1-4轴运动控制系统用户手册【至工机电2012完整解答】
- 格式:pdf
- 大小:4.98 MB
- 文档页数:51

TC55V 运动控制系统1-4轴系列说明书北京多普康自动化技术有限公司安全须知使用本控制系统前,请您仔细阅读本手册后再进行相关的操作。
仔细阅读本操作说明书,以及用户安全须知,采取必要的安全防护措施。
如果用户有其他需求,请与本公司联系。
工作环境及防护:1.控制系统的工作温度为0-40℃,当超出此环境温度时系统可能会出现工作不正常甚至死机等现象。
温度过低时,液晶显示器将出现不正常的情况。
2.相对湿度应控制在0-85%。
3.在高温、高湿、腐蚀性气体的环境下工作时,必须采取特殊的防护措施。
4.防止灰尘、粉尘、金属等杂物进入控制系统。
5.应防护好控制系统的液晶屏幕(易碎品):使其远离尖锐物体;防止空中的物体撞到屏幕上;当屏幕有灰尘需要清洁时,应用柔软的纸巾或棉布轻轻擦除。
系统的操作:系统操作时需按压相应的操作按键,在按压按键时,需要食指或中指的指肚按压,切忌用指甲按压按键,否则将造成按键面膜的损坏,而影响您的使用。
初次进行操作的操作者,应在了解相应功能的正确使用方法后,方可进行相应的操作,对于不熟悉的功能或参数,严禁随意操作或更改系统参数。
由于使用产品不当,而造成危及人身、财产安全的责任,本公司概不负责。
系统的检修:当系统出现不正常的情况,需检修相应的连接或插座连接处时,应先切断系统电源。
再进行必要的检修。
未进行严格操作的技术人员或未得到本公司授权的单位或者个人,不能打开控制系统进行维修操作,否则后果自负。
系统保修说明:保修期:本产品自出厂之日起十二个月内。
保修范围:在保修期内,任何按使用要求操作的情况下所发生的故障。
保修期内:保修范围以外的故障为收费服务。
保修期外:所有的故障均为收费服务。
以下情况不在保修范围内:任何违反使用要求的人为故障或意外故障,尤其电压接反接错。
带电插拔系统连接插座而造成的损坏。
自然灾害等原因导致的损坏。
未经许可,擅自拆卸、改装、修理等行为造成的损坏。
其他事项:本说明书如有与系统功能不符、不详尽处,以系统软件功能为准。
单轴运动控制器操作手册目录一与外部驱动器及IO(输入输出)接线图 (4)二用户管理操作 (5)三系统参数设置 (6)四IO(输入输出)设置 (7)五系统自检操作 (10)六手动操作 (12)七编程操作 (14)八自动执行 (17)九指令详解 (18)十电子齿轮计算及公式 (20)十一编程案例 (23)十二常见问题及处理 (28)一与外部驱动器及IO(输入输出)接线图1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线)2.IO(外部开关及继电器)的接线图(红色线为1号线)注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。
二用户管理操作注意:所有重要参数只有用户登录以后才可修改保存。
防止他人随意更改参数,影响加工质量。
从主画面进入参数设置,并进入用户管理,进行密码输入。
输入用户密码,按确认键,若输入正确,则提示“用户登陆成功”,否则提示“密码错误,请重新输入”。
用户密码出厂值为“123456”。
用户登录成功后,则可进行加工参数的修改保存。
否则加工参数不可修改保存。
若进入此界面后,提示“用户已登录!”,表示用户登录成功。
然后直接按退出按键,对系统参数及IO设置进行编辑,编辑完成,再次进入用户管理,并选择用户退出,按确认键,当前参数设置里的内容全部不可更改。
若需要修改,再次进入用户管理进行登录。
注:用户密码可以修改。
但是必须要记忆下新设的密码,否则加工参数将不可修改保存。
三系统参数设置从主界面的参数设置里进入系统参数,通过移动光标,对光标所在位置进行数据修改。
共分两屏,按“上页”“下页”键切换。
控制参数修改完毕可进入速度参数界面进行速度的参数修改,共2屏,修改方式同上。
修改完成后,按参数保存进入参数保存界面,按确认键对当前修改完成的数据进行保存。
