块状物品推送机机械原理课程设计
- 格式:doc
- 大小:281.50 KB
- 文档页数:19
机械原理课程设计说明书设计题目:_______ 包装机械_______系:_______________ 机械_________专业:_____班级:___________________________设计者:________________________指导老师:_______________________2015年7月2日目录一、 ................................................ 课程设计目的1二、 ................................................ 课程设计意义2三、 ................................................ 课程设计任务2四、 ........................................ 课程设计的内容及要求3五、 ............................................ 课程设计进度安排3六、 ...................................... 课程设计地点及时间安排3七、 .............................................. 答辩与评分标准3八、 .................................................... 准备工作4九、 ............................................ 机械结构方案设计4十、尺寸设计与计算 (7)十一、运动曲线 (8)十二、运动循环图 (11)十三、结果讨论 (12)十四、课程设计总结 (12)十五、参考书目 (13)十六、教师评价 (14)附录15《机械原理与设计I 》课程设计任务书专业班级: _____ 学号: _______ 姓名: _________ 指导教师: _____一、课程设计目的(1) 通过课程设计,学会将理论知识运用于实际问题,并对以已学知识较 全面的进行一次加深、巩固和整理。
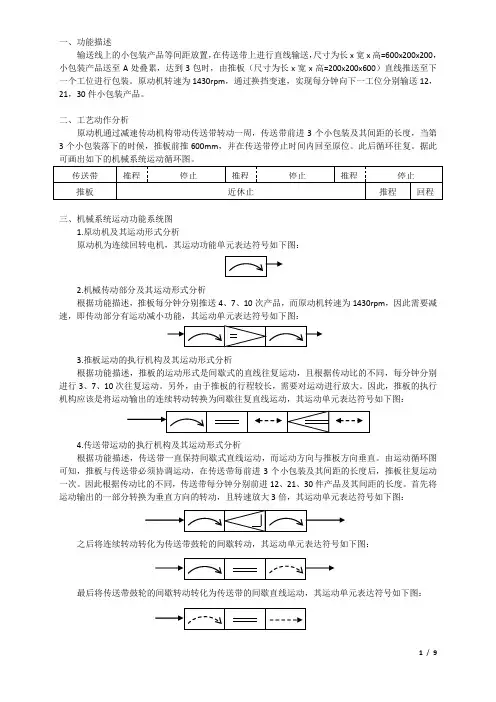
一、功能描述输送线上的小包装产品等间距放置,在传送带上进行直线输送,尺寸为长x宽x高=600x200x200,小包装产品送至A处叠累,达到3包时,由推板(尺寸为长x宽x高=200x200x600)直线推送至下一个工位进行包装。
原动机转速为1430rpm,通过换挡变速,实现每分钟向下一工位分别输送12,21,30件小包装产品。
二、工艺动作分析原动机通过减速传动机构带动传送带转动一周,传送带前进3个小包装及其间距的长度,当第3个小包装落下的时候,推板前推600mm,并在传送带停止时间内回至原位。
此后循环往复。
据此可画出如下的机械系统运动循环图。
三、机械系统运动功能系统图1.原动机及其运动形式分析原动机为连续回转电机,其运动功能单元表达符号如下图:2.机械传动部分及其运动形式分析根据功能描述,推板每分钟分别推送4、7、10次产品,而原动机转速为1430rpm,因此需要减速,即传动部分有运动减小功能,其运动单元表达符号如下图:3.推板运动的执行机构及其运动形式分析根据功能描述,推板的运动形式是间歇式的直线往复运动,且根据传动比的不同,每分钟分别进行3、7、10次往复运动。
另外,由于推板的行程较长,需要对运动进行放大。
因此,推板的执行机构应该是将运动输出的连续转动转换为间歇往复直线运动,其运动单元表达符号如下图:4.传送带运动的执行机构及其运动形式分析根据功能描述,传送带一直保持间歇式直线运动,而运动方向与推板方向垂直。
