自动控制系统的校正
- 格式:doc
- 大小:962.00 KB
- 文档页数:13
自动控制系统校正方法介绍自动控制系统是指能够根据一定的规律或目标来自动调节和控制系统参数的一种系统。
在实际的应用中,自动控制系统往往会存在一定的误差或不稳定性,因此需要进行校正以提高系统的性能和稳定性。
下面将介绍几种常见的自动控制系统校正方法。
一、比例积分微分(PID)控制方法比例积分微分控制方法是一种基于系统误差的反馈控制方法。
该方法通过调节比例、积分和微分三个功能的权重来调节系统的动态响应和稳态误差。
具体来说,比例控制使得系统能够快速响应,积分控制消除系统的稳态误差,微分控制提高系统的稳定性。
通过合理的选择PID控制器的参数,可以有效地校正自动控制系统。
二、最小二乘法方法最小二乘法是一种通过最小化残差平方和来估计参数的数学方法。
在自动控制系统中,最小二乘法可以用于识别系统的模型参数。
通过采集系统的输入输出数据,然后利用最小二乘法进行拟合,可以得到最佳的模型参数。
这些参数可以用于校正系统,以提高控制系统的性能。
三、系统辨识方法系统辨识是通过选择合适的模型结构和估计参数来描述实际系统的过程。
系统辨识方法可以通过对系统的输入输出数据进行统计分析来估计系统的动态特性。
常见的系统辨识方法包括传递函数法、状态空间法、神经网络法等。
通过对系统进行辨识,可以得到系统的数学模型,并根据模型对系统进行校正。
四、自适应控制方法自适应控制是指根据系统的动态特性和状态变化来调整自动控制系统的控制参数。
自适应控制方法可以通过观察系统的输出和状态变量,来调整控制器的参数,以保持系统的稳定性和性能。
常见的自适应控制方法包括模型参考自适应控制、模型预测控制等。
通过自适应控制方法,可以实时地校正控制系统,并适应系统的动态变化。
总结来说,自动控制系统校正方法包括比例积分微分控制方法、最小二乘法方法、系统辨识方法和自适应控制方法等。
这些方法可以根据系统的需要选择合适的方式来进行校正,以提高自动控制系统的性能和稳定性。
在实际应用中,校正方法的选择应综合考虑系统的特性、校正精度和实施难度等因素。
自动控制系统的校正第一节校正的基本概念一、校正的概念当控制系统的稳态、静态性能不能满足实际工程中所要求的性能指标时,首先可以考虑调整系统中可以调整的参数;若通过调整参数仍无法满足要求时,则可以在原有系统中增添一些装置和元件,人为改变系统的结构和性能,使之满足要求的性能指标,我们把这种方法称为校正。
增添的装置和元件称为校正装置和校正元件。
系统中除校正装置以外的部分,组成了系统的不可变部分,我们称为固有部分。
二、校正的方式根据校正装置在系统中的不同位置,一般可分为串联校正、反馈校正和顺馈补偿校正。
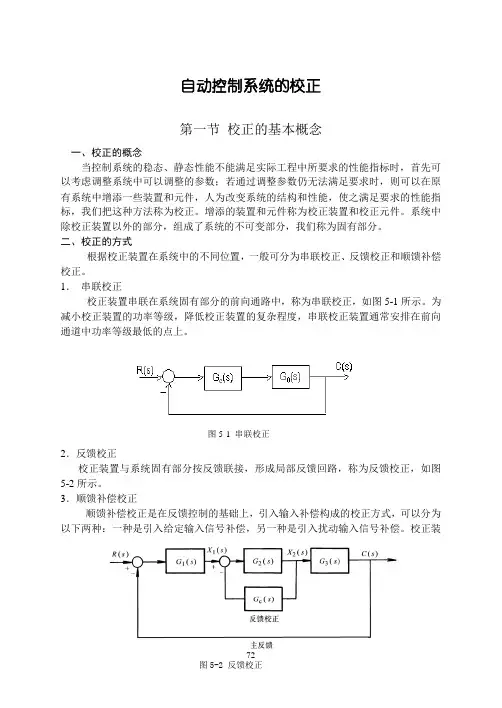
1.串联校正校正装置串联在系统固有部分的前向通路中,称为串联校正,如图5-1所示。
为减小校正装置的功率等级,降低校正装置的复杂程度,串联校正装置通常安排在前向通道中功率等级最低的点上。
图5-1 串联校正2.反馈校正校正装置与系统固有部分按反馈联接,形成局部反馈回路,称为反馈校正,如图5-2所示。
3.顺馈补偿校正顺馈补偿校正是在反馈控制的基础上,引入输入补偿构成的校正方式,可以分为以下两种:一种是引入给定输入信号补偿,另一种是引入扰动输入信号补偿。
