四连杆机构设计
- 格式:pdf
- 大小:295.59 KB
- 文档页数:7
契贝谢夫四连杆机构的优化设计与应用
契贝谢夫四连杆机构是一种常用的机构,其由四根连杆和一个滑块组成。
契贝谢夫四连杆机构的优化设计和应用可以涉及以下方面:
1. 运动学分析和优化设计:可以通过对契贝谢夫四连杆机构的运动学特性进行分析和优化设计,以提高机构的性能。
通过优化连杆的长度和角度,可以实现所需的运动轨迹和位移,并最小化驱动力和摩擦损失。
2. 动力学分析和优化设计:可以通过对契贝谢夫四连杆机构的动力学特性进行分析和优化设计,以实现所需的力学性能。
通过优化连杆的惯量和刚度,可以提高机构的响应速度和精度,并最大限度地减小振动和动态载荷。
3. 结构强度分析和优化设计:可以通过对契贝谢夫四连杆机构的结构强度进行分析和优化设计,以确保机构在工作过程中的安全和可靠性。
通过优化连杆的剖面和材料,可以提高机构的承载能力和抗疲劳性,以应对不同工况和环境的要求。
4. 仿真和测试分析:可以通过使用计算机辅助设计和仿真软件,对契贝谢夫四连杆机构进行仿真分析,并验证优化设计的有效性。
同时,可以进行实际测试和试验,以验证优化设计参数和模型的准确性和可行性。
契贝谢夫四连杆机构在工程上有广泛的应用,例如在机械工程中可以应用于机器人、汽车发动机、传输机器和减速器等领域。
在机械设计和制造过程中,优化设计和应用契贝谢夫四连杆机构可以提高机械系统的性能、效率和可靠性。
此外,契贝谢夫四连杆机构也可以应用于模拟和教学实验,用于解决实际问题和培养学生的设计和创新能力。
给定位置设计四连杆机构的方法
设计四连杆机构的方法可以有多种,以下是其中一种常见的方法:
1. 定义机构的要求和运动轨迹:首先确定机构所需完成的任务和要求,例如运动的轨迹、速度、加速度等。
2. 确定关键点和固定点:根据所需运动轨迹,确定关键点和固定点。
关键点是机构中需要移动的点,固定点是机构中位置固定不动的点。
3. 选择连杆比例:根据机构的要求和运动轨迹,选择合适的连杆比例。
连杆比例是各连杆长度的比值,可以通过解析几何或者图解法确定。
4. 绘制初始示意图:根据选择的连杆比例和关键点,画出初始的机构示意图。
示意图可以是用平面图或者3D模型表示。
5. 进行运动分析:使用运动分析方法,如连杆运动分析、速度分析、加速度分析等,来分析机构的运动特性,确保机构满足要求。
6. 进行校核和优化:对机构的各部件进行校核和优化,确保满足强度、刚度、耐久性等方面的要求。
7. 进行机构仿真:使用计算机辅助设计软件进行机构的虚拟仿真,验证机构的运动性能和可行性。
8. 进行实物制造和测试:根据设计结果,进行实物制造和测试,检验机构的实际性能和可靠性。
以上是一个基本的设计过程,具体设计方法还会因应用领域和要求的不同而有所差异。
设计四连杆机构需要结合工程设计知识和实践经验,综合考虑运动学、动力学、材料力学等多个方面的问题。
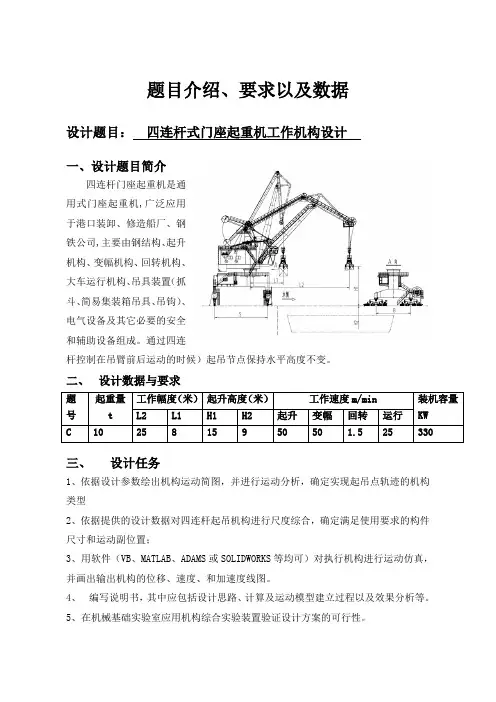
题目介绍、要求以及数据设计题目:四连杆式门座起重机工作机构设计一、设计题目简介四连杆门座起重机是通用式门座起重机,广泛应用于港口装卸、修造船厂、钢铁公司,主要由钢结构、起升机构、变幅机构、回转机构、大车运行机构、吊具装置(抓斗、简易集装箱吊具、吊钩)、电气设备及其它必要的安全和辅助设备组成。
通过四连杆控制在吊臂前后运动的时候)起吊节点保持水平高度不变。
二、设计数据与要求题号起重量t工作幅度(米)起升高度(米)工作速度m/min 装机容量KW L2 L1 H1 H2 起升变幅回转运行C 10 25 8 15 9 50 50 1.5 25 330三、设计任务1、依据设计参数绘出机构运动简图,并进行运动分析,确定实现起吊点轨迹的机构类型2、依据提供的设计数据对四连杆起吊机构进行尺度综合,确定满足使用要求的构件尺寸和运动副位置;3、用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