由运动循环图可知,推板与传送带必须协调运动,在传送带每前进3个小包装及其间距的长度后,推板往复运动一次。
因此根据传动比的不同,传送带每分钟分别前进12、21、30件产品及其间距的长度。
首先将运动输出的一部分转换为垂直方向的转动,且转速放大3倍,其运动单元表达符号如下图:之后将连续转动转化为传送带鼓轮的间歇转动,其运动单元表达符号如下图:最后将传送带鼓轮的间歇转动转化为传送带的间歇直线运动,其运动单元表达符号如下图:根据上述分析的产品生产线由原动机到执行机构的运动传递与转换的逻辑关系,可以绘制出其运动功能系统图如下:四、机械系统运动方案拟定1.产品生产线所使用的原动机为三相交流电机,其额定转速为1430rpm 。
机械课程设计说明书题目:块状物品推送机的机械结构作者:学号:班级:系别:机电及自动化工程系专业:机械设计制造及其自动化===年=月目录1.设计题目及要求 (2)1.1设计题目 (2)1.2设计数据与要求 (2)1.3设计任务 (2)2.执行机构设计方案选择 (3)2.1实现推送机推送要求的执行机构设计方案 (3)2.2设计方案选定 (5)3.凸轮基本参数的计算及UG建模 (5)3.1凸轮轮廓曲线计算公式 (5)3.2凸轮最大压力角及尺寸的确定 (5)3.3在UG中建立凸轮轮廓曲线 (7)3.3.1 从动件位移分析 (7)3.3.2 UG表达式的推导 (8)3.4 基于UG的凸轮造型设计 (8)4.V带传动装置及参数计算 (10)4.1 减速系统设计 (11)4.2 V带参数计算 (11)5.传动零件设计计算及校核 (12)5.1齿轮的设计计算 (12)5.2齿轮的强度设计与校核 (14)5.3轴的选材 (14)5.4轴的设计及校核 (14)6.电机的选择及总传动比的分配 (19)6.1电机的选择 (19)6.2传动比计算 (19)7.实体建模图及运动简图 (20)总结 (21)参考文献 (22)一. 设计题目及要求1.1 设计题目在自动包裹机的包装作业过程中,经常需要将物品从前一工序转送到下一工序。
现要求设计一用于糖果、香皂等包裹机中的物品推送机,将块状物品从一位置向上推送到所需的另一位置,如图所示。
1.2设计数据与要求1. 向上推送距离H=120mm ,生产率为每分钟推送物品120件;2. 推送机的原动机为同步转速为3000r /min 的三相交流电动机,通过减速装置带动执行机构主动件等速转动;3. 由物品处于最低位置时开始,当执行机构主动件转过1500时,推杆从最低位置运动到最高位置;当主动件再转过1200时,推杆从最高位置又回到最低位置;最后当主动件再转过900时,推杆在最低位置停留不动;4. 设推杆在上升运动过程中,推杆所受的物品重力和摩擦力为常数,其值为500N ;设推杆在下降运动过程中,推杆所受的摩擦力为常数,其值为100N ;5. 使用寿命10年,每年300工作日,每日工作16小时;6. 在满足行程的条件下,要求推送机的效率高(推程最大压力角小于350),结构紧凑,振动噪声小。

《机械原理》课程设计计算说明书学院专业班设计者:完成日期:年月日xx大学计算结果计算过程及计算说明目录1.课程设计题目1.1、课程设计题目1.2、工艺动作分解1.3、设计要求2.课程设计题目分析2.1、总功能要求2.2、总功能分解2.3、书本打包机设计参数的选择2.4、各部分执行机构的设计2.5、书本打包机整体机构简图2.6、整个机构的运动循环图3.各部分机构的设计方案说明4.执行机构的设计和传动比的计算4.1、电动机到主轴间的减速机构计算4.2、推书机构的连杆机构计算4.3、推书机构中的槽轮机构分析4.4、凸轮机构的计算5.课程设计心得体会6.参考资料1课程设计题目1.1课程设计题目课程设计题目:自动压片成形机书本打包机主要是用在印刷厂里,在大量的书本印刷出来后,将其以一定的数量为一堆,用牛皮纸将其包装起来,以便于销售和运输。
