哈工大结构动力学大作业2012春
- 格式:docx
- 大小:192.15 KB
- 文档页数:18
结构动力学大作业对于如下结构,是研究质量块的质量变化和在简支梁上位置的变化对整个系统模态的影响。
1以上为一个简支梁结构。
集中质量块放于梁上,质量块距简支梁的左端点距离为L.将该简支梁简化为欧拉伯努利梁,并离散为N 个单元。
每个单元有两个节点,四个自由度。
单元的节点位移可表示为:]1122,,,e v v δθθ⎡=⎣则单元内一点的挠度可计作:带入边界条件:1332210)(x a x a x a a x v +++=01)0(a v x v ===3322102)(L a L a L a a v L x v +++===110d d a xv x ===θ2321232d d L a L a a xv Lx ++===θ10v a =[]1234N N N N N =建立了单元位移模式后,其动能势能均可用节点位移表示。
单元的动能为:00111()222l l T TT ke e e e e y E dx q N Ndxq q mq t ρρ∂===∂⎰⎰ 其中m 为单元质量阵,并有:lT m N Ndx ρ=⎰带入公式后积分可得:2222156225413224133541315622420133224l l l l l l l m l l ll ll ρ-⎡⎤⎢⎥-⎢⎥=⎢⎥-⎢⎥---⎣⎦单元势能可表示为2220011()()222T l lT Te pe e e e q y E EI dx EI N N dxq q Kq x ∂''''===∂⎰⎰其中K 为单元刚度矩阵,并有()lT K EI N N dx ''''=⎰2232212612664621261266264l l l l l l EI k l l l l lll -⎡⎤⎢⎥-⎢⎥=⎢⎥---⎢⎥-⎣⎦以上为单元类型矩阵,通过定义全局位移矩阵,可以得到系统刚度矩阵和系统质量矩11θ=a )2(1)(3211222θθ+--=Lv v L a )(1)(22122133θθ++-=Lv v L a 1232133222231)(θ⎪⎪⎭⎫ ⎝⎛+-+⎪⎪⎭⎫ ⎝⎛+-=L x L x x v L x L x x v 22232332223θ⎪⎪⎭⎫ ⎝⎛-+⎪⎪⎭⎫ ⎝⎛-+L x L x v L x L x 24231211)()()()()(θθx N v x N x N v x N x v +++=阵。
机械动力学大作业含弹性摆杆的铰链四杆机构动力学仿真学号:院系名称:机电工程学院专业:机械工程学生姓名:本次进行设计和分析的对象为平面铰链四杆机构,在Adams的环境下,通过对四杆机构进行建模以及运动仿真,绘制出摆杆的相关曲线图。
为了形成有效的对比,先建立含有刚性摆杆的四杆机构,进行运动仿真,绘制出摆杆的相关曲线。
再建立含有柔性摆杆的铰链四杆机构,所有参数设置均和刚性摆杆一样。
考虑到弹性摇杆可能发生较大的形变,不利于观测,绘制摇杆运动曲线时选择摇杆的质心作为参考点。
在Adams中主要有三种方法创建柔性构件,第一种是将刚性构件离散化后采用柔性梁连接;第二种是直接将刚体替换为柔性体;第三种是运用有限元分析的方法建立柔性构件。
本次建模,主要采用前两种方法建立柔性摆杆。
运用有限元建立柔性构件,等以后再进行深入研究。
同时两种方法建立的柔性杆可以形成对比。
通过本次设计,主要学习了Adams 软件建模以及运动仿真、图形处理、刚柔混合建模的操作方法,对自己也是一个很大锻炼和提升。
设计的为平面曲柄摇杆机构。
相关参数如:曲柄长L=200mm,宽W=60mm,高D=30mm;连杆长L=427mm,宽W=30mm,高D=20mm;摇杆长L=403mm,宽W=40mm,高D=20mm;机架长L=600mm,宽W=40mm,高D=20mm;曲柄角速度为40deg/sec。
经过验证,最短杆长度加上最长杆长度小于中间两根杆的长度之和,满足曲柄存在的条件,且最长杆为机架,故为曲柄摇杆机构。
一、建模过程1、建立四个标记点,这四个点依次连接就可以确定一个铰链四杆机构。
2、建立四根杆的模型3、在杆件之间添加转动副4、选择最长杆为机架并固定5、给曲柄添加驱动,使曲柄角速度为40deg/sec。
6、使模型的显示方式为实体显示7、进行运动仿真,主要通过时间和步长来控制仿真运动的快慢。
8、载入动画,进行图像处理,绘制曲线图。
9、将刚性摇杆换成柔性的摇杆并添加转动副和驱动10、进行运动仿真11、载入动画,进行图像处理,绘制曲线。
一、填空题:(每空1分,共22分)1、《建筑钢结构焊接技术规程》(JGJ-2002)推荐使用碳当量(或C E) 来衡量低合金钢的焊接性能。
2、硫、磷、氮、氧和氢均为有害元素,其中磷和氮易引起钢材的低温冷脆。
3、影响结构疲劳寿命的最主要因素是构造状态、循环荷载和循环次数。
4、钢材的机械性能指标为屈服强度、抗拉强度、伸长率、冷弯性能、Z向收缩率和冲击韧性。
5、主要焊接结构不能采用Q235 A 级钢,因含碳量不作交货条件,无法保证含碳量。
6、将一块Q235B级钢板与Q345B级钢板通过焊接进行连接时,宜选择E43型焊条。
7、«钢结构设计规范»(GB50017-2003)规定:质量属于三级的焊缝,焊缝的抗拉设计强度等于母材抗拉设计强度的0.85 倍。
8、单轴对称的T形截面轴心受压构件,绕对称轴失稳时易发生弯扭失稳,绕非对称轴时易发生弯曲失稳。
9、轴心受压构件失稳时可能绕两主轴屈曲,设计时应遵循等稳定原则,如进行梯形钢屋架设计时屋架端斜杆应采用不等边角钢长肢相连的截面型式。
10、在轴心受压构件中,确定箱形截面板件满足局部稳定的宽(高)厚比限值的原则是构件应力达到屈服前其板件不发生局部屈曲(或局部屈曲临界应力不低于屈服应力,或不先于屈服),确定工字形截面确定板件宽(高)厚比限值的原则是构件整体屈曲前其板件不发生局部屈曲(或局部屈曲临界应力不低于整体屈曲临界应力或等稳定或不先于整体失稳)。
11、荷载作用点的位置对梁的整体稳定有影响,相对于荷载作用于工字形截面简支梁受拉翼缘,当荷载作用于梁的受压翼缘时,其梁的整体稳定性将降低。
12、某梯形钢屋架,下弦支座处应设置刚性系杆,该系杆需要按受压杆设计。
13、 某工字形组合截面简支梁,若腹板的高厚比为100,应设置 横向 加劲肋,若腹板高厚比为210,应设置 纵向 加劲肋。
二、单项选择题(每题2分,共14分)1、 最易产生脆性破坏的应力状态是 B 。
哈工大 2001 年春季学期结构力学试卷(请考生注意:本试卷共5页)一.是非题(将判断结果填入括弧:以O 表示正确,X 表示错误)(本大题分4小题,共11分)1 . (本小题 3分)图示结构中DE 杆的轴力F NDE =F P /3。
( ).2 . (本小题 4分)用力法解超静定结构时,只能采用多余约束力作为基本未知量。
( ) 3 . (本小题 2分)力矩分配中的传递系数等于传递弯矩与分配弯矩之比,它与外因无关。
() 4 . (本小题 2分)用位移法解超静定结构时,基本结构超静定次数一定比原结构高。
( )二.选择题(将选中答案的字母填入括弧内)(本大题分5小题,共21分)1 (本小题6分)图示结构EI=常数,截面A 右侧的弯矩为:( ) A .2/M ; B .M ; C .0; D. )2/(EI M 。
2. (本小题4分)图示桁架下弦承载,下面画出的杆件内力影响线,此杆件是:( ) A.ch ; B.ci; C.dj; D .cj .3. (本小题 4分)图a 结构的最后弯矩图为:A. 图b;B. 图c;C. 图d;D.都不对。
( )( a) (b) (c) (d)4. (本小题 4分)用图乘法求位移的必要条件之一是:A.单位荷载下的弯矩图为一直线;2=1/4 M /8 M /2B.结构可分为等截面直杆段;C.所有杆件EI 为常数且相同;D.结构必须是静定的。
( ) 5. (本小题3分)图示梁A 点的竖向位移为(向下为正):( )A.F P l 3/(24EI ); B . F P l 3/(!6EI ); C . 5F P l 3/(96EI ); D. 5F P l 3/(48EI ).三(本大题 5分)对图示体系进行几何组成分析。
四(本大题 9分)图示结构B 支座下沉4 mm ,各杆EI=2.0×105 kN ·m 2,用力法计算并作M 图。
五(本大题 11分) 用力矩分配法计算图示结构,并作M 图。
结构动力学作业姓名:学号:目录1.力插值法 (1)1.1分段常数插值法 (1)1.2分段线性插值法 (4)2.加速度插值法 (7)2.1常加速度法 (7)2.2线加速度法 (9)附录 (12)分段常数插值法源程序 (12)分段线性插值法源程序 (12)常加速度法源程序 (13)线加速度法源程序 (13)1.力插值法力插值法对结构的外荷载进行插值,分为分段常数插值法和分段线性插值法,这两种方法均适用于线性结构的动力反应计算。
1.1分段常数插值法图1-1为一个单自由度无阻尼系统,结构的刚度为k ,质量为m ,位移为y (t ),施加的外力为P (t )。
图1-2为矩形脉冲荷载的示意图,图中t d 表示作用的时间,P 0表示脉冲荷载的大小。
