信号与系统第二章_线性时不变系统
- 格式:ppt
- 大小:3.59 MB
- 文档页数:10
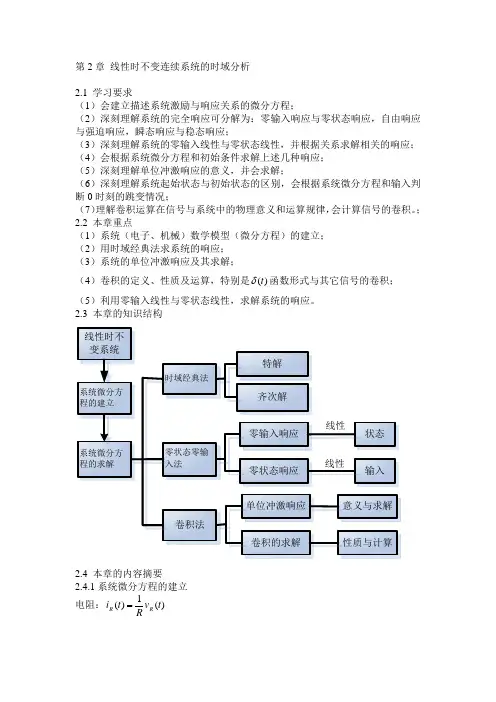
第2章 线性时不变连续系统的时域分析2.1 学习要求(1)会建立描述系统激励与响应关系的微分方程;(2)深刻理解系统的完全响应可分解为:零输入响应与零状态响应,自由响应与强迫响应,瞬态响应与稳态响应;(3)深刻理解系统的零输入线性与零状态线性,并根据关系求解相关的响应; (4)会根据系统微分方程和初始条件求解上述几种响应; (5)深刻理解单位冲激响应的意义,并会求解;(6)深刻理解系统起始状态与初始状态的区别,会根据系统微分方程和输入判断0时刻的跳变情况; (7)理解卷积运算在信号与系统中的物理意义和运算规律,会计算信号的卷积。
; 2.2 本章重点(1)系统(电子、机械)数学模型(微分方程)的建立; (2)用时域经典法求系统的响应; (3)系统的单位冲激响应及其求解;(4)卷积的定义、性质及运算,特别是()t δ函数形式与其它信号的卷积; (5)利用零输入线性与零状态线性,求解系统的响应。
2.3 本章的知识结构2.4 本章的内容摘要2.4.1系统微分方程的建立电阻:)(1)(t v Rt i R R =电感:dtt di L t v L L )()(= )(d )(1)(0t i v Lt i L tL L +=⎰∞-ττ 电容:dtt dv C t i C C )()(= ⎰+=tt L C C t i i Ct v 0)(d )(1)(0ττ 2.4.2 系统微分方程的求解 齐次解和特解。
齐次解为满足齐次方程t n t t h e c e c e c t y 32121)(λλλ+⋅⋅⋅++=当特征根有重根时,如1λ有k 重根,则响应于1λ的重根部分将有k 项,形如t k t k t k t k h e c te c e t c e t c t y 111112211)(λλλλ++⋅⋅⋅++=--- 当特征根有一对单复根,即bi a +=2,1λ,则微分方程的齐次解bt e c bt e c t y at at h sin cos )(21+= 当特征根有一对m 重复根,即共有m 重ib a ±=2,1λ的复根,则微分方程的齐次解bt e t c bt te c bt c t y at m m at h cos cos cos )(121-+⋅⋅⋅++= bt e t d bt te d bt e d at m m at at sin sin sin 121-+⋅⋅⋅+++ 特解的函数形式与激励函数的形式有关。

第2章线性时不变系统2.1 设x[n]=δ[n]+2δ[n-1]-δ[n-3]和h[n]=2δ[n+1]+2δ[n-1],计算下列各卷积:;;。
解:(a)(b)(c)2.2 考虑信号将A和B用n来表示,以使下式成立:解:故A=n-9,B=n+3。
2.3 已知输入x[n]和单位脉冲响应h[n]为,求输出y[n]=x[n]*h[n],并画出y[n]。
解:设,h1[n]=u[n],则x[n]=x1[n-2],h[n]=h1[n+2]即y[n]的波形如图2-1所示。
图2-1 2.4 计算y[n]=x[n]*h[n],这里解:当,即12≤n≤18时,当,即7≤n<12时,当即18<n≤23时,当n为其他值时,y[n]=0,故2.5 设和,式中,N≤9是一个整数。
已知y[n]=x[n]*h[n]和y[4]=5,y[14]=0,试求N为多少。
解:当n<0及n>9+N时,y[n]=0。
由于y[14]=0,故9+N <14,即N<5。
而当即N≤n≤9时,有又y[4]=5,由此可得N=4。
