M1上开始加⼯,到最后⼀个作业在机器M2上加⼯完成所需的时间最少。
⼆、算法思路直观上,⼀个最优调度应使机器M1没有空闲时间,且机器M2的空闲时间最少。
在⼀般情况下,机器M2上会有机器空闲和作业积压2种情况。
最优调度应该是:1. 使M1上的加⼯是⽆间断的。
即M1上的加⼯时间是所有ai之和,但M2上不⼀定是bi之和。
2. 使作业在两台机器上的加⼯次序是完全相同的。
则得结论:仅需考虑在两台机上加⼯次序完全相同的调度。
设全部作业的集合为N={1,2,…,n}。
S是N的作业⼦集。
在⼀般情况下,机器M1开始加⼯S中作业时,机器M2还在加⼯其他作业,要等时间t后才可利⽤。
将这种情况下完成S中作业所需的最短时间记为T(S,t)。
流⽔作业调度问题的最优值为T(N,0)。
这个T(S,t)该如何理解?举个例⼦就好搞了(⽤ipad pencil写的...没贴类纸膜,太滑,凑合看吧)1、最优⼦结构T(N,0)=min{ai + T(N-{i}, bi)}, i∈N。
ai:选⼀个作业i先加⼯,在M1的加⼯时间。
T(N-{i},bi}:剩下的作业要等bi时间后才能在M2上加⼯。
注意这⾥函数的定义,因为⼀开始⼯作i是随机取的,M1加⼯完了ai之后,要开始加⼯bi了,这⾥M1是空闲的可以开始加⼯剩下的N-i个作业了,但此时M2开始加⼯bi,所以要等bi时间之后才能重新利⽤,对应到上⾯函数T(s,t)的定义的话,这⾥就应该表⽰成T(N-{i},bi), 所以最优解可表⽰为T(N,0)=min{ai + T(N-{i}, bi)}, i∈N,即我们要枚举所有的⼯作i,使这个式⼦取到最⼩值。
第六章动态规划法• P137 2 ,3, 4•2.解答:cost[i]表示从顶点i 到终点n-1 的最短路径,path[i]表示从顶点i 到终点n-1 的路径上顶点i 的下一个顶点。
cost[i]=min{cij+cost[j]}3 有5 个物品,其重量分别是{3, 2, 1, 4,5},价值分别为{25, 20, 15, 40, 50},背包的容量为6。
V[i][j]表示把前i 个物品装入容量为j 的背包中获得的最大价值。
最优解为(0,0,1,0,1)最优值为65. 4.序列A =(x, z , y , z , z , y,x ),B =(z , x , y , y , z , x , z ),建立两个(m+1)×(n+1)的二 维表L 和表S ,分别存放搜索过程中得到的子序列的长度和状态。
z , x , y , y , z,x , z )path[i]= 使 cij+cost[j] 最小的 j i 012345678 9 10 11 12 13 14 15 Cost[i] 18 13 16 13 10 9 12 7 6875943Path[i]145778911 11 11 13 14 14 15 15 0得到最短路径 0->1->4->7->11->14->15 , 长度为 18(a)长度矩阵L(b)状态矩阵S 。
第七章贪心算法2.背包问题:有7 个物品,背包容量W=15。
将给定物品按单位重量价值从大到小排序,结果如下:个物品,物品重量存放在数组w[n]中,价值存放在数组放在数组x[n]中。
按算法7.6——背包问题1.改变数组w 和v 的排列顺序,使其按单位重量价值v[i]/w[i]降序排列;2.将数组x[n]初始化为0;//初始化解向量3.i=1;4.循环直到( w[i]>C )4.1 x[i]=1; //将第i个物品放入背包4.2 C=C-w[i];4.3 i++;5. x[i]=C/w[i];得出,该背包问题的求解过程为:: x[1]=1;c=15-1=14 v=6 x[2]=1; c=14-2=12V=6+10=10 x[3]=1; c=12-4=8V=16+18=34 x[4]=1; c=8-5=3V=34+15=49 x[5]=1; c=3-1=2 V=49+3=52x[6]=2/3 ; c=0; V=52+5*2/3=156/3 最优值为156/3 最优解为(1,1,1,1,1,2/3,0)) (x[i]按排序后物品的顺序构造)5.可以将该问题抽象为图的着色问题,活动抽象为顶点,不相容的活动用边相连(也可以将该问题理解为最大相容子集问题,重复查找剩余活动的最大相容子集,子集个数为所求).具体参见算法7.3 算法7.3——图着色问题1.color[1]=1; //顶点1着颜色12.for (i=2; i<=n; i++) //其他所有顶点置未着色状态color[i]=0;3.k=0;4.循环直到所有顶点均着色4.1k++; //取下一个颜色4.2for (i=2; i<=n; i++) //用颜色k 为尽量多的顶点着色4.2.1 若顶点i已着色,则转步骤4.2,考虑下一个顶点;4.2.2 若图中与顶点i邻接的顶点着色与顶点i着颜色k 不冲突,则color[i]=k;5.输出k;第八章回溯法4.搜索空间(a) 一个无向图(b) 回溯法搜索空间最优解为(1,2,1,2,3)5.0-1 背包问题n∑w i x i≤c 1• 可行性约束函数:i =1• 上界函数:nr =∑Vi5 = 3A B *CD8 ** * 131 =12 =23 = 14 = 2 34215课后答案网()i=k+1 1第九章分支限界法5,解:应用贪心法求得近似解:(1,4,2,3),其路径代价为:3+5+7+6=21,这可以作为该问题的上界。
习题11. 图论诞生于七桥问题。
出生于瑞士的伟大数学家欧拉(LeonhardEuler ,1707—1783)提出并解决了该问题。
七桥问题是这样描述的:一个人是否能在一次步行中穿越哥尼斯堡(现在叫加里宁格勒,在波罗的海南岸)城中全部的七座桥后回到起点,且每座桥只经过一次,图是这条河以及河上的两个岛和七座桥的草图。
请将该问题的数据模型抽象出来,并判断此问题是否有解。
七桥问题属于一笔画问题。
输入:一个起点输出:相同的点1, 一次步行2, 经过七座桥,且每次只经历过一次3, 回到起点该问题无解:能一笔画的图形只有两类:一类是所有的点都是偶点。
另一类是只有二个奇点的图形。
图 七桥问题南2.在欧几里德提出的欧几里德算法中(即最初的欧几里德算法)用的不是除法而是减法。
请用伪代码描述这个版本的欧几里德算法=m-n2.循环直到r=0m=nn=rr=m-n3 输出m3.设计算法求数组中相差最小的两个元素(称为最接近数)的差。
要求分别给出伪代码和C++描述。
编写程序,求n至少为多大时,n个“1”组成的整数能被2013整除。
#include<iostream>using namespace std;int main(){double value=0;for(int n=1;n<=10000 ;++n){value=value*10+1;if(value%2013==0){cout<<"n至少为:"<<n<<endl;break;}}计算π值的问题能精确求解吗编写程序,求解满足给定精度要求的π值#include <iostream>using namespace std;int main (){double a,b;double arctan(double x);圣经上说:神6天创造天地万有,第7日安歇。
为什么是6天呢任何一个自然数的因数中都有1和它本身,所有小于它本身的因数称为这个数的真因数,如果一个自然数的真因数之和等于它本身,这个自然数称为完美数。