图1-1 单自由度无阻尼系统示意图图1-2 矩形脉冲荷载示意图对于一个满足静止初始条件的无阻尼单自由度体系来说,当施加一个t d 时间的矩形脉冲荷载,此时结构在t d 时间内的位移反应可以用杜哈梅积分得到:0()sin ()2 (1cos )(1cos ) (0)tst st d P y t t d m ty t y t t Tωττωπω=-=-=-≤≤⎰(1-1)如果结构本身有初始的位移和速度,那么叠加上结构自由振动的部分,结构的位移反应为:002()cos sin (1cos) (0)st d yty t y t t y t t Tπωωω=++-≤≤ (1-2)图1-3分段常数插值法微段示意图对于施加于结构任意大小的力,将其划分为Δt 的微段,每一段的荷载都为一个常数(每段相当于一个矩形的脉冲荷载),如图1-3所示,则将每一段的位移和速度写成增量的形式为:1cos t sin t (1cos t)i ii i yP y y kωωωω+=∆+∆+-∆ (1-3)i+1/sin t cos t sin t i ii yP yy kωωωωω=-∆+∆+∆ (1-4)程序流程图如下图1-4分段常数插值法流程图根据流程图可以编写相应的算法,利用MATLAB 进行编程,程序源代码见附录。
结构动力学试卷
(2008秋,研究生学位课程)
姓名: 学号: 得分:
第一部分:非主观性试题(共20分)
回答下面问题。
(共20分)
(1) 何谓结构动力特性?(4分)
(2) 简述结构线性振动与非线性振动的区别;(4分) (3) 简述线加速度法计算精度受哪些因素影响;( 6分) (4) 试确定下面图(a ),(b )体系的动力自由度;(6分)
第二部分:主观性试题(共80分)
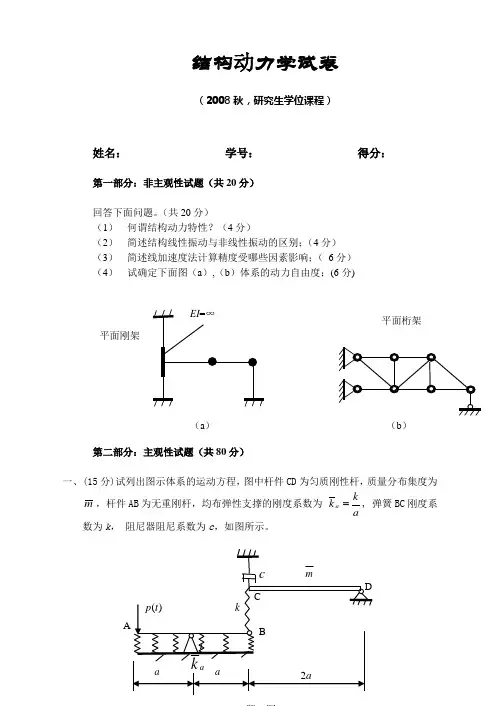
一、(15分)试列出图示体系的运动方程,图中杆件CD 为匀质刚性杆,质量分布集度为
m ,杆件AB 为无重刚杆,均布弹性支撑的刚度系数为 a k
k a
, 弹簧BC 刚度系数为k , 阻尼器阻尼系数为c ,如图所示。
(a ) 平面刚架
平面桁架
题一图
二、(20分)试求题二图所示体系:(1)自振周期;(2)阻尼比;(3)稳态振幅。
质点质量为m , 阻尼系数为C ,各杆为无重杆,各杆尺寸与刚度如图所示,ω=2θ。
二、 (20分)试求题三图所示体系的稳态振幅。
0sin t
θ
()sin p t p t
θ=题三图 ()sin p t p t
θ=题三图
四、(15分)对题四图所示结构,试:(1)列出振型方程,并写出边界条件;(2)求稳态振幅。
不计杆BC 段质量。
五、(10分)试求题五图所示结构各构件的一致刚度矩阵与一致质量矩阵,并集成结
构的刚度与质量矩阵。
题五图
,
m
P P 0=(1,0,2)
,0,(1,0,3)(1,
0,4)(1,0,5)。
填空∙路基的干湿类型划分为4类,即(干燥,中湿,潮湿,过湿)。
∙路基路面整体结构应有足够的承载能力,体现在(强度)和(刚度)两方面。
∙路基的最小填土高度,一般应保证路基处于(干燥)或(中湿)状态。
∙为避免挖方边坡零星土块下落堆积,保护边沟不致阻塞,可在挖方坡脚处设置(碎落台)。
∙在重力式挡土墙中,为了减少圬工砌体因硬化收缩和温度变化作用而产生的裂缝,须设置(伸缩缝)。
∙衡量土基压实程度的指标是(干容重)。
∙普通水泥混凝土路面的抗滑标准以(构造深度)为指标表示。
∙对于柔性路面,当采用两层沥青混凝土面层时,为增加层与层间的结合,应在中间设置(粘层)。
∙公路自然区划中二级区划得划分主要以(潮湿系数)为依据。
∙挡土墙按(极限状态设计的分项系数法)进行设计。
∙为防止挡土墙(不均匀沉降)引起强身开裂应设置沉降缝。
∙在排水纵坡陡于10%水头高差大于1米的陡坡地段,可以设置(跌水)和(急流槽)排除。
∙(跌水)和(急水槽)是地面排水沟渠的两种特殊方式,通常设在都坡处。
∙常用的坡面防护设施有(植物防护)和(工程防护)。
∙路基的典型横断面型式可分为(路堑)(路堤)和(填挖结合)等三种类型。
∙土基回弹模量可以采用(查表法)(现场实测法)室内试验法,换算法等方法获得。
∙《公路沥青路面设计规范》规定,路面设计以(双轮组单轴轴载100KN)为标准轴载,以(BZZ-100)表示。
∙石灰土中,石灰质量应符合(Ⅲ)级以上标准。
∙一班沥青混合料具有较高的(抗压)强度。
∙水泥混凝土路面以(抗弯拉强度)作为设计控制指标,用(劈裂实验)试验方法确定。
∙路基的填筑方法可分为(分层平铺),(竖向填筑)。
∙河滩路堤在水位变化时,除了受外力及自重外,还要受到(浮力),(动水压力)作用。
∙《公路沥青路面设计规范》规定,路面设计应采用(双圆垂直均布荷载)作用下的(多层弹性层状体系)理论,以(设计弯沉值)为路面整体刚度的设计指标。
∙沥青混合料的沥青最佳用量,通常以(马歇尔)试验来确定。

Harbin Institute of Technology机械原理大作业一课程名称:机械原理设计题目:连杆运动分析院系:机电工程学院班级:设计者:学号:指导教师:明设计时间: 2013年6月25日1、运动分析题目在图1-10中所示的干草压缩机中,已知LAB=150mm,LBC=600mm,LCE=120mm,LCD=500mm,LEF=600mm,XD=400mm,YD=500mm,YF=600mm,曲柄1作等速转动,其转速n1=50r/min。
求在一个运动循环中活塞5的位移、速度和加速度的变化曲线。
图1-102、机构的结构分析(1)基本杆组的划分①AB即杆件1为原动件②DECB即杆件2、3为RRR型II级杆组,其中CE为同一构件上点。
③ EF 和滑块即4、5为RRP 型II 级杆组(2)、建立以点A 为原点的固定平面直角系3、确定已知参数和求解流程(1)原动件1(I 级杆组RR )如图所示,已知原动件1的转角πϕ2~01=原动件杆1的角速度s rad /236.51=ω原动件1的角加速度01=α运动副A 的位置坐标0,0==A A y x运动副A 的速度0,0==yA xA v v运动副A 的加速度0,0==yA xA a a原动件杆I 的长度mm l 1501=可求出B 的位置B 的速度B 的加速度(2)构件2、3(II 级杆组RRR )D 的位置500400==D D y xD 的速度 00==yD xD v vD 的加速度00==yD xD a a杆长mm l l CD j 500==,mm l l BC i 600==由关系j j D i i B C l x l x x ϕϕcos cos +=+=j j D i i B C l y l y y ϕϕsin sin +=+=其中)(20sin cos B D i i i x x l A C B A -==-+ ϕϕ)(2B D i y y l B -=222j BD i l l l C -+=222)()(B D B D BD y y X x l -+-=可解得C A C B A B i +-++=222arctan 2ϕ DC D C j x x y y --=arctan ϕ 由上面两个式子可以得到两杆的角速度 1)()(G y y s x x c w B D j B D j i i -+-==•ϕ132G s G c G ij i i +==ϕα其中i j j i s c s c G -=1,i i i l c ϕcos =,i i i l s ϕsin =,j j j l c ϕcos =,j j j l s ϕsin =可得E 的位置iB E iB E y y x x ϕϕsin 480cos 480+=+=E 的速度 i i yB E yE i i xB E xE v yv v x v ωϕωϕcos 480sin 480+==-==E 的加速度i i i i xB E xE a xa αϕωϕsin 480cos 4802--== i i i i yB E yE a ya ϕαϕωcos 480sin 4802+-== (3)、构件4、5杆组(II 级杆组RRP )在建立的坐标系中取一参考点K 600,0==K K y x则速度0,0==yK xK v v加速度0,0==yK xK a a杆长mm l EF 600=,设F 位移为s由s x l x x K i EF E F +=+='cos ϕ K i EF E F y l y y =+='sin ϕ由上面两个式子可以得到 600600arcsin arcsin'E EF E k i y l y y -=-=ϕ所以:F 点位移 )600600arcsin(cos 600E E F y x x s -+== 速度F F xv = 加速度F F xa =四、编程计算并输出结果(VB 编程)主程序:Private Sub Command1_Click()Dim s5(3600) As DoubleDim v5(3600) As DoubleDim a5(3600) As DoubleDim pi As DoubleDim pa As Doublepi = 3.1415926pa = pi / 180Dim i As LongDim f1(3600) As Double Dim RR1 As RRDim RR2 As RRDim RRR1 As RRRDim RRP1 As RRPSet RR1 = New RRSet RR2 = New RRSet RRR1 = New RRRSet RRP1 = New RRPFor i = 0 To 3600 Step 1 f1(i) = i * pa / 10RR1.delt = 0RR1.f = f1(i)RR1.w = 5.24RR1.e = 0RR1.L = 150RR1.xA = 0RR1.yA = 0RR1.vxA = 0RR1.vyA = 0RR1.axA = 0RR1.ayA = 0RR1.calRRR1.Li = 600RRR1.Lj = 500RRR1.xB = RR1.xBRRR1.yB = RR1.yBRRR1.vxB = RR1.vxBRRR1.vyB = RR1.vyBRRR1.axB = RR1.axBRRR1.ayB = RR1.ayBRRR1.xD = 400RRR1.yD = 500RRR1.vxD = 0RRR1.vyD = 0RRR1.axD = 0RRR1.ayD = 0RRR1.M = 