这种功能在很多地方都可以用到,比如:包糖机,饭盒包装机等凡是涉及到要将东西分堆包装的地方,都可以将其稍微改动即可用于其它地方。
1.2工艺动作分解书本打包机的用途是要把一摞书(如20 本一包)用牛皮纸包成一包,并在两端贴好封签(图 1-1)。
包、封的工艺顺序如图 1-2 所示。
图1-1图1-2其工艺过程如下所述:①横向送书(送一摞书)。
②纵向推书前进(推一摞书)到工位 a,使它与工位 b ~ g上的 6 摞书贴紧。
③书推到工位 a前,包装纸已先送到位。
包装纸原为整卷筒纸,由上向下送够长度后进行裁切。
④继续推书前进一摞书的位置到工位 b,由于在工位 b 的书摞上下方设置有挡板,以挡住书摞上下方的包装纸,所以书摞推到 b 时实现包三面,这个工序中推书机构共推动 a ~ g的 7 摞书。
⑤推书机构回程时,折纸机构动作,先折侧边(将纸卷包成筒状),再折两端上、下边。
⑥继续折前角。
⑦上步动作完成后,推书机构已进到下一循环的工序④,此时将工位 b 上的书推到工位 c。
在此过程中,利用工位 c两端设置的挡板实现折后角。
引言 (2)关键字:机构运动分析机构结构设计曲柄滑块 (2)一、设计题目:包装机推包机构运动方案设计 (3)1、设计题目 (3)2、设计数据与要求 (3)3、设计任务 (3)二、执行机构运动方案设计 (3)方案一 (3)方案二 (5)方案三 (6)三、传动方案的选择 (7)电机的的选择 (7)执行构件运动分析 (9)凸轮设计 (13)四、心得体会 (16)引言机械原理课程设计是使学生较全面、系统巩固和加深机械原理课程的基本原理方法的重要实践环节,通过此次设计,学生可以学习机构运动方案的确定,培养分析向设计机械能力,以及开发创新的能力。
以机械系统方案设计与拟定为结合点,进一步巩固和另深学生所学的理论知识。
明确课程设计目的、步骤,根据自己的设计题目对设计内容进行分析,确定输入,输出件运动型式(即功能原理分析)。
包装机推包机是一种包装机中不可缺少的一部分,它推送物品到达指定包装工作台,该机构取代了传统的人工移动物品,工作效率底的缺点,我所设计的推包机构推包,回程一体的全自动化功能其主要设计思路来自于对传统工艺分解然后按照相应功能的机构部件进行设计对比选定以及优化组合,综合利用凸轮的往复运动齿轮的传动运动,以及减速器的定植调速比的设定,利用A u t o C a d、m a t l a b等软件强大绘图功能和的编辑功能,把设计做得更加精准,更加可靠。
.关键字:机构运动分析机构结构设计曲柄滑块一、设计题目:包装机推包机构运动方案设计1、设计题目现需设计某一包装机的推包机构,要求待包装的工件1(见附图33)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a 处推至b 处(包装工作台),再进行包装。
为了提高生产率,希望在推头2结束回程(由b 至a )时,下一个工件已送到推头2的前方。
这样推头2就可以马上再开始推送工件。
这就要求推头2在回程时先退出包装工作台,然后再低头,即从台面的下面回程。
因而就要求推头 2 按图示的abcdea 线路运动。
目录第一章1-1:摘要 (3)1-2:前言 (3)第二章2-1:设计题目 (4)2-2:运动方案的拟定与比较 (4)2-3:机械运动简图................ (6)2-4:机构结构分析....... ....... ....... ....... ....... (7)2-5: 机构运动分析........................................ (8)第三章3-1:参考文献 (10)3-2:致谢 (10)3-3:附录附录(一):程序框图 (11)附录(二):VB程序代码 (11)附录(三):曲线图及程序运行截图 (19)第一章1-1:摘要中文摘要:本文通过拟定机械运动方案、按照机械的几何、运动、动力、轨迹等性能要求进行低副运动机构、运动尺寸的设计,所选择的机构是曲柄滑块机构,并对起进行运动分析和动态静力分析及利用计算机(VB)完成机械运动方案和机构运动简图的绘制。
