第六章-机器人路径规划
- 格式:ppt
- 大小:3.55 MB
- 文档页数:41
机器人路径规划算法的使用教程及最优路径选择研究引言:机器人自动路径规划算法是一项核心技术,广泛应用于自动化领域。
从工业生产到物流配送,路径规划算法在提高效率和减少成本方面发挥着重要作用。
本文将介绍常用的机器人路径规划算法,并研究最优路径选择的方法。
一、机器人路径规划算法的基本概念路径规划算法是为了使机器人能够在给定的环境中找到一条合适的路径以达到目标位置。
常用的路径规划算法包括:Dijkstra算法、A*算法、RRT算法等。
1. Dijkstra算法Dijkstra算法是一种广度优先搜索算法,适用于图中没有负权边且权值非负的情况。
该算法通过计算节点之间的距离来选择路径,使得机器人能够找到最短路径。
算法的基本思想是:从起点开始,依次计算和更新每个节点的最短距离,直到到达目标节点。
2. A*算法A*算法是一种启发式搜索算法,利用启发函数来评估节点的优先级。
节点的优先级由节点的实际距离和启发函数的估计值决定。
A*算法的优势在于能够在保证最优路径的情况下,减少搜索的节点数量,提高运行效率。
3. RRT算法RRT算法(Rapidly-Exploring Random Trees)是一种概率地搜索无人驾驶路径的算法。
该算法通过随机生成节点和快速扩展树的方式,寻找可行的路径。
RRT算法在处理复杂环境中的路径规划问题时表现出色,但对于大规模的搜索空间效率较低。
二、机器人路径规划算法的实现步骤机器人路径规划算法的实现包含以下基本步骤:1. 构建地图根据所需的环境,建立一个合适的地图。
地图可以是栅格地图、连续空间地图或其他形式的表示。
2. 确定起始点和目标点选择机器人的起始点和目标点,这两个点是路径规划的关键。
3. 确定运动约束根据机器人的特性和环境的限制,确定机器人的运动约束。
这包括机器人的最大速度、最大加速度等。
4. 选择路径规划算法根据实际需求,选择合适的路径规划算法。
根据算法的特性和优劣进行权衡,选择最适合的算法。
机器人路径规划算法研究随着科技的不断发展和机器人技术的普及,机器人在工业、医疗、服务等领域的应用越来越广泛。
然而,机器人的自主移动是实现这些应用的核心。
而机器人路径规划算法是实现机器人自主移动的基础。
路径规划算法是指为机器人设定一个目标点,并规划出一条从机器人的当前位置到目标点的可行路径的计算过程。
路径规划算法的目的是让机器人在考虑到机器人自身的运动能力、环境限制和任务需求的情况下,能够高效、安全地到达目标点。
机器人路径规划算法的研究历史悠久。
早在20世纪70年代,就有学者开始研究机器人路径规划算法。
但当时机器人的应用还很有限,算法主要是用于解决在特定场景下机器人的路径规划和轨迹跟踪问题。
随着计算机和计算能力的快速提升,机器人的应用越来越广泛,路径规划算法也得到了大量的研究。
多种路径规划算法相继被提出,如基于搜索的算法、启发式算法、基于迭代优化的算法等。
其中,基于搜索的算法是一种经典的路径规划方式。
该算法将空间划分成网格图,通过搜索算法对所有可行的路径进行逐一遍历和评估,找到最优解。
该算法的优点是能够保证找到全局最优解,但受限于搜索空间的大小和复杂度,该算法不适用于大规模的空间。
启发式算法通过设定一些启发性的约束,规定机器人的路径不会远离目标点等,来加快路径规划的速度。
蚁群算法、遗传算法和模拟退火算法等都是基于启发式思想的算法。
这类算法适用于解决大规模的实际问题,但无法保证找到全局最优解。
而基于迭代优化的算法,通过迭代计算来逐步优化路径。
例如,目前研究比较火热的深度强化学习算法,结合机器学习的能力,能够通过大量样本的学习来优化路径规划结果。
深度强化学习在机器人路径规划方面的应用,已经取得了显著的进展。
除了上述算法,每种场景下也会有特定的路径规划方式。
例如,为了满足仓库视觉引导机器人的路径寻找需求,基于深度学习的路径规划算法登上舞台。
该算法通过预测未来的障碍物位置,预先安排路径,实现加速路径偏移和规避障碍物的目标。
机器人路径规划技术研究与应用引言:随着科技的快速发展,机器人应用范围越来越广泛。
作为一种自动化设备,机器人需要具备智能决策能力,以在不同环境中自主实现任务。