若保存成功则提示“参数保存成功”。
注:加工过程中禁止进行参数保存。
按空格键,可将当前参数值清零。
当设定的速度值小于启动速度时,则速度值为启动速度。
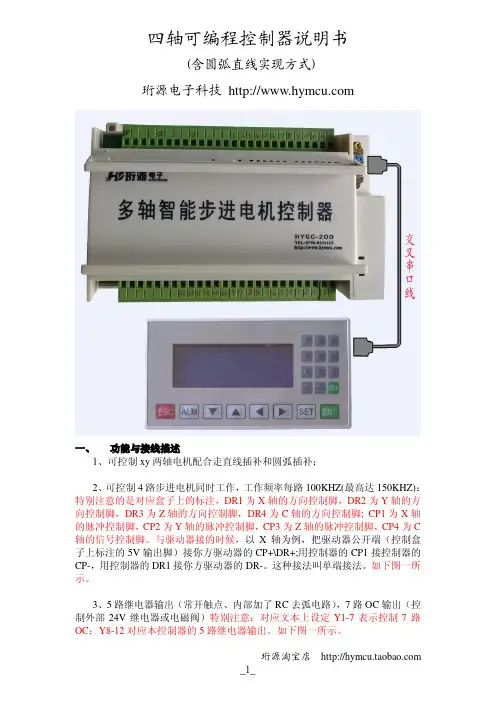
四轴可编程控制器说明书(含圆弧直线实现方式)珩源电子科技 一、 功能与接线描述1、可控制xy两轴电机配合走直线插补和圆弧插补;2、可控制4路步进电机同时工作,工作频率每路100KHZ(最高达150KHZ):特别注意的是对应盒子上的标注,DR1为X轴的方向控制脚,DR2为Y轴的方向控制脚,DR3为Z轴的方向控制脚,DR4为C轴的方向控制脚; CP1为X轴的脉冲控制脚,CP2为Y轴的脉冲控制脚,CP3为Z轴的脉冲控制脚,CP4为C 轴的信号控制脚。
与驱动器接的时候,以X轴为例,把驱动器公开端(控制盒子上标注的5V输出脚)接你方驱动器的CP+\DR+;用控制器的CP1接控制器的CP-,用控制器的DR1接你方驱动器的DR-。
这种接法叫单端接法。
如下图一所示。
3、5路继电器输出(常开触点、内部加了RC去弧电路),7路OC输出(控制外部24V继电器或电磁阀)特别注意:对应文本上设定Y1-7表示控制7路OC;Y8-12对应本控制器的5路继电器输出。
如下图一所示。
4、13路光耦隔离输入(每路外部接到地表示接通):盒子上标为YL1-YL13,分别对应输入X1-X13(在文本上设定):特别说明的是对应外部的输入信号,平时悬空或为24V(控制器工作的输入电源24V),当外部输入信号为电源24V的地的时候表示这个输入口有效。
经常外接开关按钮,或光电反馈开关,接触开关反馈信号等。
如下图一所示。
5、通过串口与外部文本进行通信功能6、可存储10个工程,每个工程可以设置50步二、编程界面和说明1、运行主界面X\Y\Z\C 四轴的运行参数进行实时显示,单位是MM。
参数对应按键,进入相应的设定界面。
测试对应按键,进入相应的测试界面。
启动对应按键,对应启动当前的工程进行运行。
停止对应按键,将停止当前运行的工程,不管当前运行工程到哪一步。
当“启动”时将重新按工程的第一步开始运行。
量产是对应工程的运行次数,假定工程运行一次,加 1.可以按“SET”键进行设定数字,比如清“0”。

四轴控制器使用说明书目录版权申明 .................................................................................................... 错误!未定义书签。
第一章概述 .. (5)1.1 产品简介 (4)1.2应用领域 (4)1.3图片展示 (4)第二章PCB结构及功能 (6)2.1 MCU简述 (5)2.2 PCD4641简述 (6)2.2.1PCD4641概要 (6)2.2.2特长 (6)2.2.3主要功能介绍 (6)2.3 MCU控制芯片方式说明 (8)2.4 调试接口接线线序说明 (10)2.5 BOOT接头说明 (11)2.6启动开关 (11)2.7电气接口 (12)2.7.1驱动器接头 (12)2.7.2运动反馈信号接头 (14)2.7.3励磁时序信号和通用IO口接头 (13)第三章FSMC简介及接线说明 (15)3.1 FSMC简述 (15)3.1.1 FSMC概要 (15)3.1.2 FSMC映射地址空间 (17)3.1.3 技术优势 (16)3.2 MCU访问PCD4641线序说明 (17)第四章MCU使用FSMC访问PCD4641的具体实现 (18)4.1 PCD4641A并行接口方法 (20)4.2 命令 (19)4.2.1 启动方式命令 (19)4.2.2 控制方式命令 (20)4.2.3 寄存器选择命令 (23)4.2.4 输出模式命令 (24)4.2.5状态寄存器 (26)4.3 具体的C语言实现 (24)第五章上位机通信 (28)5.1 上位机与四轴控制器的硬件连接 (28)5.2 上位机与四轴控制器的通信连接 (29)5.3 如何控制四轴控制器 (30)第六章四轴控制器开发环境使用说明 (36)6.1 与PCB板的硬件连接 (36)6.2 驱动的安装 (32)6.3 IAR开发环境的安装 (34)6.4 IDE相关设置 (35)6.5 程序的开发设计 (42)第七章下载程序 (43)7.1 用USB串口线连接四轴控制器 (39)7.2 下载程序 (44)第八章使用安全注意事项 (43)第一章概述1.1 产品简介感谢您选择脉冲电子四轴控制器,为回报客户,我们将以品质一流的四轴控制器、完善的售后服务、高效的技术支持,帮助您建立自己的运动控制系统。

手柄操作手册-4轴操作手册单轴主电控箱副电控箱手柄键盘布局:如下图所示二、按键功能介绍所有参数设置菜单键当报警器报警时,关闭报警按下此键,可以在高速和低速之间切换按下此键,可以在连续,点动,距离这三个手动模式下切换此键功能是回机械的零点,还有数字按键“0”此键功能是Y轴朝正方向行走,还有数字按键“1”此键功能是Z轴朝正方向行走,还有数字按键“2”此键功能是回工件原点,还有数字按键“3”此键功能是X轴朝负方向行走,还有数字按键“4”此键功能是定义XY工件原点,还有数字按键“5”此键功能是X轴朝正方向行走,还有数字按键“6”此键功能是U轴朝负方向行走,还有数字按键“7”此键功能是Z轴朝负方向行走,还有数字按键“8”此键功能是Y轴朝负方向行走,还有数字按键“9”无“.”无此键功能是需要确定或选择时的功能键此键功能是加工是暂停功能键或在菜单模式下的返回上一级菜单功能键此键功能是在修改是需要删除以前的设置的功能键此键功能是在加工时中断加工的功能键或在修改参数时,不需要修改的功能键三、系统设置按进入参数设置界面。
按或可以上下选择所需要的选项,按进入下一级菜单。
进入机床参数设置按或可以上下选择所需要的选项,按进入下一级菜单。
按或可以上下选择所需要的选项,按此项按照您实际导程设置。
例如X轴丝杠导5的,X轴输入5。
进入修改。
进入驱动器脉冲数按或可以上下选择所需要的选项,按例如:X轴驱动器的细分数为16细分,则此项设置为:3200 进入机床尺寸进入修改。
按或可以上下选择所需要的选项,按进入修改。
例如:机床为1325机型,那么X输入:1300Y输入:2500,Z按照Z 最大行程设置进入回零设置按改。
回零速度或可以上下选择所需要的选项,按可以进行修按或可以上下选择所需要的选项,按进入修改。
请设置合适回零设置。
按或可以上下选择所需要的选项,按进入修改。
进入电机设置按行修改。
或可以上下选择所需要的选项,按可以进例如:实际操作中,如果按切换一下。
四轴表带自动钻孔机一简介四轴表带自动钻孔机控制系统是由海川数控自主研发的控制系统。
硬件组成包括海川自主研发的HC200A4控制器,人机界面以及接近开关传感器组成。
具有自动化程度高,加工速度快,工作稳定等特点。
目前已经多家厂商的机器中正(4)支持自适应回原点功能及自定义原点功能(5)支持伺服报警显示功能(6)支持运行速度及回原点速度设定(7)支持手动气缸动作方便调机(8)支持手动伺服点动及回原点?方便调机二人机界面使用说明2.1系统初始化:2.2自动操作)按钮,系统切换到钻孔参数页面如图按钮,系统切换到孔位参数页面如图(2-4)所示。
公用参数按一下【公用参数】按钮,系统切换到公用参数页面如图(2-6)所示。
系统参数按一下【系统参数】按钮,系统切换到系统参数页面如图(2-7)所示。
手动操作按一下【手动操作】按钮,系统切换到手动操作页面如图(2-1)所示。
钻孔1显示当次循环中钻头1工作时的电流最大值。
钻孔2显示当次循环中钻头2工作时的电流最大值。
钻孔3显示当次循环中钻头3工作时的电流最大值。
切刀显示当次循环中切刀工作时的电流最大值。
报警原因显示机器当前的状态及报警信息。
计数显示机器加工的数量。
计时显示机器运行一周的时间。
装钻头1按一下再按一下【装钻头1】装钻头2按一下再按一下【装钻头2】按钮,机器送料一次。
按钮,系统切换到调机模式页面如图(2-2)所示。