通过课程设计进一步巩固和加深机械原理课程的理论知识;培养解决实际工程问题的能力,掌握机械运动、动力分析和设计的基本方法,进一步提高学生的工程设计能力。
英文摘要:This paper is the crank organization of slide block through decide mechanical sport scheme and, according to the performances such as locus, sport, power and the geometry of machinery, asking the organization that lows associate sport organization and the design of sport size and selects , completes mechanical sport scheme for rising to carry out sport analysis and development quietly force analysis and using computer ( VB ) with organization kinematic diagram draw. Through course design, strengthen and deepen the theoretical knowledge of mechanical principle course further; Train the basic method that solves the ability of actual project problem and makes student grasp mechanical sport, power analysis and design , raise the project design ability of student further.1-2:前言机械原理是一门以机器和机构为研究对象的学科.机械原理课程设计是使学生较全面的、系统巩固和加深机械原理课程的基本原理和方法的重要环节,是培养学生“初步具有确定机械运动方案,分析和设计机械的能力”及“开发创新能力”的一种手段。
机械原理课程设计搬运机一、课程目标知识目标:1. 让学生掌握机械原理的基本概念,如力、功、能量等;2. 使学生了解搬运机的基本结构及其工作原理;3. 帮助学生理解并运用机械原理解决实际搬运问题。
技能目标:1. 培养学生运用机械原理分析并设计简单搬运机的能力;2. 提高学生动手实践能力,学会制作和调试搬运机模型;3. 培养学生团队协作能力和沟通表达能力,能在小组讨论中积极发表见解。
情感态度价值观目标:1. 激发学生对机械原理学科的兴趣,培养其探索精神和创新意识;2. 培养学生关注现实问题,将所学知识应用于实际生产和生活中的意识;3. 引导学生树立正确的价值观,认识到机械在国民经济发展中的重要作用。
课程性质:本课程为理论与实践相结合的课程,以学生动手实践为主,注重培养学生的创新能力和实践能力。
学生特点:六年级学生对机械原理有一定的认识,具备基本的动手实践能力,好奇心强,有探索精神。
教学要求:教师应关注学生的个体差异,引导他们积极参与课堂讨论和实践活动,鼓励创新思维,培养解决问题的能力。
通过课程学习,使学生将理论知识与实际应用紧密结合,提高综合素养。