1RRR1.calRRRRR2.delt = 0RR2.f = RRR1.fi RR2.w = RRR1.wi RR2.e = RRR1.ei RR2.L = 480RR2.xA = RR1.xB RR2.yA = RR1.yB RR2.vxA = RR1.vxB RR2.vyA = RR1.vyB RR2.axA = RR1.axB RR2.ayA = RR1.ayB RR2.calRRP1.Li = 600RRP1.Lj = 0RRP1.fj = piRRP1.wj = 0RRP1.ej = 0RRP1.xB = RR2.xB RRP1.yB = RR2.yB RRP1.vxB = RR2.vxB RRP1.vyB = RR2.vyB RRP1.axB = RR2.axB RRP1.ayB = RR2.ayB RRP1.xK = 0RRP1.yK = 600RRP1.vxK = 0RRP1.vyK = 0RRP1.axK = 0RRP1.ayK = 0RRP1.M = 1RRP1.cals5(i) = RRP1.ssv5(i) = RRP1.vssa5(i) = RRP1.assNext iPicture1.Scale (-30, 700)-(360, 580)Picture1.Line (0, 0)-(360, 0) 'XPicture1.Line (0, 580)-(0, 700) 'YFor i = 0 To 360 Step 10 'X轴坐标Picture1.DrawStyle = 2Picture1.Line (i, 700)-(i, 580)Picture1.CurrentX = i - 10: Picture1.CurrentY = 0 Picture1.Print iNext iFor i = 580 To 700 Step 10 'Y轴坐标Picture1.DrawStyle = 2Picture1.Line (0, i)-(360, i)Picture1.CurrentX = -10: Picture1.CurrentY = iPicture1.Print iNext iFor i = 0 To 3600 Step 1Picture1.PSet (i / 10, s5(i))Next iEnd SubRR:Public L As DoublePublic f As DoublePublic delt As DoublePublic w As DoublePublic e As DoublePublic xA As DoublePublic yA As DoublePublic vxA As DoublePublic vyA As DoublePublic axA As DoublePublic ayA As DoublePublic xB As DoublePublic yB As DoublePublic vxB As DoublePublic vyB As DoublePublic axB As DoublePublic ayB As DoublePublic Sub cal()xB = xA + L * Cos(f + delt)yB = yA + L * Sin(f + delt)vxB = vxA - w * L * Sin(f + delt)vyB = vyA + w * L * Cos(f + delt)axB = axA - w ^ 2 * L * Cos(f + delt) - e * L * Sin(f + delt) ayB = ayA - w ^ 2 * L * Sin(f + delt) + e * L * Cos(f + delt) End SubRRR:Public Li As DoublePublic Lj As DoublePublic fi As DoublePublic fj As DoublePublic wi As DoublePublic wj As DoublePublic ei As DoublePublic ej As DoublePublic xB As DoublePublic yB As DoublePublic vxB As DoublePublic vyB As DoublePublic axB As DoublePublic ayB As DoublePublic xC As DoublePublic yC As DoublePublic vxC As DoublePublic vyC As DoublePublic axC As DoublePublic ayC As DoublePublic xD As DoublePublic yD As DoublePublic vxD As DoublePublic vyD As DoublePublic axD As DoublePublic ayD As DoublePublic M As DoublePublic Sub calRRR()Dim fDB As DoubleDim Ci As DoubleDim Cj As DoubleDim Si As DoubleDim Sj As DoubleDim G1 As DoubleDim G2 As DoubleDim G3 As DoubleDim LBD As DoubleDim JCBD As DoubleDim val As Doublepi = 3.1415926LBD = Sqr((xB - xD) ^ 2 + (yD - yB) ^ 2)If LBD < Li + Lj And LBD > Abs(Li - Lj) Thenval = (Li ^ 2 + LBD ^ 2 - Lj ^ 2) / (2 * Li * LBD) JCBD = Atn(-val / Sqr(-val * val + 1)) + 2 * Atn(1) End IfRRP:Public Li As DoublePublic Lj As DoublePublic fi As DoublePublic fj As DoublePublic wi As DoublePublic wj As DoublePublic ei As DoublePublic ej As DoublePublic xB As DoublePublic yB As DoublePublic vxB As DoublePublic vyB As DoublePublic axB As DoublePublic ayB As DoublePublic xK As DoublePublic yK As DoublePublic vxK As DoublePublic vyK As DoublePublic axK As DoublePublic ayK As DoublePublic xC As DoublePublic yC As DoublePublic vxC As DoublePublic vyC As DoublePublic axC As DoublePublic ayC As DoublePublic xD As DoublePublic yD As DoublePublic vxD As DoublePublic vyD As DoublePublic axD As DoublePublic ayD As DoublePublic M As SinglePublic ss As DoublePublic vss As DoublePublic ass As DoublePublic Sub cal()Dim A0 As DoubleDim Q1 As DoubleDim Q2 As DoubleDim Q3 As DoubleDim Q4 As DoubleDim Q5 As DoubleDim val As DoubleDim pi As Doublepi = 3.14159216A0 = Lj + ((yK - yB) * Cos(fj) - (xK - xB) * Sin(fj)) val = A0 / Lifi = M * Atn(val / Sqr(-val * val + 1)) + fjxC = xB + Li * Cos(fi)yC = yB + Li * Sin(fi)ss = (xC - xK) * Cos(fj) + (yC - yK) * Sin(fj)xD = xK + ss * Cos(fj)yD = yK + ss * Sin(fj)Q1 = vxK - vxB - wj * (ss * Sin(fj) + Lj * Cos(fj))Q2 = vyK - vyB + wj * (ss * Cos(fj) - Lj * Sin(fj))Q3 = Li * Sin(fi) * Sin(fj) + Li * Cos(fi) * Cos(fj) wi = (-Q1 * Sin(fj) + Q2 * Cos(fj)) / Q3vss = -(Q1 * Li * Cos(fi) + Q2 * Li * Sin(fi)) / Q3vxC = vxB - wi * Li * Sin(fi)vyC = vyB + wi * Li * Cos(fi)vxD = vxK + vss * Cos(fj) - ss * wj * Sin(fj)vyD = vyK + vss * Sin(fj) + ss * wj * Cos(fj)Q4 = axK - axB + wi ^ 2 * Li * Cos(fi) - ej * (ss * Sin(fj) + Lj * Cos(fj)) - wj ^ 2 * (ss * Cos(fj) - Lj * Sin(fj)) - 2 * vss * wj * Sin(fj)Q5 = ayK - ayB + wi ^ 2 * Li * Sin(fi) + ej * (ss * Cos(fj) - Lj * Sin(fj)) - wj ^ 2 * (ss * Sin(fj) + Lj * Cos(fj)) + 2 * vss * wj * Cos(fj)ei = (-Q4 * Sin(fj) + Q5 * Cos(fj)) / Q3ass = (-Q4 * Li * Cos(fi) - Q5 * Li * Sin(fi)) / Q3axC = axB - ei * Li * Sin(fi) - wi ^ 2 * Li * Cos(fi)ayC = ayB + ei * Li * Cos(fi) - wi ^ 2 * Li * Sin(fi)axD = axK + ass * Cos(fj) - ss * ej * Sin(fj) - ss * wj ^ 2 * Cos(fj) - 2 * vss * wj * Sin(fj) ayD = ayK + ass * Sin(fj) + ss * ej * Cos(fj) - ss * wj ^ 2 * Sin(fj) + 2 * vss * wj * Cos(fj) End Sub五、计算结果数据如图:位移曲线:速度曲线:加速度曲线:六、计算结果分析主动件转角为0时,滑块的位移为628mm,随着转角的匀速增加,滑块位移先上升,速度为负快速下降,加速度为负且开始值较小并逐渐下降,到达最低点-2200左右,此时速度为0, 然后位移开始继续下降,速度继续下降,然后到达最小值-100左右,此时加速度为0,又开始上升(向左运动),速度正向增大,在后面一段时期速度继续增大,加速度也正向增大,然后速度下降,加速度下降.滑块分别在4.2s,11.4s速度达到正向最大,1.7s,7.7s速度达到负向最大,0.8s,2.7s,5.8s,9.6s加速度达到极值,滑块就是这样周期性的左右运动。
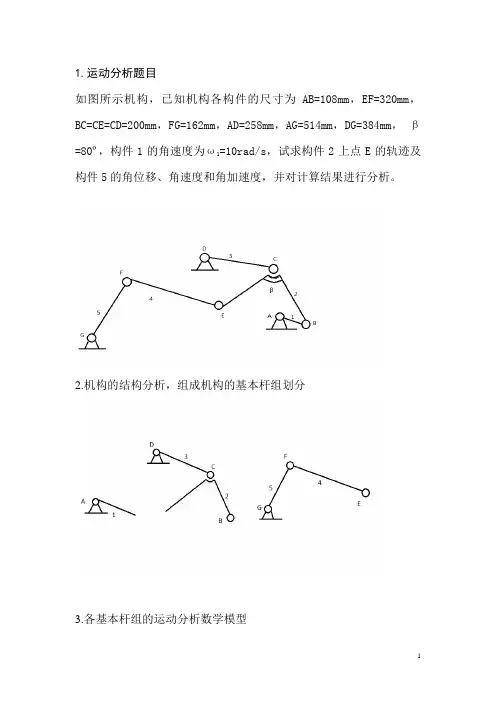
1.运动分析题目如图所示机构,已知机构各构件的尺寸为AB=108mm,EF=320mm,BC=CE=CD=200mm,FG=162mm,AD=258mm,AG=514mm,DG=384mm,β=80º,构件1的角速度为ω1=10rad/s,试求构件2上点E的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。
2.机构的结构分析,组成机构的基本杆组划分3.各基本杆组的运动分析数学模型(1)RR基本杆组:delt=0xB = xA + AB * Cos(f + delt)yB = yA + AB* Sin(f + delt)vxB = vxA - w * AB * Sin(f + delt)vyB = vyA + w * AB* Cos(f + delt)axB = axA - w ^ 2 * AB * Cos(f + delt):ayB = ayA - w ^ 2 * AB* Sin(f + delt)(2)RRR基本杆组Ci = lbc * Cos(fbc)Si = lbc * Sin(fbc)Cj = lcd * Cos(fcd)Sj = lcd * Sin(fcd)G1 = Ci * Sj - Cj * Siwbc = (Cj * (vxD - vxB) + Sj * (vyD - vyB)) / G1wcd = (Ci * (vxD - vxB) + Si * (vyD - vyB)) / G1vxC = vxB - wbc * lbc * Sin(fbc)vyC = vyB + wbc * lbc * Cos(fbc)G2 = axD - axB + wbc ^ 2 * Ci - wcd ^ 2 * CjG3 = ayD - ayB + wbc ^ 2 * Si - wcd ^ 2 * Sjebc = (G2 * Cj + G3 * Sj) / G1ecd = (G2 * Ci + G3 * Si) / G1axC = axB - ebc * lbc * Sin(fbc) - wbc ^ 2 * lbc * Cos(fbc)ayC = ayB + ebc * lbc * Cos(fbc) - wbc ^ 2 * lbc * Sin(fbc)EB = 2 * BC * Cos(febc)xE = xB + EB* Cos(fbc + febc)yE = yB + EB * Sin(fbc + febc)vxE = vxB – wbc * EB* Sin(fbc + febc)vyE = vyB + wbc * EB* Cos(fbc + febc)axE = axB - wbc ^ 2 * EB * Cos(fbc + delt) - ebc * EB * Sin(fbc + febc)ayE = ayB - wbc ^ 2 * leb * Sin(fbc + delt) + ebc * leb * Sin(fbc + febc) Ci = lef * Cos(fef)Si = lef * Sin(fef)Cj = lfg * Cos(ffg)Sj = lfg * Sin(ffg)G1 = Ci * Sj - Cj * Siwef = (Cj * (vxG - vxE) + Sj * (vyG - vyE)) / G1wfg = (Ci * (vxG - vxE) + Si * (vyG - vyE)) / G1vxF = vxE - wef * lef * Sin(fef)vyF = vyE + wef * lef * Cos(fef)G2 = axG - axE + wef ^ 2 * Ci - wfg ^ 2 * CjG3 = ayG - ayE + wef ^ 2 * Si - wfg ^ 2 * Sjeef = (G2 * Cj + G3 * Sj) / G1efg = (G2 * Ci + G3 * Si) / G1axF = axE - eef * lef * Sin(fef) - wef ^ 2 * lef * Cos(fef)ayF = ayE + eef * lef * Cos(fef) - wef ^ 2 * lef * Sin(fef)4.计算编程Dim xA As DoubleDim yA As DoubleDim vxA As DoubleDim vyA As DoubleDim axA As Double 'A '点加速度x轴分量Dim ayA As Double 'A '点加速度y轴分量Dim xB As Double 'B'点'x轴坐标Dim yB As Double 'B点y轴坐标Dim vxB As Double 'B点速度x轴分量Dim vyB As Double 'B点速度y轴分量Dim axB As Double 'B点加速度x轴分量Dim ayB As Double 'B点加速度y轴分量Dim xC As Double 'C点x轴坐标Dim yC As Double C'点y轴坐标Dim vxC As Double 'C点速度x轴分量Dim vyC As Double 'C点速度y轴分量Dim axC As Double 'C点加速度x轴分量Dim ayC As Double 'C点加速度y轴分量Dim xD As Double 'D点x轴坐标Dim yD As Double 'D点y轴坐标Dim vxD As Double 'D点速度x轴分量Dim vyD As Double 'D点速度y轴分量Dim axD As Double 'D点加速度x轴分量Dim ayD As Double 'D点加速度y轴分量Dim xE As Double 'E点x轴坐标Dim yE As Double 'E点y轴坐标Dim vxE As Double 'E点速度x轴分量Dim vyE As Double 'E点速度y轴分量Dim axE As Double 'E点加速度x轴分量Dim ayE As Double 'E点加速度y轴分量Dim xF As Double 'F点x轴坐标Dim yF As Double 'F点y轴坐标Dim vxF As Double 'F点速度x轴分量Dim vyF As Double 'F点速度y轴分量Dim axF As Double 'F点加速度x轴分量Dim ayF As Double 'F点加速度y轴分量Dim xG As Double 'G点x轴坐标Dim yG As Double 'G点y轴坐标Dim vxG As Double 'G点速度x轴分量Dim vyG As Double 'G点速度y轴分量Dim axG As Double 'G点加速度x轴分量Dim ayG As Double 'G点加速度y轴分量Dim delt As Double ' AB杆初始转角Dim lab As Double 'AB杆长Dim lbc As Double 'BC杆长Dim lcd As Double ' CD杆长Dim lce As Double 'CE杆长Dim lef As Double 'EF杆长Dim lfg As Double 'FG杆长Dim leb As Double 'ED杆长Dim f As Double 'AB杆转角Dim fbc As Double 'BC杆转角Dim fcd As Double 'CD杆转角Dim fce As Double 'CE杆转角Dim fef As Double 'EF杆转角Dim ffg As Double 'FG杆转角Dim fge As Double 'ge杆转角Dim w As Double 'AB杆角速度Dim wbc As Double ' BC角速度Dim wcd As Double 