自动/手动【自动/手动】按钮按下时,机器只加工一次。
暂停【暂停】按钮按下时,机器立即暂停。
松开继续加工。
启动当显示等待启动信息是,按一下【启动】按钮,机器进入加工状态。
停止按一下【停止】按钮,机器立即停止当前状态,再执行复位动作。
运行按一下【运行】按钮,机器进入准备状态,准备完成后才可开机。
定位按一下【定位】按钮,定位气缸前进。
再按一下【定位】按钮,定位气缸后退。
压料按一下【压料】按钮,压料气缸压紧。
再按一下【压料】按钮,压料气缸松开。
压送按一下【压送】按钮,压送气缸压紧。
四轴脱机运动控制器说明手册外观图:开机画面要求极为严格,固对一般低端卡(山寨卡)会有所排斥,请更换其它正品卡再读取!对于HDSD(TF),会因卡的问题,并不能完全认识,请更换其它的卡再读取!在存入TF卡中的文件与文件夹的总数量大于50个后不给予显示!“返回原点”Z轴升到安全高度,XY轴退“返回机械原点”:Z轴退到机械原点,Y轴退到机械原点,Y轴退到机械原点,(请注意配置脚,电平与使能)“对刀”Z轴下降(或升高),当碰到探针,停止运行后清Z轴坐标为对刀器偏移值,并Z轴抬刀得弹回高,此过程结束.(请注意配置脚,电平与使能)面板快徢键¢为“坐标清除操作”X轴单轴清零Y轴单轴清零Z轴单轴清零A轴单轴清零全轴清零退出功跟字意所示一样面板快徢键¤“手动点动”“手动”恢复手动“1mm”:当选取时后按对应的方向键,会移动相应的长度(增量移动方式)如想移动一个具体的长度,可以在输入筐输入具体的数字,(只能按”OK”后变成黄筐才能输入,返回变绿有效),按相应的轴方向键,即可.对应X+X-Y+Y-Z+Z-A+A-都有效面板快徢键X Y Z A 为“直接坐标操作”“运行到到”对应的轴会直接运行所指定的坐标中.“更变坐标”:对应的轴会直接变成所设定的数(此操作为不可逆,请慎重操作)面板快徢键S为“主轴操作”输入筐可填入转数,此参数的最高值在主机设定中可设置。
面板快徢键F为“手动给进速度操作”示筐中的D的值是手动给进速度。
面板快徢键G为“工件坐标系操作”选定G*,可以选取坐件坐标系,需要配合机械坐标来操作。
点击”机台配置”如下,后点击”电机参数”进入如下画面字意解释:脉冲当量:单位长度所需的脉冲个数,(每一毫米所需的脉冲量)支持浮点输入最高速度:此电机所能运行的最高速度(毫米/分钟),当输入超过系统所能达到的最大值时,会按系统所能达到的最大值为准.加速度: 电机所能运行的最高加速度.此值过小会严重影响多微线段的拐角速度脉冲电平: 1或0,高电平有效,还是低电平有效,由驱动器决定的方向电平:1或0高电平有效,还是低电平有效,改变此会改变运行方向脉冲宽度:脉冲有效的输出时间,只为一个量值,正常下可以取0.脉冲当量= 步进电机驱动细分数×(360/步进电机步进角度)/丝杆螺距例: 步进角度=1.8 丝杆螺距= 5mm 细分= 8脉冲当量= 8*(360/1.8)/5 = 320最高速度值: 要按照电机的能力最终确定,以不失步为原则,取最大速度值的70%,留30%余量给电机(步进电机的特性).T加速度表如下:加速度值的最终确定按电机的最大所能容忍的加速度值的70%为宜,保留30%突变值给电机,才能保证电机不会失步(步进电机的特性).脉冲电平与脉冲宽度的关系(注:实际宽度是给定宽度加系统默认度)方向电平:当方向电平为1是在轴正运行时,输出为高电平,反运行为低电平当方向电平为0是在轴正运行时,输出为低电平,反运行为高电平”打开文件”在显示栏中出现文件名,此文件名格式为标准的8_3格式8个字符名,3个后缀当显示中文时能有四个中文名,3个后缀,大于四个将不给全名显示,用~N代替旋动高级功能键,或上下功能键能翻页显示点击高级功能键的中间键或”OK”键可以选取文件,进入如下界面此时可以打开文件,或返回文件选择(重新选取),或退出到主界面点击”打开此文件”进入该文件内容显示如下现在可以浏览文件内容了,点击高级功能键中间键,或OK键可以调出始下子菜单的界面:可以选取是否从第一行开始,或N行开始,或指向N行进行显示,也可以直接返回文件选择重新选取文件扣选筐选定输入筐后,可以输入所需要的行数,输入后选”指向选取行”就可以直接跳跃到指定的行数,如对于超大,超多行,所用耗时间也会跟着变大!!