二、教学内容1. 理论知识:- 机械原理基本概念:力、功、能量等;- 搬运机结构及工作原理:皮带输送机、链条输送机、齿轮传动等;- 机械效率及其计算方法。
2. 实践操作:- 搬运机模型的制作与调试;- 动手实践:组装搬运机各部件,观察并分析其工作过程;- 小组合作:设计并制作一部简易搬运机,展示其功能并优化。
3. 教学大纲安排:- 第一周:机械原理基本概念学习;- 第二周:搬运机结构及工作原理学习;- 第三周:动手实践,制作搬运机模型;- 第四周:小组合作,设计并优化搬运机,展示与分享。
4. 教材关联:- 《机械原理》教材第三章:机械传动;- 《机械原理》教材第四章:机械效率;- 《机械原理》教材附录:搬运机实例分析。
教学内容科学系统,结合理论教学与实践操作,使学生能够全面掌握机械原理及其在搬运机中的应用。
机械原理课程设计
机械原理课程设计是针对机械原理课程内容的实践性学习任务。
在这个课程设计中,我将与同组的同学合作完成一个小组项目。
我们的任务是设计一个简单的机械装置,并使用机械原理的知识来分析和解决实际问题。
首先,我们选择了一个实际应用场景,即利用机械装置将物体从一个位置移到另一个位置。
我们考虑到需要设计一个简单的提升装置,可以通过旋转柄操作,实现机械臂的上下运动。
在设计过程中,我们首先进行了物体的重量计算和估算,以确定装置需要具备的承重能力。
我们选择了一种简单的滚动轴承和轴承座结构,以提供稳定的支撑能力。
接下来,我们设计了一个包括齿轮和链条的传动系统,以将旋转运动转化为上下运动。
通过计算和选择适当的齿轮和链条参数,我们保证了系统的传动效果和工作效率。
在设计过程中,我们还考虑了装置的安全性和可靠性。
我们添加了一个紧急停止按钮和限位开关,以确保在发生意外情况时能够及时停止装置的运动。
我们还选择了高强度的材料,并进行了必要的强度计算和结构分析,以确保装置在工作过程中能够承受所需的载荷和应力。
最后,我们使用SolidWorks等CAD软件进行了装置的三维建
模和仿真。
通过对装置进行动力学分析和优化,我们验证了设计的合理性,并进行了必要的调整和改进。
通过这个课程设计,我学到了机械原理理论知识的应用,并锻炼了团队合作和解决问题的能力。
这个实践性学习任务让我更加深入地理解了机械原理的重要性和应用价值。
我相信这些经验将对我今后的学习和工作都有很大的帮助。
《机械原理》课程设计任务书(1)一、设计题目: 糕点切片机1.工作原理及工艺动作过程糕点先成型(如长方体、圆柱体等)经切片后再烘干。
糕点切片机要求实现两个执行动作:糕点的直线间歇移动和切刀的往复运动。
通过两者的动作配合进行切片。
改变直线间歇移动速度或每次间隔的输送距离, 以满足糕点不同切片厚度的需要。
2.原始数据及设计要求1)糕点厚度。
10~20mm。
2)糕点切片长度(亦即切片的高)范围。
5~80 mm。
3)切刀切片时最大作用距离(亦即切片的宽度方向)300 mm。
4)切刀工作节拍。
40次/min。
5)生产阻力很小。
要求选用的机构简单、轻便、运动灵活可靠。
6)电动机可选用0.55kw(或0.75kw)、1390/min。
3.设计方案提示1)切削速度较大时, 切片刀口会整齐平滑, 因此切刀运动方案的选择很关健, 切口机构应力求简单适用、运动灵活和运动空间尺寸紧凑等。
2)直线间歇运动机构如何满足切片长度尺寸的变化要求, 是需要认真考虑的。
调整机构必须简单可靠, 操作方便。
是采用调速方案, 还是采用调距离方案, 或者采用其它调整方案, 均应对方案进行定性的分析比较。
3)间歇运动机构必须与切刀运动机构工作协调, 即全部送进运动应在切刀返回过程中完成。