'CD角速度Dim wce As Double 'CE角速度Dim wef As Double 'EF角速度Dim wfg As Double 'FG角速度Dim e As Double 'AB杆角加速度Dim ebc As Double ' BC杆角加速度Dim ecd As Double 'CD杆角加速度Dim ece As Double 'CE杆角加速度Dim eef As Double 'EF杆角加速度Dim efg As Double 'FG杆角加速度Dim LBD As Double 'BD距离Dim leg As Double 'EG距离Dim JCBD As Double '角CBDDim jfeg As Double '角FEGDim fBD As Double 'BD转角Dim feg As Double 'EG转角Dim Ci As DoubleDim Cj As DoubleDim Si As DoubleDim Sj As DoubleDim G1 As DoubleDim G2 As DoubleDim G3 As DoubleDim val As DoubleDim pi As DoubleDim pa As DoubleDim febc As Double '角EBCDim i As DoubleDim fj1 As DoublePrivate Sub Command1_Click() '求点E的轨迹Picture1.Scale (-300, 400)-(10, -15)Picture1.Line (-300, 0)-(10, 0) 'XPicture1.Line (0, 400)-(0, -15) 'YFor i = -300 To 0 Step 50 'X轴坐标Picture1.DrawStyle = 2Picture1.Line (i, 400)-(i, 0)Picture1.CurrentX = i - 10: Picture1.CurrentY = 0 Picture1.Print iNext iFor i = 0 To 350 Step 50 'Y轴坐标Picture1.DrawStyle = 2Picture1.Line (0, i)-(-400, i)Picture1.CurrentX = -20: Picture1.CurrentY = i + 7 Picture1.Print iNext iFor fj1 = 0 To 360 Step 0.01f = fj1 * paCall RR1Call RRR1Call RR2Picture1.PSet (xE, yE)Next fj1End SubPrivate Sub Command2_Click() '求构件5的角位移Picture2.Scale (-20, 5)-(380, -0.5)Picture2.Line (-20, 0)-(380, 0) 'XPicture2.Line (0, 3)-(0, -0.5) 'YFor i = 0 To 360 Step 30 'X轴坐标Picture2.DrawStyle = 2Picture2.Line (i, 3)-(i, 0)Picture2.CurrentX = i - 10: Picture2.CurrentY = 0 Picture2.Print iNext iFor i = -0.5 To 3 Step 0.5 'Y轴坐标Picture2.Line (0, i)-(380, i)Picture2.CurrentX = -25: Picture2.CurrentY = i Picture2.Print iNext iFor fj1 = 0 To 360 Step 0.01f = fj1 * paCall RR1Call RRR1Call RR2Call RRR2Picture2.PSet (fj1, ffg)Next fj1End SubPrivate Sub Command3_Click() '求构件5的角速度Picture3.Scale (-20, 10)-(380, -10)Picture3.Line (-20, 0)-(380, 0) 'XPicture3.Line (0, 10)-(0, -10) 'YFor i = 0 To 360 Step 30 'X轴坐标Picture3.DrawStyle = 2Picture3.Line (i, 10)-(i, -10)Picture3.CurrentX = i - 10: Picture3.CurrentY = 0 Picture3.Print iNext iFor i = -8 To 8 Step 2 'Y轴坐标Picture3.Line (0, i)-(380, i)Picture3.CurrentX = -20: Picture3.CurrentY = i Picture3.Print iNext iFor fj1 = 0 To 360 Step 0.01f = fj1 * paCall RR1Call RRR1Call RR2Call RRR2Picture3.PSet (fj1, wfg)Next fj1End SubPrivate Sub Command4_Click() '求构件5的角加速度Picture4.Scale (-20, 300)-(380, -200)Picture4.Line (-20, 0)-(380, 0) 'XPicture4.Line (0, 300)-(0, -200) 'YFor i = 0 To 360 Step 30 'X轴坐标Picture4.DrawStyle = 2Picture4.Line (i, 300)-(i, -200)Picture4.CurrentX = i - 10: Picture4.CurrentY = 0 Picture4.Print iNext iFor i = -200 To 300 Step 50 'Y轴坐标Picture4.Line (0, i)-(380, i)Picture4.CurrentX = -25: Picture4.CurrentY = i + 5 Picture4.Print iNext iFor fj1 = 0 To 360 Step 0.01f = fj1 * paCall RR1Call RRR1Call RR2Call RRR2Picture4.PSet (fj1, efgNext fj1End SubPrivate Sub Form_Load() '赋初值lab = 108lce = 200lbc = 200lcd = 200lef = 320lfg = 162w = 10e = 0delt = 0xA = 0yA = 0vyA = 0axA = 0ayA = 0xD = -178.311284yD = 186.464704vxD = 0vyD = 0axD = 0ayD = 0xG = -514yG = 0vxG = 0vyG = 0axG = 0ayG = 0pi = 3.1415926pa = pi / 180febc = pa * 50End SubPrivate Sub RR1() 'RR基本杆组xB = xA + lab * Cos(f + delt)yB = yA + lab * Sin(f + delt)vxB = vxA - w * lab * Sin(f + delt)vyB = vyA + w * lab * Cos(f + delt)axB = axA - w ^ 2 * lab * Cos(f + delt) - e * lab * Sin(f + delt)ayB = ayA - w ^ 2 * lab * Sin(f + delt) + e * lab * Sin(f + delt)End SubPrivate Sub RR2() 'RR基本杆组leb = 2 * lbc * Cos(febc)xE = xB + leb * Cos(fbc + febc)yE = yB + leb * Sin(fbc + febc)vxE = vxB - wbc * leb * Sin(fbc + febc)vyE = vyB + wbc * leb * Cos(fbc + febc)axE = axB - wbc ^ 2 * leb * Cos(fbc + delt) - ebc * leb * Sin(fbc + febc) ayE = ayB - wbc ^ 2 * leb * Sin(fbc + delt) + ebc * leb * Sin(fbc + febc) End SubPrivate Sub RRR1() 'RRR基本杆组LBD = Sqr((xD - xB) ^ 2 + (yD - yB) ^ 2)If LBD > lbc + lcd And LBD < Abs(lbc - lcd) ThenIf MsgBox("RRR杆组杆长不符合要求", vbOKOnly, "提示") = 1 Then EndEnd IfElseEnd IfIf LBD < lbc + lcd And LBD > Abs(lbc - lcd) Then val = (lbc ^ 2 + LBD ^ 2 - lcd ^ 2) / (2 * lbc * LBD) JCBD = Atn(-val / Sqr(-val * val + 1)) + 2 * Atn(1) ElseEnd IfIf LBD = lbc + lcd ThenJCBD = 0ElseEnd IfIf LBD = Abs(lbc - lcd) ThenIf lbc > lcd ThenJCBD = 0ElseEnd IfIf lbc < lcd ThenJCBD = piElseEnd