平面四杆机构结构设计
- 格式:ppt
- 大小:1.20 MB
- 文档页数:32


第8章第5讲平面四杆机构的设计——解析法平面四杆机构是机械工程中常用的一种机构,它由4个连接杆组成,通过连接杆与铰链的连接方式,能够实现不同形式的运动。
平面四杆机构的设计可以采用解析法,该方法通过解析机构的运动学性质和机构参数,来确定机构的设计参数和结构尺寸。
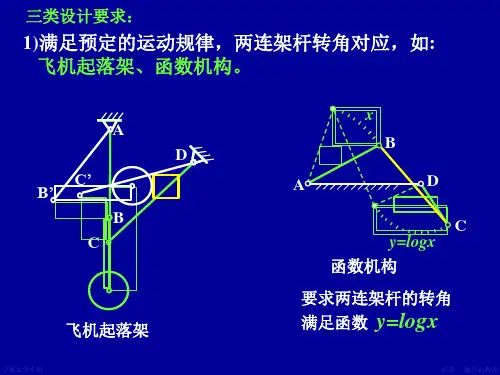
在平面四杆机构的解析法设计中,首先需要确定机构的运动类型。
根据机构的运动要求和工作环境,可以选择不同的运动类型,如平行移动、旋转、复杂曲线轨迹等。
运动类型的选择将对机构的结构设计和参数确定产生重要影响。
接下来,需要确定机构的工作原理和结构特点。
根据机构的运动类型,可以选择不同的结构形式,如平行四杆机构、向心四杆机构、菱形四杆机构等。
不同的结构形式具有不同的运动学特性和工作原理,需要根据实际需求进行选择。
确定机构的杆件长度和角度。
在机构设计中,杆件的长度和角度是关键的设计参数。
杆件的长度决定了机构的尺寸和工作范围,而杆件的角度决定了机构的运动轨迹和运动特性。
通过分析机构的运动学方程和几何方程,可以确定机构的杆件长度和角度。
确定机构的铰链位置。
铰链的位置决定了杆件之间的连接方式和机构的运动特性。
通过分析机构的力学平衡条件和运动学方程,可以确定机构的铰链位置,使机构能够实现所需要的运动要求。
最后,进行机构的参数优化和结构优化。
根据机构的运动学性能和工作要求,可以对机构的结构参数进行优化,使机构的运动特性更加优秀。
同时,还需要对机构的结构进行优化,提高机构的强度和刚度,确保机构在工作过程中的可靠性和稳定性。
通过解析法进行平面四杆机构的设计,可以使机构的结构和性能更加合理和可靠。
这种设计方法具有简单易行、工程实用性强的特点,是一种常用的机构设计方法。
在实际的机械设计中,可以根据具体的需求和实际情况,采用解析法进行平面四杆机构的设计,以提高机构的性能和工作效果。


德育学生在课堂上思考、讨论与分析中体会到探究学习的乐趣。
思维的碰撞产生智慧,激发课师 授教课程基础平面 四杆机构课型新授课多媒体课件、 电脑、 黑板、模型教学目标识标 知目力标 能目(1) 了解较链四杆机构的组成;(2) 掌握较链四杆机构的基本类型及应用。
(1) 能够区别较链四杆机构的基本类型;(2) 能够描述较链四杆机构结构特点和运动特点。
目标学生善于思考,培养学生的团队合作精神。
教学重点教学难点较链四杆机构的基本类型、应用。
较链四杆机构的结构特点和运动特点。
(1)专业能力需求:学牛在顶岗实习和毕业后将进行各种机械操作岗位,企业员工需要具有①分析机械功学情分析能、动作、工作原理及操作一般机械的能力;②自学能力。
⑵学习态度分析:学生来自城镇,对机械并不陌生,愿意学习专业课,特别是实践技能性强的课程。
⑶ 学习基础分析:①“绪论”学习,学生掌握了机械、机器、机构、零件等专业基础知识;②“构件、运动副与平面机构”知识点的学习,为本节课“平面四杆机构”的学习奠定了基础。
教学方法(1)讲授法(2)实物演示法(3)讲练结合法(4)比较法(5)探究法教学过程组织教学引入新课师生活动教学说明教学目标教学时间师生问好情就叠欣赏图片复习提问回顾旧知准备上课锁定情景思考回答集中注意力激发兴趣知识铺垫1分钟2分钟(-)较链四杆机构的组成全部用转动副相连的平面四杆机构。
机架固定不动连架杆一一定轴转动(曲柄:整周转动/摇杆:往复摆动)(二)较链四杆机构的类型在较链四杆机构中,按连架杆能否作整周转动,可将较链四杆机构分为:1、曲柄摇杆机构2、双曲柄机构3、双摇杆机构教师讲解师生讨论教师提问学生动脑获得结论3分钟阐述较链四杆机构的概念。