需要注意的是, 切口有一定的长度(即高度), 输送运动必须在切刀完全脱离切口后方能开始进行, 但输送机构的返回运动则可与切刀的工作行程运动在时间上有一段重叠, 以利提高生产率, 在设计机器工作循环图时, 就应按上述要求来选取间歇运动机构的设计参数。
4.设计任务1)根据工艺运动作顺序和协调要求拟定运动循环图;2)进行间歇运动机构和切口机构的选型, 实现上述动作要求;3)机械运动方案的评定和选择;4)根据选定的原动机和执行机构的运动参数拟定机械传动方案;5)画出机械运动方案简图(机械运动示意图);6)对机械传动系统和执行机构进行尺度设计。
二、设计工作量1.2号或3号图纸二张(包括: 运动循环图和机械运动方案简图)。
机械原理课程设计说明书1机械原理课程设计题目:块状物品推送机班级:2012级机械设计制造及其自动化2班 组员:胡鑫亮(组长) 刘润华 张鹏飞 郭日哲李东杰 黄玉指导教师: 康辉梅工程与设计学院2014年6月12日目录分工明细 (3)一.设计任务书 (4)1.设计题目 (4)2. 设计条件及要求 (4)3。
设计任务 (4)二.方案选择 (5)方案一 (5)方案二 (6)方案三 (6)三。
基本参数 (7)1.凸轮设计 (7)2.带传动 (8)3.蜗轮蜗杆 (9)4.减速系统设计 (9)5.电动机性能要求 (10)6.电动机的功率及满载转速分析 (10)四.滚子从动件各个阶段相关方程 (10)位移速度及加速度变化曲线 (12)编程结果 (15)三维模型 (18)五.心得体会 (20)六.参考文献 (21)机械原理课程设计说明书2分工明细:组长:胡鑫亮方案设计:胡鑫亮,张鹏飞,刘润华,郭日哲,李东杰,黄玉数据计算:胡鑫亮,张鹏飞,刘润华,郭日哲,李东杰,黄玉三维模型制作:张鹏飞,刘润华,胡鑫亮仿真分析:胡鑫亮设计说明书:郭日哲PPT制作:黄玉数据核对:郭日哲,李东杰,黄玉机械原理课程设计说明书3一.设计任务书1.设计题目:块状物品推送机2.设计条件及要求:1。
向上推送距离:120mm。
生产率:120件/min2.原动机为同步转速为3000r/min的三相交流电动机。
通过减速装置带动执行机构主动件等速转动。
3。
由物品处于最低位置时开始,当执行机构主动件转过150°时,推杆从最低位置运动到最高位置;当主动件在转过120°时,推杆从最高位置又回到最低位置;最后当主动件再转过90°时,推杆在最低位置停留不动。
4.设推杆上升过程中所受的物品重力和摩擦力为常数,其值为500N;设推杆下降过程中所受摩擦力为常数,其值为100N。
5. 在满足行程的条件下,要求推送机的效率高(推程最大压力角小于35°),结构紧凑,振动噪声小.3.设计任务1.至少提出三种运动方案,然后进行方案分析评比,选出一种运动方案进行机构综合;2.确定电动机的功率与满载转速;3.设计传动系统中各机构的运动尺寸,绘制推送机的机构运动简图;机械原理课程设计说明书44.在假设电动机等速运动的条件下,绘制推杆在一个运动周期中位移、速度和加速度变化曲线;5.编写课程设计说明书。
机械原理课程设计快递分拣一、课程目标知识目标:1. 学生能够理解并掌握机械原理中的基础概念,如力、运动、能量等,并能够将这些概念应用于快递分拣机械的运作过程中。
2. 学生能够描述并分析快递分拣机械的基本结构及其工作原理,包括传动系统、控制系统等。
技能目标:1. 学生能够运用所学的机械原理知识,设计并制作一个简单的快递分拣模型,展示其分拣过程。
2. 学生能够通过团队合作,解决快递分拣过程中可能遇到的问题,提高实际操作能力和问题解决能力。
情感态度价值观目标:1. 学生通过本课程的学习,培养对机械原理学科的兴趣,激发创新意识和探索精神。
2. 学生能够认识到机械原理在快递分拣行业中的重要性,增强社会责任感和使命感。
3. 学生在团队合作中,学会尊重他人、沟通交流,培养合作精神和集体荣誉感。
课程性质:本课程为实践性较强的学科课程,结合学生年级特点,注重理论联系实际,提高学生的动手能力和创新能力。