IfElseEnd IfIf xD > xB And yD >= yB Then '第一象限fBD = Atn((yD - yB) / (xD - xB))ElseEnd IfIf xD = xB And yD > yB ThenfBD = pi / 2ElseEnd IfIf xD < xB And yD >= yB Then '第二象限fBD = pi + Atn((yD - yB) / (xD - xB))ElseEnd IfIf xD < xB And yD < yB Then '第三象限fBD = pi + Atn((yD - yB) / (xD - xB))ElseEnd IfIf xD = xB And yD < yB ThenfBD = 3 * pi / 2ElseEnd IfIf xD > xB And yD <= yB Then '第四象限fBD = 2 * pi + Atn((yD - yB) / (xD - xB))ElseEnd Iffbc = fBD - JCBDxC = xB + lbc * Cos(fbc)yC = yB + lbc * Sin(fbc)If xC > xD And yC >= yD Then '第一象限fcd = Atn((yC - yD) / (xC - xD))ElseEnd IfIf xC = xD And yC >= yD Thenfcd = pi / 2ElseEnd IfIf xC < xD And yC >= yD Then '第二象限fcd = pi + Atn((yC - yD) / (xC - xD))ElseEnd IfIf xC < xD And yC < yD Then '第三象限fcd = pi + Atn((yC - yD) / (xC - xD))ElseEnd IfIf xC = xD And yC < yD Thenfcd = 3 * pi / 2ElseEnd IfIf xC > xD And yC <= yD Then '第四象限fcd = 2 * pi + Atn((yC - yD) / (xC - xD))ElseEnd IfCi = lbc * Cos(fbc)Si = lbc * Sin(fbc)Cj = lcd * Cos(fcd)Sj = lcd * Sin(fcd)G1 = Ci * Sj - Cj * Siwbc = (Cj * (vxD - vxB) + Sj * (vyD - vyB)) / G1 wcd = (Ci * (vxD - vxB) + Si * (vyD - vyB)) / G1 vxC = vxB - wbc * lbc * Sin(fbc)vyC = vyB + wbc * lbc * Cos(fbc)G2 = axD - axB + wbc ^ 2 * Ci - wcd ^ 2 * CjG3 = ayD - ayB + wbc ^ 2 * Si - wcd ^ 2 * Sj ebc = (G2 * Cj + G3 * Sj) / G1ecd = (G2 * Ci + G3 * Si) / G1axC = axB - ebc * lbc * Sin(fbc) - wbc ^ 2 * lbc * Cos(fbc)ayC = ayB + ebc * lbc * Cos(fbc) - wbc ^ 2 * lbc * Sin(fbc)End SubPrivate Sub RRR2() 'RRR基本杆组leg = Sqr((xG - xE) ^ 2 + (yG - yE) ^ 2)If leg > lef + lfg And leg < Abs(lef - lfg) ThenIf MsgBox("RRR杆组杆长不符合要求", vbOKOnly, "提示") = 1 Then EndElseEnd IfElseEnd IfIf leg < lef + lfg And leg > Abs(lef - lfg) Thenval = (lef ^ 2 + leg ^ 2 - lfg ^ 2) / (2 * lef * leg)jfeg = Atn(-val / Sqr(-val * val + 1)) + 2 * Atn(1)ElseEnd IfIf leg = lef + lfg Thenjfeg = 0ElseEnd IfIf leg = Abs(lef - lfg) ThenIf lef > lfg Thenjfeg = 0ElseEnd IfIf lef < lfg Thenjfeg = piElseEnd IfElseEnd IfIf xG > xE And yG >= yE Then '第一象限feg = Atn((yG - yE) / (xG - xE))ElseEnd IfIf xG = xE And yG > yE Thenfeg = pi / 2ElseEnd IfIf xG < xE And yG >= yE Then '第二象限feg = pi + Atn((yG - yE) / (xG - xE))ElseEnd IfIf xG < xE And yG < yE Then '第三象限feg = pi + Atn((yG - yE) / (xG - xE)) ElseEnd IfIf xG = xE And yG < yE Thenfeg = 3 * pi / 2ElseEnd IfIf xG > xE And yG <= yE Then '第四象限feg = 2 * pi + Atn((yG - yE) / (xG - xE)) ElseEnd Iffef = feg - jfegxF = xE + lef * Cos(fef)yF = yE + lef * Sin(fef)If xF > xG And yF >= yG Then '第一象限ffg = Atn((yF - yG) / (xF - xG))ElseEnd IfIf xF = xG And yF >= yG Thenffg = pi / 2ElseEnd IfIf xF < xG And yF >= yG Then '第二象限ffg = pi + Atn((yF - yG) / (xF - xG)) ElseEnd IfIf xF < xG And yF < yG Then '第三象限ffg = pi + Atn((yF - yG) / (xF - xG)) ElseEnd IfIf xF = xG And yF < yG Thenffg = 3 * pi / 2ElseEnd IfIf xF > xG And yF <= yG Then '第四象限ffg = 2 * pi + Atn((yF - yG) / (xF - xG)) ElseEnd IfCi = lef * Cos(fef)Si = lef * Sin(fef)Cj = lfg * Cos(ffg)Sj = lfg * Sin(ffg)G1 = Ci * Sj - Cj * Siwef = (Cj * (vxG - vxE) + Sj * (vyG - vyE)) / G1wfg = (Ci * (vxG - vxE) + Si * (vyG - vyE)) / G1vxF = vxE - wef * lef * Sin(fef)vyF = vyE + wef * lef * Cos(fef)G2 = axG - axE + wef ^ 2 * Ci - wfg ^ 2 * CjG3 = ayG - ayE + wef ^ 2 * Si - wfg ^ 2 * Sjeef = (G2 * Cj + G3 * Sj) / G1efg = (G2 * Ci + G3 * Si) / G1axF = axE - eef * lef * Sin(fef) - wef ^ 2 * lef * Cos(fef)ayF = ayE + eef * lef * Cos(fef) - wef ^ 2 * lef * Sin(fef)End Sub5.结果及分析图1 E点的运动轨迹(1)由图1所示,E点的运动轨迹呈稍倾斜“8字形”。
哈工大结构力学试卷参考答案呼伦贝尔学院建筑工程学院《结构力学》试卷1参考答案考试时间120分钟满分100分学院专业级班姓名学号题号得分评卷人一二三四总分能够减少自由度的装置称为约束。
5、图6所示结构的超静定次数是 6 次,此结构位移法基本未知量的个数是 6 个。
6、结构力学的研究对象是杆件结构。
图67、利用位移计算总公式计算结构位移时,对于桁架只须考虑轴力项,对于梁和刚架只须考虑弯矩项,对于拱要考虑弯矩、轴力项。
三、单项选择题(2分×10题,共20分) 1、下列结构内力只有轴力的是(C )。
A、梁 B、刚架 C、桁架 D、拱2、图7所示平面体系的几何组成性质是( D )。
A、几何不变且无多余约束 B、几何可变C、几何不变且有多余约束D、几何瞬变图73、当一个竖向单位荷载沿结构移动时,表示某一量值变化规律的图形是(C )。
A、弯矩图B、轴力图C、影响线D、剪力图 4、三个刚片用三个铰两两联结而成的体系是( D )。
A、几何不变B、几何可变C、几何瞬变D、以上三者均有可能 5、静定结构在几何构造上的特征是( D )。
A、有多余约束 B、计算自由度W等于零一、判断题(对的打“√”错的打“×”,2分×5题,共10分) 1、静定结构受温度改变影响会产生内力。
(× )2、所谓零秆,既该杆的轴力为零,故从该静定结构去掉,并不影响结构的功能。
(× )3、如图1所示为某超静定刚架对应的力法基本体系,其力法方程的主系数δ36/EI。
(× )4、如图25所示结构的M图是正确的。
(√)X1 EI pl pl s θ i (a)6m l 22是X2 2EI M图p s θ i (b) 6m 图1 l图2 l 图3 5、如图3所示,(a)与(b)所示梁A端的转动刚度示相同的。