而路径规划技术作为机器人智能决策的核心之一,对于机器人的运动、导航以及任务执行等方面至关重要。
本文将对机器人路径规划技术进行研究与探讨,并重点介绍其在实际应用中的应用。
一、路径规划技术的概念和基本原理路径规划是指在给定的环境中,通过合理的算法和策略,找到机器人从起点到目标点的最佳路径。
路径规划技术的基本原理包括:1. 环境建模:将机器人所处的环境建立数学模型,包括地图信息、障碍物位置等。
2. 位置定位:通过传感器等手段获取机器人的位置信息,以便进行准确的路径规划。
3. 路径搜索:基于环境模型和机器人当前位置,通过搜索算法找到从起点到目标点的最佳路径。
4. 路径优化:对搜索得到的路径进行优化,使得路径更加合理、高效。
二、常用的路径规划算法1. A*算法:A*算法是一种广泛应用的启发式搜索算法,其通过估计从当前位置到目标点的代价函数,实现高效的路径搜索。
2. Dijkstra算法:Dijkstra算法是一种经典的图搜索算法,它通过计算从起点到各点的最短距离,实现路径的规划。
3. RRT算法:RRT(Rapidly-exploring Random Tree)算法是一种适用于有动态障碍物的路径规划算法,其通过随机生成树状结构,实现路径的搜索与规划。
三、机器人路径规划技术的应用领域1. 工业自动化:在工业生产线上,机器人需要自主规划路径以完成各种任务,如零件搬运、组装等。
路径规划技术可优化机器人的运动轨迹,提高生产效率。
2. 物流仓储:在物流仓储领域,机器人可以代替人工搬运货物,路径规划技术可以帮助机器人快速、准确地完成货物的分拣、装载、储存等任务。
3. 家庭服务:在家庭服务机器人的开发中,路径规划技术能够帮助机器人避开障碍物,安全、高效地完成家务任务,如清洁、照料等。
6自由度机器人机械结构设计及路径规划摘要近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获得应用。
我国在机器人的研究和应用方面与工业化国家相比还有一定的差距,因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是有现实意义的。
典型的工业机器人例如焊接机器人、喷漆机器人、装配机器人等大多是固定在生产线或加工设备旁边作业的,本论文作者在参考大量文献资料的基础上,结合任务书的要求,设计了一种小型的实现移动的六自由度串联机器人。
首先,作者针对机器人的设计要求提出了多个方案,对其进行分析比较,选择其中最优的方案进行了结构设计;同时进行了运动学分析,用D- H 方法建立了坐标变换矩阵,推算了运动方程的正、逆解。
机器人广泛应用于工业、农业、医疗及家庭生活中,工业机器人主要应用领域有弧焊、点焊、装配、搬运、喷漆、检测、码垛、研磨抛光和激光加工等复杂作业。
总之,工业机器人的多领域广泛应用,其发展前景广阔。
关键词:机器人关节,运动学分析,工业机器人,自由度CONSTRUCTION DESIGN、KINEMATICS ANALYSIS OF SIX DEGREE OF FREEDOM ROBOTABSTRACTIn the past twenty years, the robot technology has been developed greatly and used in many different fields. There is a large gap between our country and the developed countries in research and application of the robot technology so that there will be a great value to study , design and applied different kinds of robots, especially industrial robots.Most typical industrial robots such as welding robot, painting robot and assembly robot are all fixed on the product line or