HIWIN 四轴运动控制卡
- 格式:pdf
- 大小:786.51 KB
- 文档页数:5
工控:C#如何控制运动卡现在越来越多的非标设备使用的是运动控制卡,那什么是运动控制卡?运动控制卡是一种基于PC机及工业PC机、用于各种运动控制场合(包括位移、速度、加速度等)的上位控制单元。
所以运动控制卡的编程就需要用到高级语言,常用的有C++,,Labview,C#这几种下面高级语言以C#为例,运动控制卡以固高GT-400-G-PCI(4轴控制卡)为例常见的系统架构一控制卡组成1.控制卡控制卡需要插在PC的PCI插槽内,露出的接口CN17需要用排线和外部端子板连接运动控制卡2.端子板端子板一般装在配电盘上,用于接线,下图中左边的四个AXIS就是轴系的脉冲接口右边为IO和限位接线端子最上门的CN17需要用排线连接到PC内的运动控制卡端子板二.配置运动控制卡(固高官网下载地址:/pro_view-3.html)1.首先装好驱动程序,驱动包可以找供应商拿2.配置卡的参数安装好驱动后,打开固高配置软件,主要配置为伺服的脉冲模式,正负极限的设置,急停的设置当中细节太多这边不一一讲3.用demo控制轴运动配置好参数后,用配置软件动一下轴确定轴参数都对后才能用上位机控制轴一的配置界面轴控制三.用C#编程1.新建一个winform窗体程序,把固高的动态链接库拷贝进去(正常和供应商索取驱动还有相关资料)动态链接库还有文件2.程序内引用gts文件右击项目➡添加➡现有项➡选择刚才拷贝的文件添加完效果3.开始编程卡操作流程:初始化➡读取参数配置(就是用DEMO软件配置好的参数)➡按逻辑控制每个轴归零➡程序控制轴进行位移运动我们在新建一个GtsCard类,把gts类中提供的方法重新整理下,方便以后复用//固高运动控制卡 public class GtsCard { /// <summary> /// 初始化,加载配置,清除轴系报错/// </summary> /// <param name='cardNum'></param> /// <param name='filePath'></param> /// <param name='axis'></param> /// <returns></returns> public bool Initial(gtsCardID gtsCard, Axis[] axis) { short result; bool isOk = false; try { //channel : 打开运动控制器的方式。
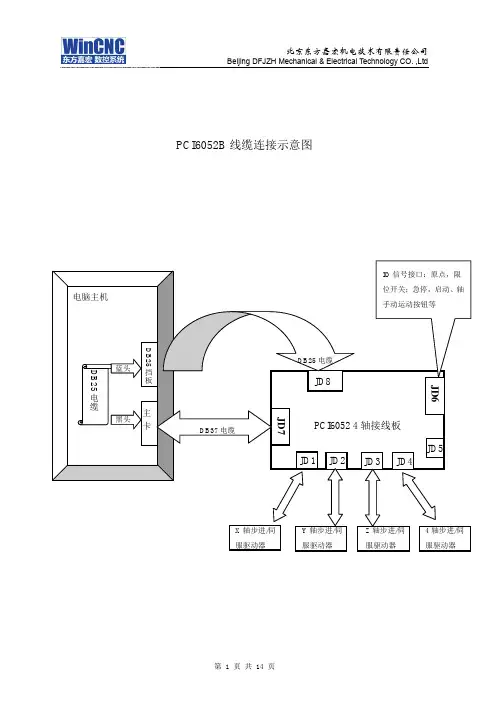
PCI6052B线缆连接示意图6052四轴端子板安装联接简明参考一、外形及尺寸(单位:mm)6052主卡外形尺寸6052四轴端子板外形尺寸二、6052四轴端子板信号接口图三、电机控制信号接线轴控信号接口JD1-JD4(DB15插头)示意图:端口定义表 管脚号 定义 功能 说明1 A- 编码器输入信号 编码器反馈信号。
当控制卡以开环模式工作时无效;当控制卡以半闭环控制模式工作时有效。
9 A+ 编码器输入信号 2 B- 编码器输入信号 10 B+ 编码器输入信号 3 Z- 编码器输入信号 11 Z+ 编码器输入信号 4 +5V +5V 电源 PC 电源 12 PLUS 轴差分脉冲输出+5 /PLUS 轴差分脉冲输出- 13 SIGN 轴差分方向输出+ 6/SIGN轴差分方向输出-15 ALM 报警输入 可接报警信号。
如:驱动器报警。
实际输入口对应:X 轴→I21(ALM0)、Y 轴→I22(ALM1)、Z 轴→I23(ALM2)、W 轴→I24(ALM3)。
参看第10页7GND报警输入地15 SVon 伺服使能信号+8 SV COM 伺服使能信号-外壳15针接头外壳(GND)15针接头(轴控信号的接头)的外壳与伺服驱动器信号线缆的屏蔽层有效连接1 控制输出信号连接方法 A )差分输出连接方法:B) 共阳极接线方法:C) 共阴极接线方法:注意:轴控信号插头的外壳与伺服驱动器信号线缆的屏蔽层有效连接,并接地。
2 伺服编码器输入连接方法当伺服编码器输出信号为差分信号时,连接方法如下:当伺服编码器输出信号为单端信号时,连接方法如下:注意:连接编码器的信号线的屏蔽层必须接地。