教师演示动画,与学生共同讨论分析较链四杆机构组成。
依据连架杆能否作整周运动得出较链四杆机构的三种基本类型达到知识目标(1)达到知识目标(2)3分钟1、曲柄摇杆机构①以曲柄为主动件: 教师演示投3分钟②以摇杆为主动件: 将曲柄的回转运动转换成从动杆的往复摆动搅面机等。
平面四杆机构的基本类型及应用
平面四杆机构是机械设计中常用的连杆机构之一,由于其简单可靠和使用方便,广泛应用于各种机械设备中。
平面四杆机构是由四个链杆组成的,其中至少有一个链杆是固定的。
四个链杆的联接点构成了四个运动副,包括一对转动副和一对平动副,它们通过固定的连杆来互相联系。
平面四杆机构可以实现转动或直线运动,同时可实现正、反、重复运动。
本文将主要介绍平面四杆机构的基本类型及应用。
1. 凸轮机构型平面四杆机构
凸轮机构型平面四杆机构是一种基于凸轮的平面四杆机构,由于其能够产生不同形状的凸轮运动来实现转动或直线运动,因此在机械设备中广泛应用。
例如,凸轮式压力机、凸轮式磨床、凸轮式切削机和凸轮式卷板机等机器均采用了凸轮机构型平面四杆机构。
双曲线机构型平面四杆机构是一种基于双曲线运动的平面四杆机构,由于其具有双曲线重复运动的性质,因此在多运动副平面机构中应用较为广泛。
例如,位移量较小的曲柄滑块机构,就采用了这种结构。
此外,双曲线机构型平面四杆机构还被广泛应用于推动旋转工件的机械系统中。
心轮机构型平面四杆机构是一种基于心轮的平面四杆机构,其构造相比其他机构稍微复杂,但具有较高的可靠性和灵敏度,因此被广泛应用于重要的机械装置中。
例如,用于驱动自动调焦装置、扫描仪输送装置、医院电梯系统等机器的传动装置均采用了心轮机构型平面四杆机构。
总之,平面四杆机构广泛应用于机械设计中的各个领域,包括制造业、食品加工、印刷、医疗和各种运动设备等。
不同类型的平面四杆机构各具特点,可根据使用情况和需要选择。
第三章 平面四杆机构的设计§3—1 平面连杆机构的特点、类型及应用1.1 概 述连杆机构:各构件之间用低副和刚性构件连接起来实行运动传递的机构。
如图2-1 分为平面连杆机构和空间连杆机构 。
连杆机构由连架杆,连杆和机架组成。
平面连杆机构的特点:1.2平面连杆机构的基本类型和结构特点:由于连杆机构的构件一般呈杆状,也以其构件的数量称为多杆机构。
平面杆机构是最基本最常用的连杆机构。
1.2.1 平面连杆机构的基本类型:1) 曲柄摇杆机构 2)双曲柄机构 3)双摇杆机构 1.2.2 平面连杆机构演化 1) 转动副转化为移动副 2)取不同的构件为机架 3)变换构件的形态 4)扩大转动副的尺寸§3—2 平面连杆机构的运动特性2.1平面连杆机构的运动特性:(1Grashoff 定理(简称曲柄存在条件):如图示a + d ≤b + cb ≤ d – a +c c ≤d – a + b a ≤ c a + b ≤ c + da ≤b a +c ≤ b +d a ≤ d a + d ≤ b + c在全铰链四杆机构中,如果最短杆与最长杆杆长之和小于或等于其余两杆杆长之和,则必然存在作整周转动的构件。
若不满足上述条件,即最短杆与最长杆杆长之和大于其余两杆杆长之和,则不存在作整周转动的构件。
(2)四杆机构从动件的急回特性:如图示四杆机构从动件的回程所用时间小于工作行程所用的时间,称为该机构急回特性。
急回特性用行程速比系数K 表示。
212112ϕϕ===t t v v K极位夹角θ—— 从动摇杆位于两极限位置时,原动件两位置所夹锐角。
θ越大,K 越大,急回特性越明显。
§3—3 平面连杆机构的传力特性3.1. 传动角与压力角:如图示在机构处于某一定位置时,从动件上作用力与作用点绝对速度方向所夹的锐角 α 称为压力角。
压力角的余角 γ( γ = 90°— α) 作为机构的传力特性参数,故称为传动角。