(√ ) l/2 l/2 l 二、填空题(每空1分,共15分)ql 2q B 1、图4所示结构支座A的支座反力为 3ql ,方向向上,B截面的剪力为 3ql/2 ,2A C、无多余约束 D、几何不变,且无多余约束 6、位移法的基本未知量是( A)。
H a r b i n I n s t i t u t e o f T e c h n o l o g y机械设计大作业题目:V带设计院系:能源科学与工程学院班级:1202104姓名:刘翼学号:1120200623指导教师:张锋©哈尔滨工业大学目录一 任务书 (1)二 选择电动机 (2)三 确定设计功率d P (2)四 选择带的型号 (2)五 确定带轮的基准直12d d d d 和 (2)六 验算带的速度 (3)七 确定中心距a 和V 带基准长d L (3)八 计算小轮包1 (3)九 确定 V 带Z (3)十 确定初拉0F (4)十一 计算作用在轴上的压Q (5)十二 带轮结构计 (5)十三 参考文献 (6)一哈尔滨工业大学 机械设计作业任务书题目:带式运输机结构简图见下图:原始数据如下:机器工作平稳,单向回转,成批生产方案 d P (KW ) (/min)m n r(/min)w n r1i轴承座中心高H (mm )最短工作 年限L 工作环境 5.1.42.2940802.11605年2班室内、清洁二 选择电动机 由方案图表中的数据要求,查参考文献[2]表15.1 Y 系列三相异步电动机的型号及相关数据选择可选择Y112M-6。
可查得轴径为28mm,长为60mm. 三 确定设计功率d P设计功率是根据需要传递的名义功率、载荷性质、原动机类型和每天连续工作的时间长短等因素共同确定的,表达式如下:d A m P K P =式中 m P ——需要传递的名义功率A K ——工作情况系数,按表2工作情况系数A K 选取A K =1.2;已知设计功率为2.2KW 。
四 选择带的型号查看教材图7.11可选取A 型带。
五 确定带轮的基准直径12d d d d 和查表3. V 带带轮最小基准直径min d d 知A 型带min d d =75mm,又由教材表7.3选取小带轮基准直径:mm d d 1251=;大带轮基准直径:mm d i d d d 5.2621251.212=⨯=⋅= 查教材表7.3选取大带轮基准直径mm d d 2502=;其传动比误差%50476.0%1001.21252501.2<=⨯-=∆i 故可用。
哈尔滨工业大学(威海)2011 / 2012 学年秋季学期理论力学试题卷(A)考试形式(开、闭卷):闭卷答题时间:120(分钟)本卷面成绩占课程成绩 80 %一、填空题(每题6分,共30分)1、图示滚轮的半径为R ,轮心速度为v,加速度为a,沿水平直线作纯滚动,M点加速度的大小为。
2、图示匀质细杆各以匀角速度ω绕轴O转动。
已知:杆长为l,重为P。
惯性力系向转轴O简化,主矢的大小为,主矩的大小为。
3、如图所示,物块重P =150N,靠在粗糙的水平天花板上,物体间静滑动摩擦因数f s=0.3,动滑动摩擦因数f =0.2, 在物块上加一力F,且F =200N,θ=30°,摩擦力大小为。
教研室主任签字:姓名:班级:学号:遵守考试纪律注意行为4、如图所示结构受集中力P 作用,各杆自重不计。
则杆1的内力为 。
(须注明拉、压)5、如图所示,沿长方体的三个不相交且不平行的棱作用着3个大小相等的力F ,若力系简化为一合力,求棱a ,b ,c 的关系 。
二、计算题(10分)如图所示简支梁,不计梁的重量,在C 处作用一铅垂力P 。
试求支座B 处的约束力(要求用虚位移原理求解,用其它方法做不给分)。
遵守 考 试 纪 律注 意 行 为 规 范三、计算题(20分)如图所示,已知F ,a ,M=Fa ,各杆不计自重。
求:支座A 、D 处的约束力。
遵 守考 试 纪 律注 意 行 为 规 范四、计算题(20分)如图所示机构中,曲柄OA 长r ,以匀角速度ω0绕O轴转动,带动连杆AC 在套筒B 内滑动,套筒及与其固连的杆BD 可绕B 铰转动,BD 长l ,且垂直于AC 。
求在∠A OB = 90°,∠AB O = 30° 时,杆BD 上D 点的速度和加速度。
遵守 考 试 纪 律注 意 行 为 规 范五、计算题(20分)如图所示,在倾角为α的斜面上,有重为P 的小车与绳索相连,绳索绕定滑轮A 、动滑轮B 后与固定点C 相连。
大作业:如下图所示,两端简支梁(自己也可设定其他支承形式,如悬臂梁等),梁的截面尺寸及材料属性如下。
横截面积A = 1.006 x 10-2 m2截面惯性矩I = 1.774 x 10-4 m 4梁的高度 h = 0.3063 m 弹性模量E = 207x109 Nm -2密度 ρ= 7860 kg/m 3 泊松比可设定为0.25,响应计算时阻尼自己设定(小于0.05即可),要求完成如下分析计算: 1. 梁的固有频率理论值(1000Hz 以内)2. 利用有限元方法,分别用梁单元及板单元计算其固有频率及振型,同时分析不同单元数对计算结果的影响(如单元数为2、5、10、20、50、100等);3. 在有限元软件中利用模态叠加法进行响应计算(取前10阶模态):激振力为正弦形式,作用点与幅值自己设定,频率5-250Hz 范围内,步长5Hz 。
4. 计算至少3个频响函数。
撰写报告时要注意:报告要有理论说明,步骤要尽量详细。
计算结果用图表形式表示。
1 梁的固有频率理论值(1000Hz 以内)解:由参考文献可知,假设等截面简支梁长度为l ,抗弯刚度为EI ,密度为ρ,横截面积为A ,r表示第r 阶振型,则可以得到简支梁的自由振动的固有频率为:r w =由Matlab 计算梁的前十阶固有频率如下图所示:计算程序为:function NatFre = Natural_frequency_10 ( A , h , Rou , L , E , I ) clc; %其中,A=横截面积,h=梁高度,Rou=材料密度,L为梁长度clear; % E=材料的弹性模量,I=截面惯性矩NatFre = randn(1,10,'double');for r = 1 : 10NatFre[r] = r*r*pi*pi*sqrt( E*I /(A*h*Rou*L^3) );NatFre = NatFre / (2*pi) ;end2 利用有限元方法,分别用梁单元及板单元计算其固有频率及振型,同时分析不同单元数对计算结果的影响(如单元数为2、5、10、20、50、100等);(1)梁单元模型a 单元数为2 时的固有频率:SET TIME/FREQ LOAD STEP SUBSTEP CUMULATIVE1 12.840 1 1 12 56.601 1 2 23 141.47 1 3 34 143.93 1 4 45 255.98 1 5 5第1阶模态振型(单元数为2):第2阶模态振型(单元数为2):第3阶模态振型(单元数为2):第4阶模态振型(单元数为2):第5阶模态振型(单元数为2):b 单元数为5 时的固有频率:SET TIME/FREQ LOAD STEP SUBSTEP CUMULATIVE1 12.791 1 1 12 51.083 1 2 23 115.06 1 3 34 140.88 1 4 45 206.14 1 5 5第1阶模态振型(单元数为5):第2阶模态振型(单元数为5):第3阶模态振型(单元数为5):第5阶模态振型(单元数为5):c 单元数为10时的固有频率:SET TIME/FREQ LOAD STEP SUBSTEP CUMULATIVE1 12.789 1 1 12 51.004 1 2 23 114.22 1 3 34 140.45 1 4 45 201.85 1 5 5第2阶模态振型(单元数为10):第3阶模态振型(单元数为10):第5阶模态振型(单元数为10):d 单元数为20时的固有频率:SET TIME/FREQ LOAD STEP SUBSTEP CUMULATIVE1 12.789 1 1 12 50.999 1 2 23 114.16 1 3 34 140.34 1 4 45 201.54 1 5 5第2阶模态振型(单元数为20):第3阶模态振型(单元数为20):第5阶模态振型(单元数为20):e 单元数为50时的固有频率:SET TIME/FREQ LOAD STEP SUBSTEP CUMULATIVE1 12.789 1 1 12 50.999 1 2 23 114.16 1 3 34 140.31 1 4 45 201.51 1 5 5第2阶模态振型(单元数为50):第3阶模态振型(单元数为50):第5阶模态振型(单元数为50):f 单元数为100时的固有频率:SET TIME/FREQ LOAD STEP SUBSTEP CUMULATIVE1 12.789 1 1 12 50.999 1 2 23 114.16 1 3 34 140.31 1 4 45 201.51 1 5 5第2阶模态振型(单元数为100):第3阶模态振型(单元数为100):第5阶模态振型(单元数为100):由以上可以看出,当选定为梁单元时,选择的划分网格的单元数越多,所得到的固有频率与理论值越精确。
结构动力学大作业对于如下结构,是研究质量块的质量变化和在简支梁上位置的变化对整个系统模态的影响。
1以上为一个简支梁结构。
集中质量块放于梁上,质量块距简支梁的左端点距离为L.将该简支梁简化为欧拉伯努利梁,并离散为N 个单元。
每个单元有两个节点,四个自由度。