4、编写说明书,其中应包括设计思路、计算及运动模型建立过程以及效果分析等。
5、在机械基础实验室应用机构综合实验装置验证设计方案的可行性。
第一章、概述第一节、四连杆门座式起重机的参数起重机的主要参数有:起重量、幅度、起升高度、各机构的工作速度、工作级别及生产率。
此外,轨距、基距、外形尺寸、最大轮压、自重等也是重要参数。
1.1起重量起重量是指起重机安全工作时所允许的最大起吊货物的质量,单位为“kg”或“t”,用“Q”表示。
起重量不包括吊钩、吊环之类吊具的质量,但包括抓斗、料斗、料罐、工属具之类吊具的质量。
起重量较大的称为主起升机构或主钩,起重量较小的称为副起升机构或副钩。
副钩的起升速度较快,可以提高轻货的吊运效率。
主、副钩的起重量用一个分数来表示。
例如15/3t,表示主钩的起重量为15t,副钩的起重量为3t。
16t门座起重机的标注:16/10-9~22/30。

2.2.5 平面四杆机构的设计连杆机构的设计方法有作图法、解析法及实验法三种;其中作图法是重点。
用作图法设计四杆机构是根据设计要求及各铰链之间相对运动的几何关系,通过作图来确定四个铰链的位置。
根据不同的设计要求,作图法设计四杆机构可分为三种类型:1)按预定的连杆位置设计四杆机构。
①已知连杆 BC 的三个预定位置B 1 C 1、B 2 C 2、B 3 C 3,设计此四杆机构的实质是求固定铰链中心的位置。
此类问题可用求圆心法来解决,即作铰链 B 的各位置点连线B 1B 2、B 2B 3的中垂线,两中垂线的交点即固定铰链A 的中心。
同样,作铰链C 的各位置点连线C 1C 2、C 2 C 3的中垂线,两中垂线的交点即固定铰链 D 的中心。
若仅给定连杆 BC 的两个预定位置则设计的四杆机构有无穷多解。
②若给定固定铰链中心A 、D 的位置及连杆上标线EF 的三个预定位置,设计此四杆机构的实质是求活动铰链中心B 、C 的位置。
此类问题要用反转法求解,即把机构转化为以原连杆第一位置 E 1 F 1为机架,原机架 AD 为相对连杆,再仿上求得活动铰链 A 的三个相应位置A 、A 2’、A 3’,它们所在圆的圆心就是其相对固定铰链(实际活动铰链)B 的位置B 1,可用前述求圆心法求得。
2)按预定的两连架杆对应位置设计四杆机构。
如已知两连架杆的三组对应位置及机架长度l AD 、原动件长度l AB ,设计此四杆机构的实质是求活动铰链C 的位置。
此问题可用反转法求解,即把从动杆CD 的第一位置C 1D 看做机架,原动件AB 看做连干,求得活动铰链B 的三个相应位置B 、B 2´、B 3´,他们所在圆的圆心就是其相对固定铰链C 的位置C 1,若仅给定两连架杆的两组对应为止,则设计的四杆机构有无穷多解。
3)按给定的行程速比系数K 设计四杆机构已知行程速比系数K 及某些其他条件(如曲柄摇杆机构CD 的长度l CD 、摇杆摆角φ),设计此四杆机构的实质问题是确定曲柄的固定铰链中心A 的位置,进而定出其余三杆长度。
图解法设计平面四杆机构-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN图解法设计平面四杆机构3.4.1按连杆位置设计四杆机构1.给定连杆的三个位置给定连杆的三个位置设计四杆机构时,往往是已知连杆B C的长度L B C和连杆的三个位置B1C1和B2C2和B3C3时,怎样设计四杆机构呐图解过程。
::1::2.给定连杆的两个位置给定连杆的两个位置B1C1和B2C2时与给定连杆的三个位置相似,设计四杆机构图解过程如下。
①选定长度比例尺绘出连杆的两个位置B1C1、B2C2。
②连接B1B2、C1C2,分别作线段B1B2和C1C2的垂直平分线B12和C12,分别在B12和C12上任意取A,D两点,A,D两点即是两个连架杆的固定铰链中心。
连接A B1、C1D、B1C1、A D,A B1C1D即为所求的四杆机构。