3 伺服使能信号连接方法控制伺服电机时,防干扰措施要做到位:1、信号线要用屏蔽电缆,屏蔽层要接地。
2、接地与共地,伺服电机与伺服电机驱动器接地与共地(参看所用《伺服电机系统说明书》),控制器与伺服电机系统共地3、伺服电机控制主电路加装噪声滤波器、浪涌吸收回路(参看所用《伺服电机系统说明书》)四、辅助编码器接口辅助编码器接口JD5(DB15插头)示意图:端口定义表如下:管脚号定义功能说明1 A+ 接编码器A+9 A- 接编码器A- (编码器单端输入可不接)2 B+ 接编码器B+10 B- 接编码器B- (编码器单端输入可不接)3 GND PC电源地11 +5V PC电源+5V 5V输出4 I25(REV) 通用输入800000(B24)12 I26(Xsel) X轴选,10000(B17)5 I27(Ysel) Y轴选,20000(B18)13 I28(Zsel) Z轴选,40000(B196 I29(Asel) 第四轴轴选,80000(B2014 I30(Multi×1) 倍率×1, 100000(B217 I31(Multi×10) 倍率×10,200000(B2215 I32(Multi×100) 倍率×100,400000(B238 GND PC电源地五、DA/PWM输出选择6052四轴端子板上有一路PWM或DA模拟量输出,通过端子板上的跳线J9、J10来选择是PWM 输出还是DA输出。
爱普生4轴机械手维修手册(实用版)目录1.爱普生 4 轴机械手简介2.维修手册的作用和重要性3.维修手册的主要内容4.维修机械手的注意事项5.结论正文一、爱普生 4 轴机械手简介爱普生 4 轴机械手是一款广泛应用于工业生产领域的自动化设备,以其精确的控制、稳定的运行和可靠的性能而受到用户的青睐。
它主要由臂、手腕、手抓和控制系统组成,能够实现在三维空间中的灵活运动,满足各种搬运、装配等作业需求。
二、维修手册的作用和重要性维修手册是针对机械手可能出现的故障和问题提供解决方案的一份重要资料,它包含了机械手的结构原理、故障诊断与排除以及日常保养维护等方面的内容。
正确使用维修手册能够有效提高机械手的运行效率和稳定性,延长其使用寿命,降低维修成本。
三、维修手册的主要内容1.机械手结构原理:详细介绍了机械手的各个组成部分及其作用,方便维修人员了解机械手的整体构造和工作原理。
2.故障诊断与排除:针对机械手可能出现的各种故障,提供了详细的故障现象、原因分析以及处理方法,帮助维修人员快速准确地诊断和解决问题。
3.日常保养维护:介绍了机械手的日常保养维护方法和注意事项,包括清洁、润滑、紧固等,以确保机械手的正常运行和延长使用寿命。
四、维修机械手的注意事项1.在维修机械手之前,必须确保电源已经切断,避免触电事故。
2.维修人员需要具备一定的专业知识和技能,以免因操作不当造成机械手的二次损坏。
3.维修过程中,应按照维修手册的指导进行,切勿随意拆卸和更换零部件。
4.维修完成后,应进行试运行,确认机械手运行正常后方可投入使用。
五、结论爱普生 4 轴机械手维修手册是保证机械手正常运行和延长使用寿命的重要资料,维修人员应认真学习并按照手册的要求进行维修和保养。
基于运动控制卡的四关节机械手臂控制系统设计一、绪论机器人技术是现代制造业不可或缺的一项技术。
本文基于运动控制卡的四关节机械手臂控制系统设计,旨在为实现机械手臂自动化控制提供可行性方案。
二、系统设计1. 系统硬件设计本系统所需的硬件主要包括四关节机械手臂、运动控制卡、步进电机和电源等。
其中,四关节机械手臂是负责完成各种工业自动化任务的主体,步进电机则是实现机械手臂动作的技术支撑,而运动控制卡则是机械手臂的数字控制核心。
具体设计如下:(1)机械手臂方案设计本系统中采用的机械手臂为四关节机械手臂,具有控制灵活、可靠性高、精度高等特点。
关节采用电机驱动,能够在不同工作场景下自由调整角度,实现不同的物体抓取、移动等功能。
(2)步进电机方案设计步进电机是一种精度高、可靠性好的电机类型,特别适合用于机器人控制系统中。
本系统中采用的步进电机二相四线式,具有卓越的控制性能,用于实现机械手臂各关节电机的控制。