校正装置将直接或间接测出给定输入信号R(s)和扰动输入信号D(s),经过适当变换以后,作为附加校正信号输入系统,使可测扰动对系统的影响得到补偿。
从而控制和抵消扰动对输出的影响,提高系统的控制精度。
三、校正装置根据校正装置本身是否有电源,可分为无源校正装置和有源校正装置。
1.无源校正装置无源校正装置通常是由电阻和电容组成的二端口网络,图5-3是几种典型的无源校正装置。
根据它们对频率特性的影响,又分为相位滞后校正、相位超前校正和相位滞后—相位超前校正。
无源校正装置线路简单、组合方便、无需外供电源,但本身没有增益,只有衰减;且输入阻抗低,输出阻抗高,因此在应用时要增设放大器或隔离放大器。
2.有源校正装置有源校正装置是由运算放大器组成的调节器。
图5-4是几种典型的有源校正装置。



自动控制原理第六章控制系统的校正控制系统的校正是为了保证系统的输出能够准确地跟随参考信号变化而进行的。
它是控制系统运行稳定、可靠的基础,也是实现系统优化性能的重要步骤。
本章主要讨论控制系统的校正方法和常见的校正技术。
一、校正方法1.引导校正:引导校正是通过给系统输入一系列特定的信号,观察系统的输出响应,从而确定系统的参数。
最常用的引导校正方法是阶跃响应法和频率扫描法。
阶跃响应法:即给系统输入一个阶跃信号,观察系统输出的响应曲线。
通过观察输出曲线的形状和响应时间,可以确定系统的参数,如增益、时间常数等。
频率扫描法:即给系统输入一个频率不断变化的信号,观察系统的频率响应曲线。
通过观察响应曲线的峰值、带宽等参数,可以确定系统的参数,如增益、阻尼比等。
2.通用校正:通用校正是利用已知的校准装置,通过对系统进行全面的测试和调整,使系统能够输出符合要求的信号。
通用校正的步骤通常包括系统的全面测试、参数的调整和校准装置的校准。
二、校正技术1.PID控制器的校正PID控制器是最常用的控制器之一,它由比例、积分和微分三个部分组成。
PID控制器的校正主要包括参数的选择和调整。
参数选择:比例参数决定控制系统的响应速度和稳定性,积分参数决定系统对稳态误差的响应能力,微分参数决定系统对突变干扰的响应能力。
选择合适的参数可以使系统具有较好的稳定性和性能。
参数调整:通过参数调整,可以进一步改善系统的性能。
常见的参数调整方法有经验法、试错法和优化算法等。
2.校正装置的使用校正装置是进行控制系统校正的重要工具,常见的校正装置有标准电压源、标准电阻箱、标准电流源等。
标准电压源:用于产生已知精度的参考电压,可以用来校正控制系统的电压测量装置。
标准电阻箱:用于产生已知精度的电阻,可以用来校正控制系统的电流测量装置。
标准电流源:用于产生已知精度的电流,可以用来校正控制系统的电流测量装置。
校正装置的使用可以提高系统的测量精度和控制精度,保证系统的稳定性和可靠性。
自动控制系统校正方法
下面将介绍几种常见的自动控制系统校正方法:
1.基于试探法的校正方法:
这种方法通过对控制系统进行试探性的扰动,观察系统的响应来确定
调整参数的大小和方向。
常见的方法有阶跃响应法和斜坡响应法。
阶跃响
应法通过输入一个阶跃信号,观察系统的输出响应,调整参数使输出尽快
收敛到期望值。
斜坡响应法则是通过输入一个斜坡信号,观察系统的输出
响应的斜率,根据斜率的大小和方向调整参数。
2.基于频域分析的校正方法:
这种方法使用频域分析工具来分析系统的幅频特性,从而得到系统的
