(完整版)机械设计基础平面连杆机构
- 格式:ppt
- 大小:14.55 MB
- 文档页数:98
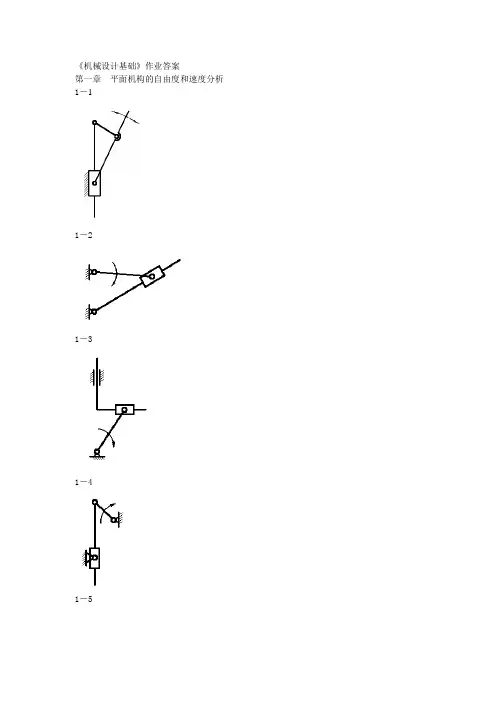
《机械设计基础》作业答案第一章平面机构的自由度和速度分析1-11-21-31-41-5自由度为:11 19211)0192(73')'2(3=--=--+⨯-⨯=--+-=FPPPnFHL或:1182632 3=-⨯-⨯=--=HLPPnF1-6自由度为11)01122(93')'2(3=--+⨯-⨯=--+-=FPPPnFHL或:11 22241112832 3=--=-⨯-⨯=--=HLPPnF1-10自由度为:1128301)221142(103')'2(3=--=--⨯+⨯-⨯=--+-=F P P P n F H L或: 122427211229323=--=⨯-⨯-⨯=--=HL P P n F1-1122424323=-⨯-⨯=--=HL P P n F1-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比。
1334313141P P P P ⨯=⨯ωω11314133431==P P ω1-14:求出题1-14图正切机构的全部瞬心。
设s rad /101=ω,求构件3的速度3v 。
s mm P P v v P /20002001013141133=⨯===ω1-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比21/ωω。
构件1、2的瞬心为P 12P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心1224212141P P P P ⨯=⨯ωω121214122421r P P ==ω 1-16:题1-16图所示曲柄滑块机构,已知:s mm l AB /100=,s mm l BC /250=,s rad /101=ω,求机构全部瞬心、滑块速度3v 和连杆角速度2ω。
在三角形ABC 中,BCA AB BC∠=sin 45sin 0,52sin =∠BCA ,523cos =∠BCA , 045sin sin BCABC AC=∠,mm AC 7.310≈s mm BCA AC P P v v P /565.916tan 1013141133≈∠⨯===ω1224212141P P P P ωω=s rad AC P P P P /9.21002101001122412142≈-⨯==ωω1-17:题1-17图所示平底摆动从动件凸轮1为半径20=r 的圆盘,圆盘中心C 与凸轮回转中心的距离mm l AC 15=,mm l AB 90=,s rad /101=ω,求00=θ和0180=θ时,从动件角速度2ω的数值和方向。
机械设计基础平面连杆机构1. 介绍平面连杆机构是机械设计中常见的一种机械结构,由若干杆件组成并通过铰链连接。
这种机构广泛应用于各种机械装置和系统中,如发动机、机械手等。
平面连杆机构的设计目标是通过合理配置连杆的长度和铰链位置来实现特定的运动,使它能够完成所需的工作。
在设计过程中,需要考虑机构的稳定性、刚度、运动路径等因素,以确保机构能够正常运行并满足设计要求。
本文将介绍平面连杆机构的基本原理、设计要点和常见应用实例。
2. 基本原理平面连杆机构的基本原理是利用杆件的长度和铰链的位置,通过特定的连杆结构来实现机构的运动。
2.1 连杆连杆是平面连杆机构中的主要组成部分,通常由刚性材料制成。
连杆通过铰链连接在一起,形成一个闭合的结构。
连杆的长度和形状对机构的运动特性有重要影响。
常见的连杆形状有直杆、曲杆和弧杆等。
在设计时,需要根据具体的运动要求和空间限制选择适当的连杆形状和长度。
2.2 铰链铰链是连杆机构中的连接件,用于连接连杆并允许相对运动。
铰链通常由轴和轴承组成,能够实现转动或滑动运动。
铰链的位置对机构的运动轨迹和运动范围有决定性影响。
在设计时,需要合理选择铰链的位置和类型,以满足设计要求。
3. 设计要点3.1 运动要求在设计平面连杆机构时,首先需要明确机构的运动要求。
例如,需要确定机构的运动类型(旋转、直线、滑动等)、运动范围、速度和加速度等。
这些要求将指导后续的连杆和铰链的设计。
3.2 连杆长度连杆的长度直接决定机构的运动幅度和工作空间。
在设计时,需要根据运动要求和空间限制选择合适的连杆长度。