单元的节点位移可表示为:]1122,,,e v v δθθ⎡=⎣则单元内一点的挠度可计作:带入边界条件:1332210)(x a x a x a a x v +++=01)0(a v x v ===3322102)(L a L a L a a v L x v +++===110d d a x vx ===θ2321232d d L a L a a xv Lx ++===θ10v a =[]1234N N N N N =建立了单元位移模式后,其动能势能均可用节点位移表示。
单元的动能为:00111()222l l T T Tke e e e e y E dx qN Ndxq q mq t ρρ∂===∂⎰⎰ 其中m 为单元质量阵,并有:lT m N Ndx ρ=⎰带入公式后积分可得:2222156225413224133541315622420133224l l l l l l l m l l l l l l ρ-⎡⎤⎢⎥-⎢⎥=⎢⎥-⎢⎥---⎣⎦单元势能可表示为2220011()()222Tl lTT e pe e e e q y E EI dx EI N N dxq q Kq x ∂''''===∂⎰⎰ 其中K 为单元刚度矩阵,并有()lT K EI N N dx ''''=⎰2232212612664621261266264l l l l l l EI k l l l l l l l -⎡⎤⎢⎥-⎢⎥=⎢⎥---⎢⎥-⎣⎦以上为单元类型矩阵,通过定义全局位移矩阵,可以得到系统刚度矩阵和系统质量矩11θ=a )2(1)(3211222θθ+--=Lv v L a )(1)(22122133θθ++-=Lv v L a 1232133222231)(θ⎪⎪⎭⎫⎝⎛+-+⎪⎪⎭⎫ ⎝⎛+-=L x L x x v L x L x x v 22232332223θ⎪⎪⎭⎫ ⎝⎛-+⎪⎪⎭⎫ ⎝⎛-+L x L x v L x L x 24231211)()()()()(θθx N v x N x N v x N x v +++=阵。
当集中质量块加到简支梁上时,可以认为系统的刚度矩阵不变,而质量矩阵在 有基础上有所增加。
当集中质量块位于第i 个单元内,距单元左节点的位移为0x ,则其动能可表示为:000()()2T Te e m V N x N x δδ=则质量块附加到总体刚度矩阵的子矩阵尾为:000()()T m N x N x例如当质量为0m 的质量块位于单元的右节点上时,其质量阵可表示为00000000000100000m m ⎡⎤⎢⎥⎢⎥'=⎢⎥⎢⎥⎣⎦根据以上理论,编写matlab 程序。
(相关参数:密度7860KG/M3, 长度L=1m ,截面尺寸0.02m*0.02m )以下为matlab 源代码: 主程序clear; clc;Beam_InputData541; %输入相关参数,划分了40个单 %元k=zeros(No_nel*No_dof,No_nel*No_dof); %初始化单元刚度阵和质量阵 m=zeros(No_nel*No_dof,No_nel*No_dof); kk=zeros(Sys_dof,Sys_dof);mm=zeros(Sys_dof,Sys_dof); %初始化总体质量阵和刚度阵index=zeros(No_nel*No_dof,1); foriel=1:No_el nd(1)=iel; nd(2)=iel+1; leng=0.025;[k,m]=BeamElement11(prop,leng); %调用子函数形成单元刚度矩阵 %质量矩阵index=femEldof(nd,No_nel,No_dof);kk=femAssemble1(kk,k,index);mm=femAssemble1(mm,m,index); %调用子函数形成总体刚度矩阵 end %和质量矩阵Mzhiliangkuai=1/5*prop(3)*prop(6)*1; %将集中质量块加进总体质量矩Ms=zeros(82,82); %之中Ms(41,41)=Mzhiliangkuai; %此为质量块为于梁中央时的处mm=Ms+mm; 理方法kk(1,:)=[]; %引入边界条件,划去相应的kk(80,:)=[]; %行和列kk(:,1)=[];kk(:,80)=[];mm(1,:)=[];mm(80,:)=[];mm(:,1)=[];mm(:,80)=[];[V,D]=eig(kk,mm); %求解特征值和特征向量%或使用雅克比迭代求解特征值与特征向量,以下为代码%function[aa,v]=jac(a)%此程序用jacobi方法求实对称矩阵的全部特征值和特征向量%输入x:n x n矩阵%----------------------------------------------------%% n=length(a);% aa=zeros(1,n);% u=zeros(n,n);% l=0;% v是n阶单位矩阵% v=eye(n,n);% while (1)% l=l+1;% fm=0.0;% for i=1:n% for j=1:n% if i==j% continue;% else% d=abs(a(i,j));% if d>fm% fm=d;% p=i;% q=j;% end% end% end% end% if fm<0.0001% break;% end% x=2*a(p,q)*(sign(a(p,p)-a(q,q)));% y=abs(a(p,p)-a(q,q));% if y~=0% cn=sqrt((1+y/sqrt(x^2+y^2))/2.0);% else% cn=1/sqrt(2);% end% if y~=0% sn=x/sqrt(x^2+y^2)/(2*cn);% elseif y==0 & a(p,q)>0% sn=1/sqrt(2);% elseif y==0 & a(p,q)<0% sn=-1/sqrt(2);% end% %更新a% a_t=a;% for i=1:n% if i~=p & i~=q% a(i,p)=a_t(i,p)*cn+a_t(i,q)*sn;% a(i,q)=-a_t(i,p)*sn+a_t(i,q)*cn;% a(p,i)=a(i,p);% a(q,i)=a(i,q);% end% end% a(p,p)=a_t(p,p)*cn*cn+2*a_t(p,q)*cn*sn+a_t(q,q)*sn*sn; % a(q,q)=a_t(p,p)*sn*sn-2*a_t(p,q)*sn*cn+a_t(q,q)*cn*cn; % a(p,q)=0.0;% a(q,p)=a(p,q);% %更新v% v_t=v;% for i=1:n% v(i,p)=v_t(i,p)*cn+v_t(i,q)*sn;% v(i,q)=-v_t(i,p)*sn+v_t(i,q)*cn;% end% end% for i=1:n% aa(1,i)=a(i,i);% end%end%for i=1:10;% w(i,1)=sqrt(D(i,i))/(2*pi);%end%E=prop(1); Iz=prop(8); rho=prop(3)*prop(6); L=1;%i=(1:10)';%omega2=i.*i*pi^2*sqrt(E*Iz/(rho*L^4));%omega3=omega2/(2*pi);%for i=1:39;% x1(i)=i*0.025;% y1(i)=V(2*i,3);%end%plot(x1,y1);各子函数:Beam_InputData541No_el=40; number of elementsNo_nel=2; No_dof=2;No_node=(No_nel-1)*No_el+1;Sys_dof=No_node*No_dof;prop(1)=2.1e11; % elastic modulusprop(3)=7860; prop(4)=0.02;prop(5)=0.02; prop(6)=0.02*0.02;prop(7)=0.02*0.02^3/12; prop(8)=0.02*0.02^3/12;BeamElement11function [k,m]=BeamElement11(prop,leng);%,Opt_mass)E=prop(1);u=prop(2);rho=prop(3);A=prop(6); Iz=prop(8);G=E/(2*(1+u));c=E*Iz/(leng^3);k0=[12 6*leng -12 6*leng;6*leng 4*leng^2 -6*leng 2*leng^2;-12 -6*leng 12 -6*leng;6*leng 2*leng^2 -6*leng 4*leng^2];k=c*k0;mass=rho*A*leng;m0=[156 22*leng 54 -13*leng;22*leng 4*leng^2 13*leng -3*leng^2;54 13*leng 156 -22*leng;-13*leng -3*leng^2 -22*leng 4*leng^2];m=mass/420*m0;femAssemble1function [kk]=femAssemble1(kk,k,index)eldof = length(index);for i=1:eldofii=index(i);for j=1:eldofjj=index(j);kk(ii,jj)=kk(ii,jj)+k(i,j);endendfunction [index]=femEldof(nd,No_nel,No_dof)k=0;for i=1:No_nelstart = (nd(i)-1)*No_dof;for j=1:No_dofk=k+1;index(k)=start+j;endend首先我分析了无集中质量块时梁的模态特性,提取了前十阶固有频率和前四阶振型。
然后分析了当集中质量块分别为简支梁质量1/40,1/20.1/10,1/5,1/2,1 倍和2倍时这八种工况。