near the machining equipment when they are working. Based on larger number of relative literatures and combined with the need of project, the author have designed a kind of small-size serial robot with 6 degree of freedom which can be fixed on the AGV to construct a mobile robot.First of all, several kinds of schemes were proposed according to the design demand. The best scheme was chosen after analysis and comparing and the structure was designed. At same time, The kinematics analysis was conducted, coordinate transformation matrix using D - H method was set up, and the kinematics equation direct solution and inverse solution was deduced, robots are widely used in industry, agriculture, medical and family life, the main application areas of industrial robot are complex operations includes welding, spot welding, assembly, handling, painting, inspection, palletizing, grinding polishing and Laser processing etc. In one word, the development prospects of widely used in many fields of industrial robots are broad.KEY WORDS:Robot joints,Kinematics Analysis,Industrial robot,Degree of freedom.目录前言 (1)第1章工业机器人介绍 (2)§1.1工业机器人概述. (2)§1.2 工业机器人的驱动方式 (3)§1.3 工业机器人的分类. (3)第2章工业机器人结构方案确定 (4)§2.1机器人自由度分配和手臂手腕构形 (4)§2.2传动系统布置 (5)§2.3方案描述 (6)第3章机械设计部分 (8)§3.1底座旋转台设计. (8)§3.1.1 电机选择...................................错误!未定义书签。
机器人路径规划算法研究与优化引言:随着科技的飞速发展,机器人在现代社会中扮演着越来越重要的角色。
机器人能够完成人类不能或不愿意执行的任务,并且在生产、医疗、军事等领域发挥着重要作用。
而机器人的路径规划算法则是使机器人能够自主决策行动的关键。
本文将探讨机器人路径规划算法的研究与优化。
第一部分:机器人路径规划概述在机器人进行任务执行时,路径规划是指确定机器人在环境中行进的路径,以在给定约束条件下实现其目标。
路径规划可以分为全局路径规划和局部路径规划两个阶段。
全局路径规划是在机器人初始位置和目标位置之间寻找一条最优路径,而局部路径规划则是在行驶过程中实时避免障碍物的干扰。
第二部分:常用的机器人路径规划算法1. Dijkstra算法:Dijkstra算法是一种常用的全局路径规划算法,通过计算图上的最短路径来确定机器人的运动规划策略。
该算法比较适用于无障碍物的环境,但在存在障碍物的情况下效果不好。
2. A*算法:A*算法是另一种常见的全局路径规划算法,通过权衡已走路径的代价和目标位置的启发函数,找到一条最短路径。