③测量A B1、C1D、A D计算l A B、L C D L A D的长度,由于A点可任意选取,所以有无穷解。
在实际设计中可根据其他辅助条件,例如限制最小传动角或者A、D的安装位置来确定铰链A、D的安装位置。
例设计一振实造型机的反转机构,要求反转台8位于位置Ⅰ(实线位置)时,在砂箱7内填砂造型振实,反转台8反转至位置Ⅱ(虚线线位置)时起模,已知连杆B C长和两个位置B1C1、B2C2.。
要求固定铰链中心A、D在同一水平线上并且A D=B C。
自己可以试着在纸上按比例作出图形,再求出各杆长度。
若想对答案请点击例题祥解3.4.2 按行程速度变化系数设计四杆机构1.设计曲柄摇杆机构按行程速度变化系数K设计曲柄摇杆机构往往是已知曲柄机构摇杆L3的长度及摇杆摆角ψ和速度变化系数K。
怎样用作图法设计曲柄摇杆机构?2.设计曲柄摆动导杆机构已知机架长度l4和速度变化系数K,设计曲柄导杆机构。
①求出极位夹角②根据导杆摆角ψ等于曲柄极位夹角θ,任选一点C后可找出导杆两极限C m、C n。
③作∠M C N的角评分线,取C A=,得到A点,过A点作C m和C n的垂线B1和B2两点,A B1(或A B2)即为曲柄。
四连杆机构滑撑设计1. 介绍四连杆机构是一种常见的机械结构,由四个连杆组成,形成一个闭合的链条。
它的主要应用领域包括机械制造、汽车工业、航空航天等。
滑撑是四连杆机构中的一种关键部件,用于支撑和平衡机构的运动。
本文将详细介绍四连杆机构滑撑的设计原理和方法。
2. 设计原理四连杆机构滑撑的设计原理基于以下几个关键点:2.1 运动分析在设计滑撑之前,首先需要对四连杆机构的运动进行分析。
通过运动学原理,可以确定连杆的长度、角度和运动轨迹。
通过运动分析,可以确定滑撑的位置和形状,以确保其在运动过程中的稳定性和有效性。
2.2 力学分析滑撑在工作过程中需要承受一定的载荷,因此需要进行力学分析。
通过力学分析,可以确定滑撑的材料和尺寸,以满足设计要求。
同时,还需要考虑滑撑与其他部件的连接方式和固定方式,以确保其在工作过程中的安全性和可靠性。
2.3 运动优化滑撑的设计还需要进行运动优化,以提高机构的运动性能和效率。
通过优化设计,可以减小滑撑与其他部件的摩擦和阻力,降低能量损失,提高机构的运动精度和稳定性。
运动优化还可以减小滑撑的重量和体积,提高机构的整体性能。
3. 设计方法基于以上设计原理,可以采用以下方法进行滑撑的设计:3.1 运动分析方法运动分析方法主要包括几何法和向量法。
几何法是通过几何图形的构建和计算,确定连杆的长度、角度和运动轨迹。
向量法是通过向量的运算和分解,确定连杆的位置和速度。
运动分析方法可以使用计算机辅助设计软件进行模拟和计算,以提高设计的准确性和效率。
3.2 力学分析方法力学分析方法主要包括静力学和动力学分析。
静力学分析是通过平衡方程和力的平衡条件,确定滑撑的受力情况和载荷大小。
动力学分析是通过牛顿运动定律和动力学方程,确定滑撑在运动过程中的加速度和力的变化。
力学分析方法可以使用有限元分析和计算机模拟等工具进行计算和验证。
3.3 运动优化方法运动优化方法主要包括参数优化和拓扑优化。
参数优化是通过调整滑撑的尺寸和形状,使其在运动过程中的摩擦和阻力最小化。
长沙民政职业技术学院备课纸首页
第五教案
第五讲平面四连杆机构的设计方法
一、基本问题(10分钟)
1.实现预定运动规律(函数生成机构的设计)
例如:连架杆的对应位置
从动件的急回运动特性
2.实现连杆给定位置(刚体导引机构的设计)
3.实现预定运动轨迹(轨迹生成机构的设计)
方法:解析法、图解法、实验法二、用图解法设计四杆机构(75分钟)
1.设计一四杆机构,实现连杆给定位置
已知活动铰点B、C中心位置,求固定铰链A D中心位置。
实现连杆给定的三个位置
四杆机构ABiG|D为所求。
2.按给定的K值,综合曲柄摇杆机构给定 K、“、L CD L AD
曲柄摇杆机构ABCD 为所求.