较短的连杆长度可提高机构的刚度和稳定性,但限制了运动范围;较长的连杆长度可以实现更大的运动幅度,但可能会导致机构不稳定。
3.3 铰链位置铰链的位置是机构设计中的关键因素之一,它直接影响机构的运动轨迹和运动范围。
在选择铰链位置时,需要考虑到机构的运动要求、连杆长度以及其他约束条件,以实现所需的运动轨迹。
3.4 负载和刚度在设计平面连杆机构时,需要考虑机构受到的负载和所需的刚度。
平面机构的自由度和速度分析一、复习思考题1、什么是运动副?运动副的作用是什么?什么是高副?什么是低副?2、平面机构中的低副和高副各引入几个约束?3、机构自由度数和原动件数之间具有什么关系?4、用机构运动简图表示你家中的缝纫机的踏板机构。
5、计算平面机构自由度时,应注意什么问题?二、填空题1、运动副是指能使两构件之间既保持接触。
而又能产生一定形式相对运动的。
2、由于组成运动副中两构件之间的形式不同,运动副分为高副和低副。
3、运动副的两构件之间,接触形式有接触,接触和接触三种。
4、两构件之间作接触的运动副,叫低副。
5、两构件之间作或接触的运动副,叫高副。
6、回转副的两构件之间,在接触处只允许孔的轴心线作相对转动。
7、移动副的两构件之间,在接触处只允许按方向作相对移动。
8、带动其他构件的构件,叫原动件。
9、在原动件的带动下,作运动的构件,叫从动件。
10、低副的优点:制造和维修,单位面积压力,承载能力。
11、低副的缺点:由于是摩擦,摩擦损失比大,效率。
12、暖水瓶螺旋瓶盖的旋紧或旋开,是低副中的副在接触处的复合运动。
13、房门的开关运动,是副在接触处所允许的相对转动。
14、抽屉的拉出或推进运动,是副在接触处所允许的相对移动。
15、火车车轮在铁轨上的滚动,属于副。
三、判断题1、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()2、凡两构件直接接触,而又相互联接的都叫运动副。
()3、运动副是联接,联接也是运动副。
()4、运动副的作用,是用来限制或约束构件的自由运动的。
()5、螺栓联接是螺旋副。
()6、两构件通过内表面和外表面直接接触而组成的低副,都是回转副。
()7、组成移动副的两构件之间的接触形式,只有平面接触。
()8、两构件通过内,外表面接触,可以组成回转副,也可以组成移动副。
()9、运动副中,两构件联接形式有点、线和面三种。
()10、由于两构件间的联接形式不同,运动副分为低副和高副。
机械设计基础知识点详解绪论1、机器的特征:(1)它是人为的实物组合;(2)各实物间具有确定的相对运动;(3)能代替或减轻人类的劳动去完成有效的机械功或转换机械能。
第一章平面机构的自由度和速度分析要求:握机构的自由度计算公式,理解的基础上掌握机构确定性运动的条件,熟练掌握机构速度瞬心数的求法。
1、基本概念运动副:凡两个构件直接接触而又能产生一定相对运动的联接称为运动副。
低副:两构件通过面接触组成的运动副称为低副。
高副:两构件通过点或线接触组成的运动副称为高副。
复合较链:两个以上的构件同时在一处用回转副相联构成的回转副。
局部自由度:机构中常出现的一种与输出构件运动无关的自由度,称为局部自由度或多余自由度。
虚约束:对机构运动不起限制作用的重复约束称为虚约束或称消极约束。
瞬心:任一刚体相对另一刚体作平面运动时,具相对运动可看作是绕某一重合点的转动,该重合点称为瞬时回转中心或速度瞬心,简称瞬心。
如果两个刚体都是运动的,则其瞬心称为相对速度瞬心;如果两个刚体之一是静止的,则其瞬心称为绝对速度瞬心。
2、平面机构自由度计算作平面运动的自由构件具有三个自由度,每个低副引入两个约束,即使构件失去两个自由度;每个高副引入一个约束,使构件失去一个自由度。
计算平面机构自由度的公式:F=3n-2P L-P H机构要具有确定的运动,则机构自由度数必须与机构的原动件数目相等。
即, 机构具有确定运动的条件是F>0,且F等于原动件个数。
3、复合校链、局部自由度和虚约束(a)K个构件汇交而成的复合较链应具有(K-1)个回转副。
(b)局部自由度虽然不影响整个机构的运动,但滚子可使高副接触处的滑动摩擦变成滚动摩擦,减少磨损,所以实际机械中常有局部自由度出现。
(c)虚约束对机构运动虽不起作用,但是可以增加构件的刚性和使构件受力均衡,所以实际机械中虚约束随处可见。
4、速度瞬心如果一个机构由K个构件组成,则瞬心数目为N=K(K-1)/2瞬心位置的确定:(a)已知两重合点相对速度方向,则该两相对速度向量垂线的交点便是两构件的瞬心。