A*算法相比于Dijkstra算法,在存在障碍物的环境中具有更好的效果。
3. 动态窗口法:动态窗口法是一种常用的局部路径规划算法,基于机器人的运动动力学特性,利用窗口策略实现路径规划。
该算法可以快速响应环境的变化并避免障碍物。
第三部分:机器人路径规划算法的优化1. 启发式搜索方法:启发式搜索方法利用启发函数对路径进行评估和选择,从而找到更优的路径。
通过引入启发式搜索方法,可以提高机器人的路径规划精度和效率。
2. 遗传算法:遗传算法是一种模拟生物进化过程的优化方法,在路径规划中也得到了广泛应用。
通过优化遗传算法的参数设置,可以提高机器人路径规划的全局优化能力。
3. 智能学习方法:智能学习方法基于机器学习技术,通过学习环境和历史路径数据,让机器人能够主动选择更优的路径。
这种方法需要大量的数据支持,但在复杂环境下具有更好的适应性和智能性。
机器人路径规划算法研究随着人工智能和自动化技术的飞速发展,机器人在各种领域的应用越来越广泛。
而机器人的移动路径规划是其中一个重要的问题。
路径规划是指在给定的环境中,通过算法确定机器人如何从起始位置到达目标位置,同时避开障碍物和优化路径。
本文将探讨机器人路径规划算法的研究。
路径规划算法主要分为全局路径规划和局部路径规划。
全局路径规划是指在整个环境中搜索一条从起始位置到目标位置的最优路径。
而局部路径规划则是在机器人行进过程中根据实时的传感器信息调整机器人的移动方向。
全局路径规划算法通常具有较高的计算复杂度,但可以找到最短路径。
而局部路径规划算法则侧重于快速适应环境变化。
最常见的全局路径规划算法之一是A*算法。
A*算法基于启发式搜索,通过综合考虑路径代价和启发函数,找到一个较优的路径。
启发函数可以帮助A*算法快速搜索,减少计算复杂度。
然而,A*算法可能会因为环境的复杂性和障碍物的多样性而导致搜索失败。
因此,研究者们提出了许多改进的路径规划算法。
其中,D*算法是改进的一种路径规划算法。
D*算法使用了局部路径规划思想,将全局路径规划问题分解为多个局部路径规划子问题。
D*算法先根据环境中存在的障碍物信息计算出初始路径,然后根据实时的传感器信息进行迭代优化。
D*算法在遇到环境变化时可以快速做出响应,并通过迭代优化获得更加准确的路径。
然而,D*算法仍然有局限性,对于复杂环境的处理仍然有待改进。
近年来,深度学习的发展也对路径规划算法带来了新的突破。
深度学习能够从大量的数据中学习规则和特征,因此可以在路径规划中发挥重要作用。
例如,可以使用卷积神经网络(CNN)对环境中的障碍物进行识别,并将其纳入路径规划算法中。
深度学习的引入大大增加了路径规划算法的准确性和鲁棒性。
然而,深度学习也面临着数据集标注困难和计算复杂度高的挑战。
除了全局路径规划算法和局部路径规划算法外,还有许多其他的路径规划算法值得研究。
例如,基于遗传算法的路径规划算法,通过模拟进化过程寻找最优路径。
1.自主机器人近距离操作运动规划体系在研究自主运动规划问题之前,首先需建立相对较为完整的自主运动规划体系,再由该体系作为指导,对自主运动规划的各项具体问题进行深入研究。
本节将根据自主机器人的思维方式、运动形式、任务行为等特点,建立与之相适应的自主运动规划体系。
并按照机器人的数量与规模,将自主运动规划分为单个机器人的运动规划与多机器人协同运动规划两类规划体系。
1.1单个自主机器人的规划体系运动规划系统是自主控制系统中主控单元的核心部分,因此有必要先研究自主控制系统和其主控单元的体系结构问题。
自主控制技术研究至今,先后出现了多种体系结构形式,目前被广泛应用于实践的是分布式体系结构,其各个功能模块作为相对独立的单元参与整个体系。
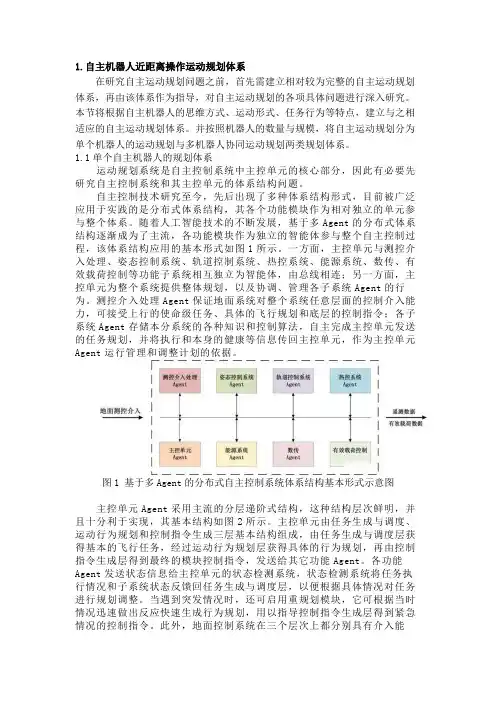
随着人工智能技术的不断发展,基于多Agent的分布式体系结构逐渐成为了主流,各功能模块作为独立的智能体参与整个自主控制过程,该体系结构应用的基本形式如图1所示。
一方面,主控单元与测控介入处理、姿态控制系统、轨道控制系统、热控系统、能源系统、数传、有效载荷控制等功能子系统相互独立为智能体,由总线相连;另一方面,主控单元为整个系统提供整体规划,以及协调、管理各子系统Agent的行为。