如果输入的行数大于文件本身的行数,此时会指向文件的最尾端.点击:“从第一行始始”,”从选取行开始”这两项都会跳出到主界面来, 到此打开文件完毕.并把主键功有交给主界面区.”开始运行”就可以直接开始运行了!,如果在此之前有断点过,并且没更改过文件,此时会跳出一个窗口如下:第一项为安全高度,安全高度的作用:在当前头具的位置要移动到加工位置时会提起刀具,此高度就是安全高度,也可以看做Z轴的所在高度用扣选筐选定后可以更改这个值,也可以在高级功能里更改默认安全高度.“续点运行”:断点在N点至N+1之间点时,续点运行后会直接从N点开始,其中会重复N至N+1点之间已加工过的轨迹,并接入未完成的轨迹.“续点前运行” :断点在N点至N+1之间点时,续点前运行后会直接从N+1开始,会丢弃N至N+1行的加工轨迹,请多加注意.“退出”放弃本次运行.(注: 当断点续接运行行数超大时,因为要从头找出坐标系与续点,会有一定运算时间,TF卡的读写速度会影响当前的运算速度.在左上角会指示运行数)“限位输入”使能:是否选定限位功能脚位: 对于选定限位功能后,所对应的输入脚位(可选取1-16)电平: 输入高电平有效,还是低电平有效. (见模拟图)“机械原点”使能:是否选定限位功能脚位: 对于选定限位功能后,所对应的输入脚位(可选取1-16)电平: 输入高电平有效,还是低电平的效, (见模拟图)方向:返回至机械时XYZ方向,可正可负返回速度:返回至机械时与对刀时的速度以上的输入脚位对应着控制器的16个输入端,可以任意指定是那个脚位做为当前限位输入“文件管理”点击”文件管理”所进入左边图示的文件列表界面,可以添加新文件,删除文件,修改文件.点击所扣选筐指定的文件后会进入如下界面:“编缉此文件”:可以编辑所选定的文件“返回文件选择”: 重新选取文件“新建文件” :新建一个文件“删除文件”:删除选定的文件“返回主界面”:直接退回到主界面新建文件与删除文件界面:“编缉此文件”“编缉此行”对选定的行进行编缉控制器面板上的相应键,输入所需的G代码,后按”OK”键,保存返回,(前端是旧的参数行),面板修键中有”←”可以对输入出错的字符进行退位修改. “插入行” ,”删除此行”在所选取行的前端插入空行如图:“删除此行”,会删除指定行“返回行选择”返回G指令行再重新选定“返回文件选择”返回文件列表界面注: 如果文件最后一条指令没能运行到,请在文件最后加入一行空行!“主轴控制”M03,M04,M05M03顺时针运行: 此时关闭M04对应的脚位并开启M03对应的脚位M04逆时针运行: 此时关闭M03对应的脚位并开启M04对应的脚位M05 会同时关闭M03,M04的脚M07,M08,M09M07: 开启对应的脚位,不会影响M08M08: 开启对应的脚位,不会影响M07M09: 会同时关闭M07,M08的脚位延时: 启开M03,M04,M07,M08所用时间. PWM的位脚是固定为16脚,如开启这个脚位,对应于OUT输出应改去除,不然会因两者同时控制而冲突!PWM频率: 是指输出的频率Max S: 是指最大S对应于最大频率占空比= S(G指令给定的值)/(MAX S)如有需要控制复位时机台使能的请配置如下:当出现RESET灯闪动时,相应配置的脚位会输出相应的电平可用这个来控制四轴的使能端,或机台工作提示安全高度输入筐:输入后,保存在系统中G指令码参数:G2/G3超差是指手工计算或其它计算后输入G02/G03.是因为计算精度问题,使之圆弧圆心跟给定的值不一致,此刻,有一个容错值,系统会根据给定的参数,重新计算最理想的圆心坐标,详述可见G02/G03说明弦长: 系统拟合生成段弧形时的弧形弦长,详述请见G指令码说明高级操作功能:在待机时(没有运行加工)进行调速: 按住停止键不放(黑四方键),同时再旋动高级功能键,就可以直接调节运行速度百份比,在主屏幕上可以看到速度百份比(I:100-1)显示.