K* G(s)
s(s 2)( s 4)
① 实轴上的根轨迹:[-∞,-4], [-2,0]
② 渐近线: a (2 4) 3 2 a 60, 180
3
PPT课件
③ 分离点: 1 1 1 0 d d2 d4
整理得: 3d 2 12d 8 0
11
PPT课件
解.
K* G(s)
s(s 2)( s 4)
分离点: d1 0.845
d 0.845
K
* d
dd2d Nhomakorabea
4
3.08
虚轴交点 8 2.828
K
*
48
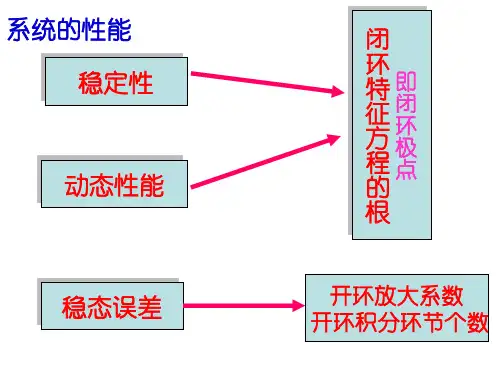
(1)复极点对应 0.5 时的 K 值及闭环极点位置
如本系统,可降阶为二阶系统的高阶系统,在已知复根的阻尼系数的前提下, 求三根的方法
设 l1,2 n j 1 2n
由根之和 C 0 2 4 6 2 n l3
0.5
l3 6 2 n 6 n
12
PPT课件
应有: D(s) s(s 2)(s 4) K * s3 6s2 8s K *
8 2.828
K
*
48
使系统稳定且为欠阻尼状态时开环增益 K 的取值范围
依题,对应 有:
3.08 K * 48
3.08 K K * 48 6
8
8 84
PPT课件
动态性能分析
应用根轨迹法,可以迅速确定在某一开环增益下的闭环极 点的位置,再补上闭环零点,从而得到相应的闭环传递函数。 利用拉斯变换确定系统的单位阶跃响应,再由阶跃响应求 得系统的各项性能指标。