测控介入处理Agent保证地面系统对整个系统任意层面的控制介入能力,可接受上行的使命级任务、具体的飞行规划和底层的控制指令;各子系统Agent存储本分系统的各种知识和控制算法,自主完成主控单元发送的任务规划,并将执行和本身的健康等信息传回主控单元,作为主控单元Agent运行管理和调整计划的依据。
图1 基于多Agent的分布式自主控制系统体系结构基本形式示意图主控单元Agent采用主流的分层递阶式结构,这种结构层次鲜明,并且十分利于实现,其基本结构如图2所示。
主控单元由任务生成与调度、运动行为规划和控制指令生成三层基本结构组成,由任务生成与调度层获得基本的飞行任务,经过运动行为规划层获得具体的行为规划,再由控制指令生成层得到最终的模块控制指令,发送给其它功能Agent。
机器人路径规划与避障算法设计随着人工智能技术的不断发展,机器人在日常生活、工业生产等领域的应用越来越广泛。
机器人的路径规划与避障算法设计是机器人导航和避障能力的关键,对机器人的性能和安全性有着重要影响。
本文将介绍机器人路径规划和避障算法的基本概念和设计方法,并探讨其在实际应用中的一些关键问题。
1. 机器人路径规划的基本概念机器人路径规划是指在已知环境中确定机器人从起点到目标位置的路径。
机器人路径规划可以分为全局路径规划和局部路径规划两个阶段。
全局路径规划是在静态地图中进行的,目标是找到机器人从起点到目标位置的最优路径。
而局部路径规划是在动态环境中进行的,主要用来调整机器人在当前位置附近的移动。
2. 机器人路径规划的方法机器人路径规划的方法可以分为基于搜索的方法和基于优化的方法两大类。
基于搜索的方法主要有A*算法、Dijkstra算法和广度优先搜索算法等。
这些算法通过遍历地图搜索最短路径,可以有效地解决机器人在静态环境中的路径规划问题。
而基于优化的方法则是通过建立数学模型和优化算法,来寻找机器人的最优路径。
其中最著名的方法是动态规划和贪心算法。
3. 机器人避障算法的基本概念机器人避障算法是指在未知或动态环境中,根据机器人传感器获取的信息来规避障碍物,以保证机器人的安全运行。
机器人避障算法可以分为基于机器人模型和基于传感器的方法两大类。
基于机器人模型的方法通过构建机器人的碰撞模型和环境模型,来判断机器人与障碍物之间的关系,并进行路径规划。
而基于传感器的方法则是通过机器人的传感器获取障碍物信息,以决策机器人的移动方向。
4. 机器人避障算法的方法机器人避障算法的方法可以分为静态避障和动态避障两类。
静态避障是指处理静止障碍物,如墙壁、家具等。
常用的方法有基于几何模型的避障算法和基于图像处理的避障算法。
动态避障是指处理运动障碍物,如人、其他机器人等。
常用的方法有基于激光雷达的避障算法和基于视觉跟踪的避障算法。
机器人路径规划算法研究与应用导言:机器人技术的发展已经在多个领域展现出巨大的潜力和应用空间。
机器人的移动路径规划是其中关键的一环,它决定了机器人能否高效地完成特定任务以及如何避开障碍物和优化运动路径。
为了实现智能机器人的自主行动能力,研究人员积极开发各种路径规划算法,在各种复杂环境下进行多种应用。
一、概述:机器人路径规划算法是指通过计算机对机器人运动进行规划和控制的技术。
该算法的核心目标是在遵循运动规则和避开障碍物的前提下,找到最优或次优的运动路径。
路径规划算法主要分为全局路径规划算法和局部路径规划算法两大类。
全局路径规划算法通常是在地图上进行的,它将地图分为离散的网格或节点,根据启发式搜索算法(如A*算法、Dijkstra算法)找到一条从起点到终点的最优路径。
而局部路径规划算法则侧重预测和响应机器人周围的动态环境,以保证在实时动态环境中的安全行驶。
二、全局路径规划算法:1. A*算法:A*算法是一种启发式搜索算法,它在全局路径规划中应用广泛。
该算法通过计算每个节点的代价函数综合考虑节点的移动代价和启发式信息,以确定前往终点的最优路径。
A*算法的优点是有效性和综合性,但对于大规模的地图搜索,其计算量较大。
2. Dijkstra算法:Dijkstra算法是一种基于图论的全局路径规划算法。
它通过计算每个节点的最短路径和距离来确定最优路径。
与A*算法相比,Dijkstra算法更加简单和直接,适用于小规模地图的路径规划。