2.6 计算卷积y[n]=x[n]*h[n],其中解:当n≥0时,当n<0时,故2.7 一个线性系统S有如下输入-输出关系:y[n]=,式中g[n]=u[n]-u[n-4]。
(a)当x[n]=δ[n-1]时,求y[n];(b)当x[n]=δ[n-2]时,求y[n];(c)S是线性时不变的吗?(d)当x[n]=u[n]时,求y[n]。
解:(a)(b)(c)S是线性的但非时不变的,因为当x[n]向右平移了1个单位时,y[n]向右平移了2个单位,故S不是线性时不变的。
(d)2.8 确定并并粗略画出下列两个信号的卷积:解:则y(t)的波形如图2-2所示。
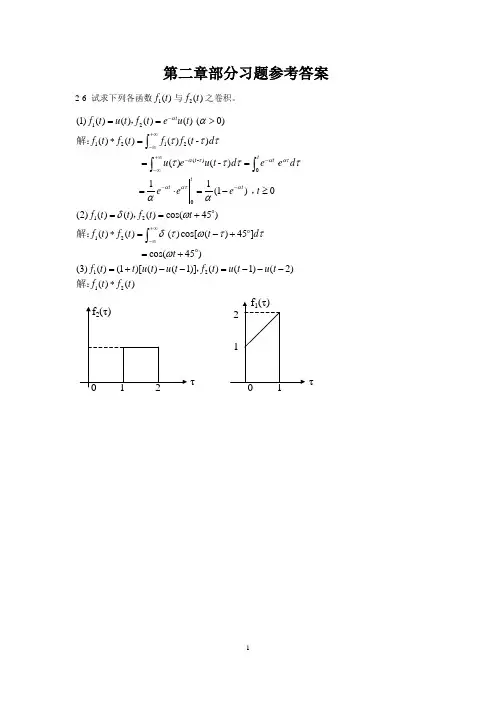
第二章部分习题参考答案2-6 试求下列各函数1()f t 与2()f t 之卷积。
121212(-)01(1) ()() ()() (0) ()()()(-) ()(-)11(1) 0(2) ()t tt t tt t f t u t f t e u t f t f t f f t d u eu t d e e d e e e t f t ααταατααταατττττττααδ-+∞-∞+∞---∞--==>*===⋅=⋅=-≥=⎰⎰⎰,解:,2121212() ()cos(45)()()()cos[()45] cos(45)(3) ()(1)[()(1)] ()(1)(2) ()()t f t t f t f t t d t f t t u t u t f t u t u t f t f t ωδτωττω+∞-∞=+*=-+=+=+--=---*⎰,解:,解:ττ222221211211()(-1)(-1)-2(-2)(-2)(-1)(-1)-(-2)(-2)2211-(-2)(-2)(-3)(-3)-(-2)(-2)(-3)(-3)22()*()()1,()0123, (1-)(1)21(1)--(12ttf t t u t t u t t u t t u t t u t t u t t u t t u t f t f t f t t f t t t dt t ft t t t τττ=+++=<=<<+=+-=++⎰222-112222212111)-222123, (1-)(1)-221()2(1)-2(1-)(-1)211121---152223, ()*()0.t t t t t t d t f t t t t t t t t t t t f t f t ττττ-+=<<+=+=+++=+++=++>=⎰121221--(4) cos , (1)-(-1)()*()()(-) [(1)-(-1)][cos(-)] cos[(1)]-cos[(-1)]f t t f t t t f t f t f f t d t t t d t t ωδδτττδδωττωω+∞∞+∞∞==+==+⋅=+⎰⎰ -212-212--2-220(5) ()(), ()sin ()()()*()()sin(-)(-) sin(-)sin t t ttt tf t e u t f t t u t f t f t f t e u t u t d e t d ee d τττττττττ+∞∞==⋅==⋅⋅⋅=⋅=⋅⎰⎰⎰-12-(-)--0022-(-)-33-2-3(6) ()2[()-(-3)], ()4()-(-2)0, ()0.02,()2488-825, 88()8(-)5, ()0.t tt t t tt t t t t f t e u t u t f t u t u t t f t t f t e d e e e t ft ed ef t e e e t f t ττττττ-==<=<<==⋅=<<===>=⎰⎰2-8 求阶跃响应为32()(21)()t t s t e e u t --=-+的LTI (线性时不变)系统对输入()()t x t e u t =的响应。
