y
构件3和构件1满足以下位置关系: B
2 l2 δ
C 3
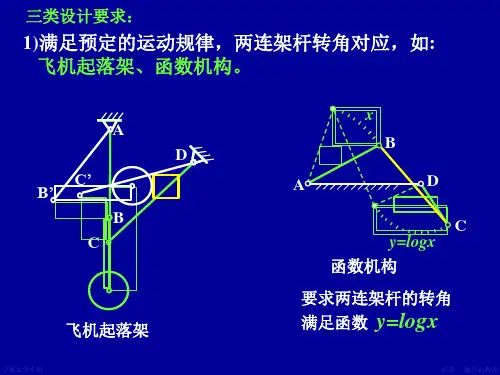
ψi=f (φi ) i =1, 2, 3…n
l11
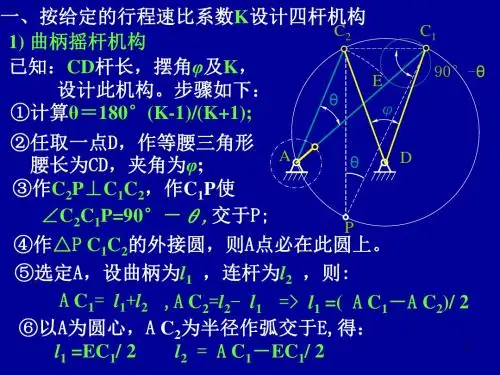
设计此四杆机构(求各构件长度)。A φ
设计:潘存云
4
l4
l3
ψ
Dx
建立坐标系,设构件长度为:l1 、l2、l3、l4
l1+l2=l3+l4 在x,y轴上投影可得:
l1 coc φ + l2 cos δ = l3 cos ψ + l4 l1 sin φ + l2 sin δ = l3 sin ψ 机构尺寸比例放大时,不影响各构件相对转角. 令: l1 =1
3.掌握按连杆二组位置、三组位置、连架杆三 组对应位置、行程速比系数设计四杆机构的原 理与方法。
宁夏大学专用
作者: 潘存云教授
3)任意取连杆长度BC,作一系源自圆弧;45))在取一一张系透列明从纸动上件取固φi定轴D,作角位移ψi 长度作同心圆弧。 B1
D
k1
ψi
D
6) 两图叠加,移动透明 A 纸,使ki落在同一圆 弧上。
C1
设计:潘存云
宁夏大学专用
作者: 潘存云教授
四、按预定的运动轨迹设计四杆机构
6
D
设计:潘存云
3 2
C
E B5 1 A
4
步进式 传送机构
C
B
A
D
设计:潘存云
E
搅拌机构
宁夏大学专用
作者: 潘存云教授
四、按预定的运动轨迹设计四杆机构
连杆作平面运动,其上各点的轨迹均不相同。
B, C点的轨迹为圆弧;
M
其余各点的轨迹为一
条 封闭曲线。