3. 遗传算法:遗传算法在全局路径规划中也有一定的应用。
通过将候选路径表示为染色体,并使用选择、交叉和变异等遗传操作方式来寻找最优路径。
遗传算法的优点在于可以在复杂环境下进行路径规划,并具有较好的鲁棒性和自适应性。
三、局部路径规划算法:1. 基于速度障碍的方法:基于速度障碍的方法通过预测机器人周围的动态环境来生成最佳路径。
该方法将障碍物视为与机器人运动速度相关的区域,通过调整机器人的速度和方向来避免碰撞,并保证机器人的安全行驶。
基于人工智能的机器人路径规划研究第一章:引言随着人工智能技术的飞速发展,机器人在各个领域中的应用越来越广泛。
机器人的路径规划是其中一个重要的研究领域,通过合理规划机器人的移动路径,可以实现高效、快速、安全的机器人运动。
本文将重点探讨基于人工智能的机器人路径规划研究。
第二章:机器人路径规划概述机器人路径规划是指为机器人找到一条从起点到终点的最优路径的过程。
最优路径可以根据不同的需求进行定义,例如最短路径、最快路径或者最安全路径等。
路径规划的主要挑战是处理环境的不确定性和复杂性,因为机器人需要考虑到环境中的障碍物、不同的地形以及其他机器人等因素。
第三章:常用的路径规划算法在机器人路径规划领域,有许多经典的算法得到了广泛应用。
其中最著名的算法包括Dijkstra算法、A*算法、RRT算法等。
Dijkstra算法通过计算出起点到其他所有点的最短距离,从而找到最短路径。
A*算法在Dijkstra算法的基础上引入了启发式函数,通过估计到目标点的距离来优先探索离目标点更近的路径。
RRT算法是一种随机采样的路径规划算法,通过不断生长树来逐渐接近终点。
第四章:基于人工智能的路径规划方法传统的路径规划算法在处理复杂、动态的环境中效果有限,因此基于人工智能的路径规划方法得到了更广泛的关注。
深度学习技术在路径规划中发挥着重要作用。
通过将环境信息输入神经网络,可以学习出较优的路径规划策略。
此外,强化学习技术也可以用于路径规划,机器人通过不断与环境交互来调整自身的策略,逐步优化路径规划效果。
第五章:机器人路径规划应用案例机器人路径规划已经在许多领域得到了成功的应用。
例如,在工业生产中,机器人需要在车间内无碰撞地移动,在医院中,机器人需要避开走廊上的障碍物,以及在户外环境中,机器人需要寻找到店铺周围最短的送货路径等。
这些应用案例证明了机器人路径规划的重要性及其广泛的应用前景。
第六章:机器人路径规划的挑战与展望尽管机器人路径规划取得了许多进展,但仍然存在一些挑战。
使用深度强化学习进行机器人路径规划深度强化学习(Deep Reinforcement Learning,DRL)是指通过结合深度学习和强化学习的方法,使机器能够从环境中学习,并根据学习到的知识做出决策。
机器人路径规划是指机器人在给定目标点和环境地图的情况下,找到一条最优路径以到达目标点。
本文将介绍使用深度强化学习进行机器人路径规划的方法和应用。
一、深度强化学习概述深度强化学习是深度学习和强化学习的结合,其主要思想是通过神经网络来学习状态和动作之间的映射关系,实现智能决策。
深度强化学习中的核心是强化学习算法,如Q-Learning、DQN等。
通过不断与环境交互,机器能够从反馈中学习,逐步改进其行为策略。
二、机器人路径规划问题机器人路径规划问题是指机器人在给定起点和终点的情况下,通过选择合适的路径来到达目标点。
传统的路径规划方法如A*算法、Dijkstra算法等,通过搜索算法来找到最优路径。
然而,在复杂的环境中,传统方法往往无法高效地解决路径规划问题。
三、深度强化学习在机器人路径规划中的应用使用深度强化学习进行机器人路径规划可以有效解决传统方法的局限性。
首先,通过使用深度神经网络来学习状态和动作之间的映射,机器人能够更好地从环境中提取特征和规律。
其次,使用强化学习算法训练机器人的决策网络,可以使机器人根据不同的环境变化做出更加灵活和智能的决策。
四、深度强化学习在机器人路径规划中的具体方法在机器人路径规划中,可以使用深度强化学习中的DQN算法来实现路径的学习和决策。
首先,构建网络结构,将环境状态作为输入,输出对应的路径决策。
然后,通过与环境交互,进行路径的训练和优化。
最后,使用训练好的网络进行路径规划,机器人可以根据当前状态选择最优路径。