频率响应函数,进而调整参数使得系统的频率响应函数与期望值尽量接近。
其中最常见的方法是根轨迹法和频率响应曲线法。
根轨迹法通过画出系统
的根轨迹图来分析系统的稳定性和性能,进而调整参数。
频率响应曲线法
通过绘制系统的幅频特性曲线,观察曲线的形状、幅值和相位信息,从而
调整参数。
3.基于模型预测的校正方法:
这种方法通过建立系统的数学模型来进行系统的校正。
常见的方法有
最小二乘法和极大似然法。
最小二乘法通过最小化实际输出与期望输出之
间的平方误差来调整参数。
极大似然法则是通过最大化实际输出的似然函
数来调整参数,从而使系统的输出尽可能接近期望输出。
需要注意的是,不同的自动控制系统校正方法适用于不同的系统和控
制目标。
在进行校正时,需要根据实际情况选择合适的方法,并根据实际
测试结果进行调整和优化。
此外,校正过程中还需考虑系统的非线性特性、外界干扰和噪声等因素的影响,以实现系统的更好性能。
自动控制系统中的校正与校准自动控制系统是现代工业领域中广泛应用的技术之一。
它通过传感器感知环境信息、经过算法处理后输出控制信号,以实现对系统的自动监控和调节。
而在自动控制系统的运行过程中,校正与校准是确保系统准确性和性能稳定的重要环节。
一、校正的作用与方法校正是指通过调整系统的参数,使其输出与实际值相符合的过程。
校正的主要目的是提高系统的准确性和稳定性,确保系统能够按照预定要求进行工作。
在自动控制系统中,常见的校正方法包括以下几种:1.1 传感器校正传感器是自动控制系统中获取环境信息的重要组成部分。
传感器的准确性直接影响系统的工作效果。
因此,在系统安装和维护过程中,需要对传感器进行校正。
常见的传感器校正方法包括零点校正和量程校准等。
1.2 控制算法校正在自动控制系统中,控制算法是决定系统行为的核心。
控制算法的准确性和稳定性对系统的工作至关重要。
因此,需要对控制算法进行校正,使得系统的控制动作更加精确。
常见的控制算法校正方法包括闭环校正和开环校正等。
1.3 系统整体校正自动控制系统是一个复杂的系统,包括传感器、执行器、控制器等多个组件。
为了确保整个系统的准确性和稳定性,需要对系统进行整体校正。
常见的系统整体校正方法包括模型辨识和自适应控制等。
二、校准的作用与方法校准是指通过对比系统输出值与标准值之间的差异,对系统进行调整和校正的过程。
校准的目的是确保系统的输出值能够与实际值相匹配。
在自动控制系统中,常见的校准方法包括以下几种:2.1 标定校准标定校准是指将系统输出值与已知标准值进行比较,并进行相应的调整,使系统输出值更接近标准值。
在自动控制系统中,常见的标定校准方法有零点标定和斜率标定等。
2.2 软件校准在一些特殊情况下,系统的输出值可能会受到软件算法或逻辑的影响。
为了确保系统的准确性,需要对软件进行校准。
常见的软件校准方法包括修正系数法和卡尔曼滤波器等。
2.3 执行器校准执行器是自动控制系统中负责执行控制动作的组件,执行器的准确性和稳定性对系统的控制效果具有重要影响。
第五章自动控制系统的校正本章要点在系统性能分析的基础上,主要介绍系统校正的作用和方法,分析串联校正、反馈校正和复合校正对系统动、静态性能的影响。
第一节校正的基本概念一、校正的概念当控制系统的稳态、静态性能不能满足实际工程中所要求的性能指标时,首先可以考虑调整系统中可以调整的参数;若通过调整参数仍无法满足要求时,则可以在原有系统中增添一些装置和元件,人为改变系统的结构和性能,使之满足要求的性能指标,我们把这种方法称为校正。
