平面四杆机构及设计
- 格式:pdf
- 大小:706.59 KB
- 文档页数:99
教学设计设计思路:本次课程的主要内容:首先通过PPT图片引出本次课程的学习内容平面四杆,然后通过介绍平面四杆机构的概念,并进行详细的讲解让学生理解并记住,引出新名词曲柄摇杆概念让学生分组进行讨论研究。
教师介绍平面四杆机构的基本类型,并对每个类型讲解,列举生活中的应用实例,最后介绍四杆机构的判别方法,最后教师进行总结。
教学内容:平面四杆机构。
教学目标:知识与能力目标:1、引领学生对平面四杆机构进行学习。
2.提升学生理论知识与实际应用结合的能力。
过程与方法目标:培养学生提出问题、解决问题的能力。
情感态度与价值观目标:1.引导学生学习,调动学生学习积极性。
2.培养学生的自信心。
教学重点:平面四杆机构的组成。
教学难点:平面四杆机构的分类。
教学方法:案例教学法、分组讨论法教材准备:《机械基础》学情分析:学生在之前课时中已经学习过高副低副以及构件的概念。
教材分析:《机械基础》是中等职业教育规划新教材,本次课《键连接和销连接》选自课本第四章第一节,介绍了键和销连接功能、类型、结构形式及应用是本书重点内容之一。
为后面学习第五章构件、机械的基础知识、工作原理和基本技能等知识打好理论知识基础,在机械专业中具有不容忽视的重要的地位。
教学过程:1.首先教师通过复习之前课程学习过的高副低副以及构件的基本概念并介绍平面四杆机构的概念,提问学生生活中有哪些类型的四杆机构?让学生进行思考。
2.教师通过展示平面四杆机构的图片,让学生对于平面四杆机构有一个大致的了解,然后详细介绍每一构件。
3.教师讲解平面四杆机构的各种类型,并列举生活中的应用实例,让同学们有进一步的了解。
4.教师通过讲授法给学生讲解平面四杆机构的判别方法。
5.教师最后进行评价总结,知识建构。
教学评价:根据学生在课堂上的表现,课堂学习的氛围,师生之间的互动情况反思教学设计思路是否合理,教学内容的选择和教学过程的安排是否合理,学生是否能跟上教师的节奏,内容的转换是否突兀,讲解的内容是否符合由浅入深的教学原则,并作出相应的修改和调整。
第8章第5讲平面四杆机构的设计——解析法平面四杆机构是机械工程中常用的一种机构,它由4个连接杆组成,通过连接杆与铰链的连接方式,能够实现不同形式的运动。
平面四杆机构的设计可以采用解析法,该方法通过解析机构的运动学性质和机构参数,来确定机构的设计参数和结构尺寸。
在平面四杆机构的解析法设计中,首先需要确定机构的运动类型。
根据机构的运动要求和工作环境,可以选择不同的运动类型,如平行移动、旋转、复杂曲线轨迹等。
运动类型的选择将对机构的结构设计和参数确定产生重要影响。
接下来,需要确定机构的工作原理和结构特点。
根据机构的运动类型,可以选择不同的结构形式,如平行四杆机构、向心四杆机构、菱形四杆机构等。
不同的结构形式具有不同的运动学特性和工作原理,需要根据实际需求进行选择。
确定机构的杆件长度和角度。
在机构设计中,杆件的长度和角度是关键的设计参数。
杆件的长度决定了机构的尺寸和工作范围,而杆件的角度决定了机构的运动轨迹和运动特性。
通过分析机构的运动学方程和几何方程,可以确定机构的杆件长度和角度。
确定机构的铰链位置。
铰链的位置决定了杆件之间的连接方式和机构的运动特性。
通过分析机构的力学平衡条件和运动学方程,可以确定机构的铰链位置,使机构能够实现所需要的运动要求。
最后,进行机构的参数优化和结构优化。
根据机构的运动学性能和工作要求,可以对机构的结构参数进行优化,使机构的运动特性更加优秀。
同时,还需要对机构的结构进行优化,提高机构的强度和刚度,确保机构在工作过程中的可靠性和稳定性。
通过解析法进行平面四杆机构的设计,可以使机构的结构和性能更加合理和可靠。
这种设计方法具有简单易行、工程实用性强的特点,是一种常用的机构设计方法。
在实际的机械设计中,可以根据具体的需求和实际情况,采用解析法进行平面四杆机构的设计,以提高机构的性能和工作效果。