五、深度强化学习在机器人路径规划中的优势和挑战深度强化学习在机器人路径规划中具有以下优势:(1)能够处理复杂环境,适应各种场景;(2)能够根据不同的状态作出智能决策;(3)能够通过与环境的交互进行快速学习。
机器人路径规划系统的设计与实现在当今的高科技时代,机器人正在被越来越广泛地运用在生产、医疗、教育、安防等各个领域。
机器人能够自主工作、运用感知、运动控制技术,提高生产效率和智能化水平,为我们带来了极大的便利和价值。
然而,机器人的行动和运动需要一定的规划和控制,特别是在狭小的环境中。
这就需要一个可靠的路径规划系统来解决这个问题。
本文将基于此,详细讨论机器人路径规划系统的设计和实现。
一、机器人的路径规划概述机器人的路径规划是指在机器人活动区域内,通过建立地图、感知环境、评价选路和运动控制等技术手段,使机器人能够自动计算出到达指定目标点的最优路径,并按照该路径进行运动控制。
机器人的路径规划主要包括以下几个方面的问题:1、感知环境:机器人需要通过高精度的传感器获取当前环境的相关信息,例如周围物体的位置、形状、大小和距离等相关外在因素。
2、地图建立:通过传感器、激光雷达或其他扫描设备等硬件设备对当前环境进行扫描,建立地图,并构建地图的拓扑结构。
该地图既可以是二维的,也可以是三维的。
3、路径搜索:基于地图信息,从起点到终点中找出一条最短或最优的路径进行导航。
路径搜索是整个路径规划中最核心的技术环节,很难实现最优路径的计算。
4、运动控制:机器人需要通过自主操作、跟踪设备以及地图等信息开展行动控制,并沿着规划好的路径进行运动。
可采用传统运动控制方法,也可以借助机器人学、深度学习等领域的技术手段。
二、机器人路径规划算法机器人路径规划算法是整个系统的核心,其性能直接影响到机器人在环境中移动的效果和效率。
目前主流的机器人路径规划算法可分为三类:1、离线计算路径规划:通过事先计算路径坐标,实现机器人对路径的实时控制。
该方法的优点是计算量小、精度高、结果稳定,适用于静态环境,但缺点是不适用于动态环境,更新低效。
2、在线计算路径规划:每次机器人行驶时,都通过实时感知和计算环境信息,并实时计算最新的路径,然后控制机器人沿着路径行驶。
机器人路径规划机器人路径规划摘要:机器人路径规划是机器人技术的重要分支之一,路径规划技术的研究是研究机器人技术不可或缺的技术之一。
本文首先介绍了当前研究人员热衷的ROS 系统是如何进行路径规划的,接着论述了作为群智能算法的蚁群算法应用于机器人的路径规划中。
研究表明,可以将蚁群算法和ROS系统结合,进一步的进行机器人的路径规划。
关键词:路径规划,ROS系统,蚁群算法,机器人1.引言智能移动机器人技术是机器人技术的重要组成部分,应用前景十分广阔:工业,农业,国防,医疗,以及服务业等[1]。
文献提出,未来数年内,中国服务机器人发展将超过传统的工业机器人[2],机器人路径规划技术是服务机器人研究的核心内容之一[3]。
可见,研究机器人的路径规划问题十分必要。
随着机器人领域的快速发展和复杂化,代码的复用性和模块化的需求原来越强烈,而已有的开源机器人系统又不能很好的适应需求。
2010年Willow Garage 公司发布了开源机器人操作系统ROS(robot operating system),很快在机器人研究领域展开了学习和使用ROS 的热潮。
ROS系统是起源于2007年斯坦福大学人工智能实验室的项目与机器人技术公司Willow Garage的个人机器人项目(Personal Robots Program)之间的合作,2008年之后就由Willow Garage来进行推动。
ROS的运行架构是一种使用ROS通信模块实现模块间P2P 的松耦合的网络连接的处理架构,它执行若干种类型的通讯,包括基于服务的同步RPC(远程过程调用)通讯、基于T opic的异步数据流通讯,还有参数服务器上的数据存储。
ROS系统以其独特优点引起了研究人员的兴趣。
近年来,各国学者致力于机器人路径规划的研究且取得了相当丰硕的研究成果。
目前已有多种算法用于规划机器人的路径,文献【4】将其主要分为经典方法和进化算法等。
人工智能技术是近些年来新兴的技术,有着传统方法不具有的优点,它使得移动机器人在理论上拥有了一定的“智能”。