信号与系统实验报告连续线性时不变系统的分析专业:电子信息工程(实验班)姓名:曾雄学号:14122222203班级:电实12-1BF目录一、实验原理与目的 (3)二、实验过程及结果测试 (3)三、思考题 (10)四、实验总结 (10)五、参考文献 (11)一、实验原理与目的深刻理解连续时间系统的系统函数在分析连续系统的时域特性、频域特性及稳定性中的重要作用及意义。
掌握利用MATLAB 分析连续系统的时域响应、频响特性和零极点的基本方法。
二、实验过程及结果测试1.描述某线性时不变系统的微分方程为: ''()3'()2()'()y t y t y t f t f t++=+ 且f(t)=t 2,y(0-)=1,y ’(0-)=1;试求系统的单位冲激响应、单位阶跃响应、全响应、零状态响应、零输入响应、自由响应和强迫响应。
编写相应MATLAB 程序,画出各波形图。
(1)单位冲激响应: 程序如下:%求单位冲激响应a=[1,3,2]; b=[1,2]; sys=tf(b,a); t=0:0.01:10; h=impulse(sys,t);%用画图函数plot( )画单位冲激响应的波形plot(h); %单位冲激响应曲线 xlabel('t'); ylabel('h');title('单位冲激响应h(t)') 程序运行所得波形如图一:200400600800100012000.10.20.30.40.50.60.70.80.91th单位冲激响应h(t )图一 单位冲激响应的波形(2)单位阶跃响应: 程序如下:%求单位阶跃响应a=[1,3,2]; b=[1,2]; sys=tf(b,a); t=0:0.01:10; G=step(sys,t);%用画图函数plot( )画单位阶跃响应的波形plot(G); %单位阶跃响应曲线 xlabel('t'); ylabel('g');title('单位阶跃响应g(t)') 程序运行所得波形如图二:2004006008001000120000.10.20.30.40.50.60.70.80.91tg单位阶跃响应g(t )图二 单位阶跃响应的波形 (3)零状态响应: 程序如下:%求零状态响应yzs=dsolve('D2y+3*Dy+2*y=2*t+2*t^2','y(0)=0,Dy(0)=0') %用符号画图函数ezplot( )画各种响应的波形 t=0:0.01:3;ezplot(yzs,t); %零状态响应曲线 axis([0,3,-1 5]);title('零状态响应曲线yzs'); ylabel('yzs');程序运行所得波形如图三:00.511.522.53-112345t零状态响应曲线yzsy z s图三 零状态响应的波形(4)零输入响应: 程序如下:%求零输入响应yzi=dsolve('D2y+3*Dy+2*y=0','y(0)=1,Dy(0)=1') %用符号画图函数ezplot( )画零输入响应的波形 t=0:0.01:3;ezplot(yzi,t);%零输入响应曲线 axis([0,3,-1,2]); title('零输入响应yzi'); ylabel('yzi');程序运行所得波形如图四:图四 零输入响应的波形(5)全响应:程序如下:%求全响应y=dsolve('D2y+3*Dy+2*y=2*t+2*t^2','y(0)=1,Dy(0)=1') %用符号画图函数ezplot( )画全响应响应的波形00.511.522.53-1-0.50.511.52t零输入响应yziy z it=0:0.01:3;ezplot(y,t); %全响应曲线 