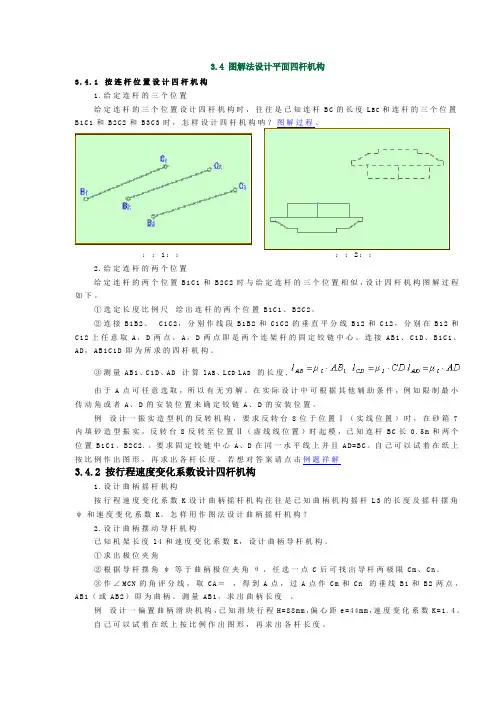
3.4 图解法设计平面四杆机构3.4.1按连杆位置设计四杆机构1.给定连杆的三个位置给定连杆的三个位置设计四杆机构时,往往是已知连杆B C的长度L B C和连杆的三个位置B1C1和B2C2和B3C3时,怎样设计四杆机构呐?图解过程。
::1::::2::2.给定连杆的两个位置给定连杆的两个位置B1C1和B2C2时与给定连杆的三个位置相似,设计四杆机构图解过程如下。
①选定长度比例尺绘出连杆的两个位置B1C1、B2C2。
②连接B1B2、C1C2,分别作线段B1B2和C1C2的垂直平分线B12和C12,分别在B12和C12上任意取A,D两点,A,D两点即是两个连架杆的固定铰链中心。
连接A B1、C1D、B1C1、A D,A B1C1D即为所求的四杆机构。
③测量A B1、C1D、A D计算l A B、L C D L A D的长度,由于A点可任意选取,所以有无穷解。
在实际设计中可根据其他辅助条件,例如限制最小传动角或者A、D的安装位置来确定铰链A、D的安装位置。
例设计一振实造型机的反转机构,要求反转台8位于位置Ⅰ(实线位置)时,在砂箱7内填砂造型振实,反转台8反转至位置Ⅱ(虚线线位置)时起模,已知连杆B C长0.5m和两个位置B1C1、B2C2.。
要求固定铰链中心A、D在同一水平线上并且A D=B C。
自己可以试着在纸上按比例作出图形,再求出各杆长度。
若想对答案请点击例题祥解3.4.2 按行程速度变化系数设计四杆机构1.设计曲柄摇杆机构按行程速度变化系数K设计曲柄摇杆机构往往是已知曲柄机构摇杆L3的长度及摇杆摆角ψ和速度变化系数K。
怎样用作图法设计曲柄摇杆机构?2.设计曲柄摆动导杆机构已知机架长度l4和速度变化系数K,设计曲柄导杆机构。
①求出极位夹角②根据导杆摆角ψ等于曲柄极位夹角θ,任选一点C后可找出导杆两极限C m、C n。
③作∠M C N的角评分线,取C A=,得到A点,过A点作C m和C n的垂线B1和B2两点,A B1(或A B2)即为曲柄。
第三章 平面四杆机构的设计§3—1 平面连杆机构的特点、类型及应用1.1 概 述连杆机构:各构件之间用低副和刚性构件连接起来实行运动传递的机构。
如图2-1 分为平面连杆机构和空间连杆机构 。
连杆机构由连架杆,连杆和机架组成。
平面连杆机构的特点:1.2平面连杆机构的基本类型和结构特点:由于连杆机构的构件一般呈杆状,也以其构件的数量称为多杆机构。
平面杆机构是最基本最常用的连杆机构。
1.2.1 平面连杆机构的基本类型:1) 曲柄摇杆机构 2)双曲柄机构 3)双摇杆机构 1.2.2 平面连杆机构演化 1) 转动副转化为移动副 2)取不同的构件为机架 3)变换构件的形态 4)扩大转动副的尺寸§3—2 平面连杆机构的运动特性2.1平面连杆机构的运动特性:(1Grashoff 定理(简称曲柄存在条件):如图示a + d ≤b + cb ≤ d – a +c c ≤d – a + b a ≤ c a + b ≤ c + da ≤b a +c ≤ b +d a ≤ d a + d ≤ b + c在全铰链四杆机构中,如果最短杆与最长杆杆长之和小于或等于其余两杆杆长之和,则必然存在作整周转动的构件。
若不满足上述条件,即最短杆与最长杆杆长之和大于其余两杆杆长之和,则不存在作整周转动的构件。
(2)四杆机构从动件的急回特性:如图示四杆机构从动件的回程所用时间小于工作行程所用的时间,称为该机构急回特性。
急回特性用行程速比系数K 表示。
212112ϕϕ===t t v v K极位夹角θ—— 从动摇杆位于两极限位置时,原动件两位置所夹锐角。
θ越大,K 越大,急回特性越明显。
§3—3 平面连杆机构的传力特性3.1. 传动角与压力角:如图示在机构处于某一定位置时,从动件上作用力与作用点绝对速度方向所夹的锐角 α 称为压力角。
压力角的余角 γ( γ = 90°— α) 作为机构的传力特性参数,故称为传动角。