(3)运动控制卡方案设计运动控制卡主要负责机械手臂的数字化精确控制,本系统中选择采用PLC型控制卡,能够更好地控制机械臂的位置、速度、加速度等。
(4)电源及配件方案设计本系统采用的电源功率为24VDC,适用于各组件电压要求,同时提供相应的配件,如闸刀、接触器、熔断器、告警灯等,以确保系统稳定性、可靠性和安全性。
2. 系统软件设计本系统采用Visual C++和PLC编程软件S7-200为开发工具,主要功能设计如下:(1)运动控制程序设计运动控制程序应具有良好的实时性和稳定性,应能够实现机械手臂的控制命令,包括位置、速度、加速度等。
程序开发需要嵌入PLC软件中进行。
(2)图形化界面设计图形化界面应当直观、简单易操作,并能够实时显示机械臂的动态,以及控制参数的变化情况。
程序开发可以采用MFC框架实现。
三、总结本文基于运动控制卡的四关节机械手臂控制系统设计,提出了系统硬件和软件设计的相关方案。
该系统设计方案能够实现机械手臂的自动化控制,具有较高的准确度和可靠性,为工业自动化生产提供了一种可行技术方案。
1.1维鸿系统的安装在安装新的维鸿前,请删除旧版本的维鸿。
删除的方法请参考程序卸载一节。
维鸿系统包括软件和运动控制卡两部分。
所以,系统的安装也分为两个阶段:软件安装和运动控制卡的安装。
总体上,请您在安装完软件之后再安装运动控制卡,这样运动控制卡的驱动程序就不需要单独安装。
所以简单以说,可以分为这样几个步骤:(1)安装维鸿软件,待安装程序提示关闭计算机后,关闭计算机。
(2)关闭计算机后,安装运动控制卡。
(3)重新启动计算机,进入Windows操作系统后,略微等待一会,待Windows自动完成配置,整个安装工作就算完成了。
(4)运行维鸿系统。
下面详细介绍其中的关键步骤。
维鸿软件安装请按照下面的步骤安装软件:(1)打开计算机电源,启动计算机,系统自动运行进入Windows操作系统。
如果你还没有安装Windows操作系统,请首先安装该操作系统。
(2)Windows操作系统启动后,注意请关闭其他正在运行的程序。
(3)解压维鸿V2.0免安装包,打开里面的dotNetFrameWork文件夹,安装dotNetFx40_Full_x86_x64.exe(4)打开维鸿V2.0文件夹,右键创建桌面快捷方式(5)双击打开桌面快捷键方式,运行维鸿。
维鸿软件驱动安装USB设备驱动支持XP、win7或win8等32位操作系统,任何一个小的错误都有可能安装驱动失败。
1. 将USB数据线连接到电脑任意USB接口,若出现新硬件向导信息提示中选“是,仅这一次(I)”选项,点击“下一步”。
在出现新硬件向导信息提示中选“从列表或指定位置安装(高级)”选项,点击“下一步”。
2. 选择“在搜索中包括这个位置(O)”选项,点击“浏览”。
3. 选择“维鸿控制设备驱动”文件夹,点击“下一步”。
4.在找到新的硬件向导对话框中选中对应的驱动,点击“下一步”(第一次安装时会自动跳过)。
5在硬件安装对话框中点击“仍然继续”。
6等待几秒后,跳出对话框后,点击“完成”。
爱普生4轴机械手维修手册(最新版)目录1.爱普生 4 轴机械手简介2.维修手册的作用和重要性3.机械手的故障排除流程4.常见故障及解决方法5.维护和保养建议6.结论正文一、爱普生 4 轴机械手简介爱普生 4 轴机械手是一款广泛应用于各种工业领域的自动化设备,以其出色的性能和稳定的运行而受到用户的青睐。
它主要由臂、手腕、手抓和控制系统组成,能够在多个轴向上进行灵活的运动,实现精确的定位和抓取。
二、维修手册的作用和重要性维修手册是机械手使用和维护过程中必不可少的参考资料,它包含了机械手的结构原理、操作方法、故障排除等重要信息。
正确地使用和维护手册,可以有效地提高机械手的运行效率和寿命,避免因故障造成的生产损失。
三、机械手的故障排除流程1.故障现象分析:根据机械手的异常表现,初步判断可能的故障原因。
2.故障部位定位:利用维修手册,针对性地进行检查,找出故障的具体部位。
3.故障原因分析:分析故障原因,可能是机械部件的损坏,也可能是操作或设置不当。
4.故障处理:根据故障原因,采取相应的处理措施,如更换损坏部件、调整操作参数等。