在加工运行中,直接旋动高级功能键,可以调整运行速度的百份比, 在主屏幕上可以看到速度百份比(I:100-1)显示.超速133.33%运行操作:(1)运行加工中:下压高级功能键的中间键,旋动高级功能键,就可以超出系统给的最高速度33.33%,(2)在待机下:按住停止键不放(黑四方键), 下压高级功能键的中间键,旋动高级功能键,就可以了.(此操作应注意系统给定的参数最低限定,加速度与最高速度参数变量会因此而做新的调整,会使机台的整体性能超出预设值,所以要慎重使用!)接口模拟图所需电源为稳定直压12V,电流应大于1A,本控制器工作电流在于300MA-800MA左右在接入电源时,务必分清正负端!模拟图所示的”5V输出”是指输出的电源,此电流可提供500MA左右的电流给外部器件使!G指令解读G00:格式:G0X..Y..Z…A轴快速移动,G0用于快速定位刀具,没有对工件进行加工。
维宏维鸿四轴真四轴联动雕刻机运动控制卡说明书1.1 维鸿系统的安装在安装新的维鸿前~请删除旧版本的维鸿。
删除的方法请参考程序卸载一节。
维鸿系统包括软件和运动控制卡两部分。
所以~系统的安装也分为两个阶段: 软件安装和运动控制卡的安装。
总体上~请您在安装完软件之后再安装运动控制卡~这样运动控制卡的驱动程序就不需要单独安装。
所以简单以说~可以分为这样几个步骤: (1) 安装维鸿软件~待安装程序提示关闭计算机后~关闭计算机。
(2) 关闭计算机后~安装运动控制卡。
(3) 重新启动计算机~进入Windows操作系统后~略微等待一会~待Windows自动完成配置~整个安装工作就算完成了。
(4) 运行维鸿系统。
下面详细介绍其中的关键步骤。
维鸿软件安装请按照下面的步骤安装软件:(1) 打开计算机电源~启动计算机~系统自动运行进入Windows操作系统。
如果你还没有安装Windows操作系统~请首先安装该操作系统。
(2) Windows 操作系统启动后~注意请关闭其他正在运行的程序。
(3) 解压维鸿V2.0免安装包,打开里面的dotNetFrameWork文件夹~安装dotNetFx40_Full_x86_x64.exe (4) 打开维鸿V2.0文件夹~右键创建桌面快捷方式(5) 双击打开桌面快捷键方式~运行维鸿。
维鸿软件驱动安装USB设备驱动支持XP、win7或win8等32位操作系统~任何一个小的错误都有可能安装驱动失败。
1. 将USB数据线连接到电脑任意USB接口~若出现新硬件向导信息提示中选“是~仅这一次,I,”选项~点击“下一步”。
在出现新硬件向导信息提示中选“从列表或指定位置安装,高级,”选项~点击“下一步”。
2. 选择“在搜索中包括这个位置,O,”选项~点击“浏览”。
3. 选择“维鸿控制设备驱动”文件夹,点击“下一步”。
4.在找到新的硬件向导对话框中选中对应的驱动,点击“下一步”(第一次安装时会自动跳过)。
Levante Sistemas deAutomatización y Control S.L.CatálogosDistribuidor oficial Bosch Rexroth, Indramat, Bosch y Aventics. LSA Control S.L. - Bosch Rexroth Sales Partner Ronda Narciso Monturiol y Estarriol, 7-9Edificio TecnoParQ Planta 1ª Derecha, Oficina 14(Parque Tecnológico de Paterna)46980 Paterna (Valencia)Telf. (+34) 960 62 43 01*************************www.boschrexroth.esServodyn-T / Servodyn-DEMC Manual Servodyn-T, -D101VersionAutomationstechnikServodyn-T / Servodyn-DEMC Manual Servodyn-T, -D1070 066 074-101 (96.07) GBReg. Nr. 16149-03E1996by Robert Bosch GmbH,All rights reserved, including applications for protective rights.Reproduction or handing over to third parties are subject to our written permission.Discretionary charge10.–DMEMC Manual ServodynĆT, ĆDContentsEMC Manual ServodynĆT, ĆDContentsEMC Manual ServodynĆT, ĆDSafety instructionsEMC Manual ServodynĆT, ĆDSafety instructionsEMC Manual ServodynĆT, ĆDSafety instructionsEMC Manual ServodynĆT, ĆDSafety instructionsEMC Manual ServodynĆT, ĆDIntroductionEMC Manual ServodynĆT, ĆDIntroductionEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDSwitch cabinet structureEMC Manual ServodynĆT, ĆDMotorĆ, sensor linesEMC Manual ServodynĆT, ĆDMotorĆ, sensor linesEMC Manual ServodynĆT, ĆDMotorĆ, sensor linesEMC Manual ServodynĆT, ĆDMotorĆ, sensor linesEMC Manual ServodynĆT, ĆDTypical configurationEMC Manual ServodynĆT, ĆDTypical configurationEMC Manual ServodynĆT, ĆDTypical configurationEMC Manual ServodynĆT, ĆDTypical configurationEMC Manual ServodynĆT, ĆDAmbient conditionsEMC Manual ServodynĆT, ĆDAmbient conditionsEMC Manual ServodynĆT, ĆDLegal basis of EMCEMC Manual ServodynĆT, ĆDLegal basis of EMCEMC Manual ServodynĆT, ĆDLegal basis of EMCEMC Manual ServodynĆT, ĆDLegal basis of EMCEMC Manual ServodynĆT, ĆDLegal basis of EMCEMC Manual ServodynĆT, ĆDLegal basis of EMCEMC Manual ServodynĆT, ĆDLegal basis of EMCEMC Manual ServodynĆT, ĆDLegal basis of EMCEMC Manual ServodynĆT, ĆDLegal basis of EMCEMC Manual ServodynĆT, ĆDLegal basis of EMCEMC Manual ServodynĆT, ĆDInstallation of machinesEMC Manual ServodynĆT, ĆDInstallation of machinesEMC Manual ServodynĆT, ĆDInstallation of machines。