增添的装置和元件称为校正装置和校正元件。
系统中除校正装置以外的部分,组成了系统的不可变部分,我们称为固有部分。
二、校正的方式根据校正装置在系统中的不同位置,一般可分为串联校正、反馈校正和顺馈补偿校正。
1.串联校正校正装置串联在系统固有部分的前向通路中,称为串联校正,如图5-1所示。
为减小校正装置的功率等级,降低校正装置的复杂程度,串联校正装置通常安排在前向通道中功率等级最低的点上。
图5-1 串联校正2.反馈校正校正装置与系统固有部分按反馈联接,形成局部反馈回路,称为反馈校正,如图5-2所示。
3.顺馈补偿校正顺馈补偿校正是在反馈控制的基础上,引入输入补偿构成的校正方式,可以分为以下两种:一种是引入给定输入信号补偿,另一种是引入扰动输入信号补偿。
校正装图5-2 反馈校正置将直接或间接测出给定输入信号R(s)和扰动输入信号D(s),经过适当变换以后,作为附加校正信号输入系统,使可测扰动对系统的影响得到补偿。
从而控制和抵消扰动对输出的影响,提高系统的控制精度。
三、校正装置根据校正装置本身是否有电源,可分为无源校正装置和有源校正装置。
1.无源校正装置无源校正装置通常是由电阻和电容组成的二端口网络,图5-3是几种典型的无源校正装置。
根据它们对频率特性的影响,又分为相位滞后校正、相位超前校正和相位滞后—相位超前校正。
无源校正装置线路简单、组合方便、无需外供电源,但本身没有增益,只有衰减;且输入阻抗低,输出阻抗高,因此在应用时要增设放大器或隔离放大器。
a)相位滞后b)相位超前c)相位滞后-超前图5-3 无源校正装置2.有源校正装置有源校正装置是由运算放大器组成的调节器。
图5-4是几种典型的有源校正装置。
有源校正装置本身有增益,且输入阻抗高,输出阻抗低,所以目前较多采用有源校正装置。
缺点是需另供电源。
第二节串联校正一、三频段对系统性能的影响1.低频段的代表参数是斜率和高度,它们反映系统的型别和增益。
表明了系统的稳态精度。
2.中频段是指穿越频率附近的一段区域。
代表参数是斜率、宽度(中频宽)、幅值穿越频率和相位裕量,它们反映系统的最大超调量和调整时间。
表明了系统的相对稳定性和快速性。
3.高频段的代表参数是斜率,反映系统对高频干扰信号的衰减能力。
二、串联校正方法1. 比例微分校正(相位超前校正)图5-5为一比例微分校正装置,也称为PD 调节器,其传递函数为G(s)=-K(Ts+1)式中 K=R 1/R 0 ——比例放大倍数T=R 0C 0——微分时间常数其Bode 图如图5-6所示。
从图可见,PD 调节器提供了超前相位角,所以PD 校正也称为超前校正。
并且PD 调节器的对数渐近幅频特性的斜率图5-4 有源校正装置图5-5 PD 调节器为+20dB/dec 。
因而将它的频率特性和系统固有部分的频率特性相加,比例微分校正的作用主要体现在两方面:(1)使系统的中、高频段特性上移(PD 调节器的对数渐近幅频特性的斜率为+20dB/dec ),幅值穿越频率增大,使系统的快速性提高。
(2)PD 调节器提供一个正的相位角,使相位裕量增大,改善了系统的相对稳定性。
但是,由于高频段上升,降低了系统的抗干扰能力。
例5-1设图5-7所示系统的开环传递函数为 )1)(1()(21++=s T s T s K s G 其中T 1=0.2,T 2=0.01,K=35,采用PD 调节器(K=1 ,T=0.2s ),对系统作串联校正。