5.故障验证:处理完毕后,进行试验验证,确保故障已排除。
四、常见故障及解决方法1.机械手无法正常启动:检查电源线、插座和开关是否正常,如有问题则修复或更换。
2.运动轴无法正常运动:检查轴电机、驱动器和编码器是否正常,如有问题则修复或更换。
3.手抓无法正常抓取:检查手抓内部的吸盘或夹具是否损坏,如有问题则修复或更换。
4.控制系统故障:检查控制系统的硬件和软件是否正常,如有问题则修复或升级。
五、维护和保养建议1.定期检查:按照维修手册的建议,定期对机械手进行全面检查,发现问题及时处理。
2.保持清洁:保持机械手及其工作环境的清洁,防止灰尘和油污影响运行。
3.合理使用:遵循机械手的使用规范,避免超负荷运行,减少不必要的故障。
4.定期保养:按照维修手册的建议,定期对机械手进行保养,如润滑、更换易损件等。
基于PCI总线的四轴运动控制卡的研制2008-08-11 来源:中国自动化网浏览:129 摘要:本文介绍了一种采用PCI专用接口芯片PCI9052作为PCI总线与运动控制芯片MCX314as接口桥,实现4轴运动控制卡硬件设计方法。
首先给出了运动控制卡总体结构,PCI总线接口规范、局部总线接口电路、MCX314as信号接口电路。
然后,给出了PCI9052板卡ISA模式下双片选配置方法。
最后,给出了用DriverStudio开发WDM驱动程序方法。
关键词:运动控制卡; PCI9052; PCI总线; MCX314as; WDM1.引言本项目是用于华南理工与广东风华集团合作动臂式贴片机(也称拱架型贴片机)拾取/贴装头四轴控制,X,Y轴为水平面方向运动,Z轴为拾取/贴装头拾取、贴装芯片方向运动,U轴为调整芯片角度方向旋转运动[7>。
项目要求,采用MCX314as为运动控制核心,上位机只需将运动参数写入MCX314as寄存器,各种复杂运动控制,插补计算均由MCX314as完成,极大提高了运算和控制速度,PCI9052为PCI桥接口与计算机通信,完成了4轴伺服/ 步进电机控制,实现位置,速度,加速度控制和直线、圆弧插补功能。
2.运动控制卡硬件结构运动控制卡硬件结构主由PCI接口芯片PCI9052、运动控制芯片MCX314as以及相应光耦隔离、差动传输等电路组成,如图1。
其中,DB 代表数据总线,AB 代表址总线,CB代表控制总线,轴输出为四个轴输出脉冲,I/O为输入输出控制信号等。
2.1 PCI 总线接口PCI局部总线是一种独立于处理器高性能、低成本、开放型总线,它这些优点,使其到迅速普及和发展,并成为事实上微型机总线标准,嵌入式计算机和工业控制计算机方面到广泛应用。
它可分为32位数据/址复用总线和64位数据/址复用总线两种,总线速度分为最高达33MHz和66MHz两种。
数据传送速度最高可达528MB/s [2>。

1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机驱动器上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。
比如,松下是设置1V电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
深圳市博美德数控设备有限公司一八九二三七九一四五二2、接线将控制卡断电,连接控制卡与伺服驱动器之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服驱动器输出的编码器信号线(当然,电机和驱动器之间的线我认为已经接好了)。
复查接线没有错误后,电机驱动器和控制卡(以及PC)上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置深圳市博美德数控设备有限公司一八九二三七九一四五二3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这时电机应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V以下。
如果方向不一致,可以修改控制卡或电机驱动器上的参数,使其一致。