L AB = H L AB =…■ L EC
=血BC =…
、小结(5分钟) 作怪L c 2 90°-e AC ?=BC+AB
3.按给定的K 、S 、e 值,设计曲柄滑块机构
若给定匚
S. e .。
3.4 图解法设计平面四杆机构3.4.1按连杆位置设计四杆机构1.给定连杆的三个位置给定连杆的三个位置设计四杆机构时,往往是已知连杆B C的长度L B C和连杆的三个位置B1C1和B2C2和B3C3时,怎样设计四杆机构呐?图解过程。
::1::::2::2.给定连杆的两个位置给定连杆的两个位置B1C1和B2C2时与给定连杆的三个位置相似,设计四杆机构图解过程如下。
①选定长度比例尺绘出连杆的两个位置B1C1、B2C2。
②连接B1B2、C1C2,分别作线段B1B2和C1C2的垂直平分线B12和C12,分别在B12和C12上任意取A,D两点,A,D两点即是两个连架杆的固定铰链中心。
连接A B1、C1D、B1C1、A D,A B1C1D即为所求的四杆机构。
③测量A B1、C1D、A D计算l A B、L C D L A D的长度,由于A点可任意选取,所以有无穷解。
在实际设计中可根据其他辅助条件,例如限制最小传动角或者A、D的安装位置来确定铰链A、D的安装位置。
例设计一振实造型机的反转机构,要求反转台8位于位置Ⅰ(实线位置)时,在砂箱7内填砂造型振实,反转台8反转至位置Ⅱ(虚线线位置)时起模,已知连杆B C长0.5m和两个位置B1C1、B2C2.。
要求固定铰链中心A、D在同一水平线上并且A D=B C。
自己可以试着在纸上按比例作出图形,再求出各杆长度。
若想对答案请点击例题祥解3.4.2 按行程速度变化系数设计四杆机构1.设计曲柄摇杆机构按行程速度变化系数K设计曲柄摇杆机构往往是已知曲柄机构摇杆L3的长度及摇杆摆角ψ和速度变化系数K。
怎样用作图法设计曲柄摇杆机构?2.设计曲柄摆动导杆机构已知机架长度l4和速度变化系数K,设计曲柄导杆机构。
①求出极位夹角②根据导杆摆角ψ等于曲柄极位夹角θ,任选一点C后可找出导杆两极限C m、C n。
③作∠M C N的角评分线,取C A=,得到A点,过A点作C m和C n的垂线B1和B2两点,A B1(或A B2)即为曲柄。
RSSR空间四连杆机构的设计应用张国柱王惠刚(常熟纺织机械厂有限公司215500)摘要RSSR空间四连杆机构随着实际应用不断变化和发展。
分析机构,用参数描述杆件,应用计算机,使机构的设计计算程序化。
结合应用使机构杆件参数的确定便捷、准确、优化,从而完成RSSR空间四连杆机构的初步设计。
关键词RSSR空间四连杆机构参数解析法机构设计1前言空间连杆机构在纺织、针织、服装等专业机械方面有着广泛的应用。
RSSR空间四连杆机构是众多空间连杆机构中的典型,具有结构紧凑、传动准确可靠等优点,并在实际应用中不断变化和发展。
随着CAD设计和程序设计的普遍应用,解析法设计连杆机构已成为首选方法,结合图解法和结构设计,可以获得准确、优化的机构参数,并使设计进程加快。
本文对夹角为90b的RSSR型空间四连杆机构的相关公式进行了引用推导,并分析说明了用参数描述杆件、推导公式、设计计算程序化的过程。
结合RSSR型空间四连杆机构在共轭凸轮式折入边装置和织带机上的设计应用过程,对RSSR型空间四连杆机构的参数化设计进行说明,通过比对分析杆件的运动规律,便捷、准确、优化地确定杆件参数,完成空间四连杆机构的初步设计。
通过CAD作图和结构设计对机构杆件的材料、截面尺寸、球面副、转动副等细节进行确认,校核机构的动力学性能,并对机构进行实验运行,从而完善机构的应用设计。
2RSSR空间四连杆机构的分析2.1RSSR空间四连杆机构图1为RSSR空间四连杆机构ABCD,AD组成机架,AB杆和CD杆在A、D点组成转动副R,连杆BC分别与AB和CD组成球面副S,点B和C各为球面副的球心。
假定AB为主动杆,CD为从动杆。
通过B和C各作平面V和U分别垂直于主动轴A 和从动轴D,两个平面的交线为ZZ。
由于首末两轴垂直交错,交角等于90b的RSSR空间四连杆机构比较常用,则如图1所示V和U平面的夹角为90b。
将平面V绕ZZ回转90b与平面U重合,得到图2。