试比较系统校正前后的性能。
解:原系统的Bode 图如图5-8中曲线I 所示。
特性曲线以-40dB/dec 的斜率穿越0dB 线,穿越频率ωc =13.5dB ,相位裕量γ=12.3o 。
采用PD 调节器校正,其传递函数G c (s)=0.2s+1,Bode 图为图5-8中的曲线II 。
校正后的曲线如图5-8中的曲线III 。
由图可见,增加比例积分校正装置后:(1) 低频段,L(ω)的斜率和高度均没变,所以不影响系统的稳态精度。
(2) 中频段,L(ω)的斜率由校正前的-40dB/dec 变为校正后的-20dB/dec ,相位裕量由原来的13.5o 提高为70.7 o ,提高了系统的相对稳定性;穿越频率ωc 由13.2变为35,快速性提高。
图5-6 PD 调节器的Bode 图图5-7 具有PD 校正的控制系统(3) 高频段,L(ω)的斜率由校正前的-60dB/dec 变为校正后的-40dB/dec ,系统的抗高频干扰能力下降。
综上所述,比例微分校正将使系统的稳定性和快速性改善,但是抗高频干扰能力下降。
2.比例积分校正(相位滞后校正)图5-9为一比例积分校正装置,也称为PI 调节器,其传递函数为 s T s T K s G C C C C )1()(+= 式中 K C =R 1/R 0 ——比例放大倍数T 1=R 1C 1——积分时间常数其Bode 图如图5-10所示。
从图可见,PI调节器提供了负的相位角,所以PD 校正也称为滞后校正。
并且PI 调节器的对数渐近幅频特性在低频段的斜率为-20dB/dec 。
因而将它的频率特性和系统固有部分的频率特性相加,可以提高系统的型别,即提高系统的稳态精度。
图5-8 PD 校正对系统性能的影响图5-9 PI 调节器从相频特性中可以看出,PI 调节器在低频产生较大的相位滞后,所以PI 调节器串入系统时,要注意将PI 调节器转折频率放在固有系统转折频率的左边,并且要远一些,这样对系统的稳定性的影响较小。
但是,由于高频段上升,降低了系统的抗干扰能力。
例5-2设图5-11所示系统的固有开环传递函数为 )1)(1()(211++=s T s T K s G 其中T 1=0.33,T 2=0.036,K 1=3.2。
采用PI 调节器(K=1.3 ,T=0.33s ),对系统作串联校正。
试比较系统校正前后的性能。
解:原系统的Bode 图如图5-12中曲线I 所示。
特性曲线低频段的斜率为0dB ,显然是有差系统。
穿越频率ωc =9.5dB ,相位裕量γ=88o 。
图5-10 PI 调节器的Bode 图图5-11 具有PI 校正的控制系统采用PI 调节器校正,其传递函数s s s G C 33.0)133.0(3.1)(+=,Bode 图为图5-12中的曲线II 。
校正后的曲线如图5-12中的曲线III 。
由图可见,增加比例积分校正装置后:(1) 在低频段,L(ω)的斜率由校正前的0dB/dec 变为校正后的-20dB/dec ,系统由0型变为I 型,系统的稳态精度提高。
(2) 在中频段,L(ω)的斜率不变,但由于PI 调节器提供了负的相位角,相位裕量由原来的88o 减小为65 o ,降低了系统的相对稳定性;穿越频率ωc 有所增大,快速性略有提高。
(3) 在高频段,L(ω)的斜率不变,对系统的抗高频干扰能力影响不大。