深圳市博美德数控设备有限公司一八九二三七九一四五二4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
运动控制器 用户手册 GTS 系列 4轴 V2.0© 2013 固高科技 版权所有2013.05版权申明固高科技有限公司保留所有权力固高科技有限公司(以下简称固高科技)保留在不事先通知的情况下,修改本手册中的产品和产品规格等文件的权力。
固高科技不承担由于使用本手册或本产品不当,所造成直接的、间接的、特殊的、附带的或相应产生的损失或责任。
固高科技具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或者间接地复制、制造、加工、使用本产品及其相关部分。
运动中的机器有危险!使用者有责任在机器中设计有效的出错处理和安全保护机制,固高科技没有义务或责任对由此造成的附带的或相应产生的损失负责。
联系我们固高科技(深圳)有限公司地址:深圳市高新技术产业园南区深港产学研基地西座二楼W211室电话:0755-******** 26737236 26970824 传真:0755-********电子邮件:support@网址: 固高科技(香港)有限公司地址:香港九龙观塘伟业街108号丝宝国际大厦10楼1008-09室电话:+(852) 2358-1033传真:+(852) 2719-8399电子邮件:info@网址:/前言感谢选用固高运动控制器为回报客户,我们将以品质一流的运动控制器、完善的售后服务、高效的技术支持,帮助您建立自己的控制系统。
固高产品的更多信息固高科技的网址是。
在我们的网页上可以得到更多关于公司和产品的信息,包括:公司简介、产品介绍、技术支持、产品最新发布等等。
您也可以通过电话(0755-26970817)咨询关于公司和产品的更多信息。
技术支持和售后服务您可以通过以下途径获得我们的技术支持和售后服务:电子邮件:support@;电话:0755-26970843发函至:深圳市高新技术产业园南区园深港产学研基地西座二楼W211室固高科技(深圳)有限公司邮编:518057用户手册的用途用户通过阅读本手册,能够了解GTS系列运动控制器的基本结构,正确安装运动控制器,连接控制器与电机控制系统,完成运动控制系统的基本调试。
高性能四轴运动控制卡安全操作及保养规程1. 引言高性能四轴运动控制卡是一种关键设备,用于控制四轴无人机的运动。
为了保证设备的正常工作和延长使用寿命,需要严格遵守一系列的安全操作和保养规程。
2. 安全操作规程以下是使用高性能四轴运动控制卡时需要遵守的安全操作规程:2.1 适当培训在使用高性能四轴运动控制卡之前,必须接受专业培训,了解相关操作和安全知识。
2.2 室内使用在正常情况下,高性能四轴运动控制卡应该在室内环境下进行操作。
避免在雨天、风力较大或其它恶劣的气象条件下使用。
2.3 操作人员保护在操作过程中,必须佩戴适当的防护装备,包括安全帽、手套和护目镜等。
2.4 操作平台准备在操作之前,必须确保操作平台的稳定性。
避免操作平台上有杂物或者不稳定的物体。
2.5 对应操作规范按照高性能四轴运动控制卡的操作说明书进行操作,确保所有的操作都符合规范。
2.6 操作人员技术要求操作高性能四轴运动控制卡的人员必须具备一定的技术能力和经验,以确保操作的正确性。
2.7 避免超负荷运行在使用过程中,必须避免超过高性能四轴运动控制卡的最大负荷运行。
过高的负荷可能导致设备损坏。
2.8 充分休息在连续使用高性能四轴运动控制卡一段时间后,应给予设备充分休息时间,避免过度疲劳。
3. 保养规程为了确保高性能四轴运动控制卡的正常工作和延长使用寿命,需要进行定期的保养。
3.1 清洁定期清洁高性能四轴运动控制卡的外壳和内部部件,避免灰尘和杂物积聚影响设备的正常运行。
3.2 检查定期检查高性能四轴运动控制卡的连接线和接口,确保连接的稳固性和正常工作。
3.3 锁紧检查高性能四轴运动控制卡的螺丝和连接件是否松动,如果发现松动,及时将其锁紧。
3.4 散热保持高性能四轴运动控制卡的散热系统良好的工作状态,确保设备的正常散热,防止过热损坏。
3.5 环境保护尽量将高性能四轴运动控制卡放置在干燥、清洁、通风良好的环境中,避免潮湿和尘埃对设备造成损害。