axis([0,3,-1,5]); title('全响应y'); ylabel('y');程序运行所得波形如图五:00.511.522.53-112345t全响应yy图五 全响应的波形(6)自由响应:程序如下:%自由响应y=dsolve('D2y+3*Dy+2*y=2*t+2*t^2','y(0)=1,Dy(0)=1'); %全响应 yht=dsolve('D2y+3*Dy+2*y=0','y(0)=1,Dy(0)=1'); % 求齐次通解yt=dsolve('D2y+3*Dy+2*y=2*t+2*t^2','y(0)=0,Dy(0)=0'); % 求非齐次通解 yp=yt-yht;yh=y-yp; % 求齐次解,即自由响应 t=0:0.01:3; ezplot(yh,t); title('自由响应yh'); ylabel('yh');程序运行所得波形如图六:0.511.522.530.511.52t自由响应yhy h图六 自由响应的波形(7)强迫响应: 程序如下:%强迫响应yht=dsolve('D2y+3*Dy+2*y=0','y(0)=1,Dy(0)=1'); % 求齐次通解yt=dsolve('D2y+3*Dy+2*y=2*t+2*t^2','y(0)=0,Dy(0)=0'); % 求非齐次通解 yp=yt-yht; % 求特解,即强迫响应 t=0:0.01:3; ezplot(yp,t); title('强迫响应yp'); ylabel('yp');程序运行所得波形如图七:0.511.522.53-112345t强迫响应ypy p图七 强迫响应的波形2.给定一个连续线性时不变系统,描述其输入输出之间关系的微分方程为:编写MATLAB 程序,绘制系统的幅频响应、相频响应、频率响应的实部和频率响应的虚部的波形,确定滤波器的类型。
线性时不变系统(LTI system)是一类非常重要的信号处理系统,它在很多领域都有着广泛的应用。
本文将对线性时不变系统的定义、特性以及其在信号处理、控制系统、通信系统等方面的应用进行详细的介绍。
首先,我们来解释一下什么是线性时不变系统。
线性系统是指输出信号是输入信号的线性函数,即对于任意的输入信号x1和x2,以及任意的常数a1和a2,都有输出信号y1=ax1+by1和y2=ax2+by2。
时不变系统是指系统的输出信号只与输入信号的形态有关,而与时间无关。
因此,线性时不变系统就是既是线性系统又是时不变系统。
线性时不变系统有着许多优秀的特性,使得它在信号处理、控制系统、通信系统等领域都有着广泛的应用。
其中,最重要的优秀特性就是线性性和时不变性。
因为线性性使得系统的输出信号可以通过线性变换得到,而时不变性使得系统的输出信号与时间无关,这为信号的分析和处理带来了巨大的便利。
在信号处理领域,线性时不变系统可以用来模拟各种不同的信号处理器。
例如,低通滤波器就是一种常见的线性时不变系统,它可以用来消除高频噪声,使得信号更加平稳。
此外,线性时不变系统还可以用来提取信号的特征,例如通过频谱分析来获取信号的频率成分。
在控制系统领域,线性时不变系统也有着重要的应用。
例如,在飞行控制系统中,可以使用线性时不变系统来模拟飞机的运动方程,并通过调节系统的参数来实现飞机的姿态控制。
此外,在工业生产过程中,也可以使用线性时不变系统来控制生产设备的运行状态,从而实现生产过程的自动化。
在通信系统领域,线性时不变系统也有着广泛的应用。
例如,在数字通信系统中,可以使用线性时不变系统来模拟信道的传输特性,并通过调节系统的参数来实现信号的增益控制。
此外,在无线电通信系统中,也可以使用线性时不变系统来模拟电磁波的传播特性,并通过调节系统的参数来实现信号的功率控制。
总之,线性时不变系统是一类非常重要的信号处理系统,它在信号处理、控制系统、通信系统等领域都有着广泛的应用。