综上所述,比例积分校正虽然对系统的动态性能有一定的副作用,使系统的相对稳定性变差,但它却能将使系统的稳态误差大大减小,显著改善系统的稳态性能。
而稳态性能是系统在运行中长期起着作用的性能指标,往往是首先要求保证的。
因此,在许多场合,宁愿牺牲一点动态性能指标的要求,而首先保证系统的稳态精度,这就是比例积分校正获得广泛应用的原因。
第三节 反馈校正图5-12 PI 校正对系统性能的影响在主反馈环内,为改善系统性能而加入的反馈称为局部反馈。
反馈校正除了具有串联校正同样的校正效果外,还具有串联校正所不可替代的效果。
一、反馈校正的方式通常反馈校正可分为硬反馈和软反馈。
硬反馈校正装置的主体是比例环节(可能还含有小惯性环节),G c (s)= α(常数),它在系统的动态和稳态过程中都起反馈校正作用;软反馈校正装置的主体是微分环节(可能还含有小惯性环节),G c (s)= αs ,它只在系统的动态过程中起反馈校正作用,而在稳态时,反馈校正支路如同断路,不起作用。
二、反馈校正的作用在图5-13中,设固有系统被包围环节的传递函数为G 2(s) ,反馈校正环节的传递函数为G C (s) ,则校正后系统被包围部分传递函数变为)()(1)(2212s G s G s G X X C += 1.可以改变系统被包围环节的结构和参数,使系统的性能达到所要求的指标。
(1)对系统的比例环节G 2(s)=K 进行局部反馈① 当采用硬反馈,即G C (s)= α时,校正后的传递函数为KK s G α+=1)( ,增益降低为KK α+1倍,对于那些因为增益过大而影响系统性能的环节,采用硬反馈是一种有效的方法。
② 当采用软反馈,即G C (s)= αs 时,校正后的传递函数为Ks Ks G α+=1)( ,比例图5-13 反馈校正在系统中的作用环节变为惯性环节,惯性环节时间常数变为αK ,动态过程变得平缓。
对于希望过度过程平缓的系统,经常采用软反馈。
(2) 对系统的积分环节G 2(s)=K/s 进行局部反馈① 当采用硬反馈,即G C (s)= α时,校正后的传递函数为11/1)(+=+=s KK s K s G ααα 含有积分环节的单元,被硬反馈包围后,积分环节变为惯性环节,惯性环节时间常数变为1/(αK ),增益变为1/α。
有利于系统的稳定,但稳态性能变差。
② 当采用软反馈,即G C (s)= αs 时,校正后的传递函数为sK k K s K s G )1(1/)(+=+=αα ,仍为积分环节,增益降为1/(1+αK )倍。
(3)对系统的惯性环节1)(+=Ts K s G 进行局部反馈 ① 当采用硬反馈,即G C (s)= α时,校正后的传递函数为11)1/(1)(+++=++=s KT K K K Ts K s G ααα 惯性环节时间常数和增益均降为1/(1+αK ),可以提高系统的稳定性和快速性。
② 当采用软反馈,即G C (s)= αs 时,校正后的传递函数为1)()(++=s K T K s G α ,仍为惯性环节,时间常数增加为(T+αK )倍。
2. 可以消除系统固有部分中不希望有的特性,从而可以削弱被包围环节对系统性能的不利影响。
当G 2(s)G C (s)》1时,)(1)()(1)(2212s G s G s G s G X X C C ≈+= 所以被包围环节的特性主要由校正环节决定,但此时对反馈环节的要求较高。