学生特点:学生处于初中阶段,具备一定的物理基础和动手能力,对新鲜事物充满好奇心,但需引导他们将理论知识运用到实际操作中。
教学要求:教师应结合课程目标和学生学习特点,采用启发式教学,引导学生主动探究,注重培养学生的实践能力和团队协作能力。
在教学过程中,关注学生个体差异,提供个性化指导,确保课程目标的实现。
二、教学内容1. 理论知识:- 介绍机械原理基本概念,如力的作用、简单机械、能量转换等。
- 分析快递分拣机械的结构特点,如传送带、分拣机械臂、传感器等。
- 讲解机械原理在快递分拣过程中的应用,如力的合成、运动轨迹、速度与加速度等。
2. 实践操作:- 设计并制作一个简单的快递分拣模型,让学生动手实践,加深对机械原理的理解。
- 安排学生进行团队合作,探讨快递分拣过程中可能遇到的问题及解决方案。
3. 教学大纲:- 第一周:机械原理基本概念学习,介绍快递分拣机械结构。
- 第二周:分析快递分拣机械工作原理,讲解相关理论知识。
- 第三周:设计并制作快递分拣模型,进行初步实践。
机械原理课程设计说明书设计题目:块状物品推送机的机构综合与结构设计班级:姓名:学号:同组成员:组长:指导教师:时间:一、设计题目 (2)二、设计数据与要求 (2)三、设计任务 (3)四、方案设计 (4)1.凸轮连杆组合机构 (4)2.凸轮机构 (5)3.连杆机构 (6)4.凸轮齿轮组合机构 (7)五、方案尺寸数据及发动机参数 (7)六、运动分析 (8)1.位移分析 (8)2.速度分析 (9)3.加速度分析 (10)七、飞轮设计 (11)八、个人总结 (12)一、设计题目在自动包裹机的包装作业过程中,经常需要将物品从前一工序转送到下一工序。
现要求设计一用于糖果、香皂等包裹机中的物品推送机,将块状物品从一位置向上推送到所需的另一位置,如图所示。
二、设计数据与要求1.向上推送距离H=120mm,生产率为每分钟推送物品120件。
2.推送机的原动机为同步转速为3000转/分的三相交流电动机,通过减速装置带动执行机构主动件等速转动。
3.由物品处于最低位置时开始,当执行机构主动件转过1500时,推杆从最低位置运动到最高位置;当主动件再转过1200时,推杆从最高位置又回到最低位置;最后当主动件再转过900时,推杆在最低位置停留不动。
4.设推杆在上升运动过程中,推杆所受的物品重力和摩擦力为常数,其值为500N;设推杆在下降运动过程中,推杆所受的摩擦力为常数,其值为100N。
5.使用寿命10年,每年300工作日,每日工作16小时。
6.在满足行程的条件下,要求推送机的效率高(推程最大压力角小于350),结构紧凑,振动噪声小。
三、设计任务1.至少提出三种运动方案,然后进行方案分析评比,选出一种运动方案进行机构综合。
2.确定电动机的功率与满载转速。
3.设计传动系统中各机构的运动尺寸,绘制推送机的机构运动简图。
4.在假设电动机等速运动的条件下,绘制推杆在一个运动周期中位移、速度和加速度变化曲线。
5.如果希望执行机构主动件的速度波动系数小于3%,求应在执行机构主动件轴上加多大转动惯量的飞轮。
6.进行推送机减速系统的结构设计,绘制其装配图和两张零件图。
7.编写课程设计说明书。
四、方案设计1.凸轮连杆组合机构凸轮-连杆组合机构也可以实现行程放大功能,在水平面得推送任务中,优势较明显,但在垂直面中就会与机架产生摩擦,加上凸轮与摆杆和摆杆与齿条的摩擦,积累起来,摩擦会很大,然后就是其结构较为复杂,非标准件较多,加工难度比较大,从而生产成本也比较大,连杆机构上端加工难度大,而且选材时,难以找到合适的材料,使其既能满足强度刚度条件又廉价,因此不宜选择该机构来实现我们的设计目的。
方案结构简单紧凑,噪音小,运用蜗轮蜗杆传递动力,采用了带传动,凸轮机构回转运动,易于完成小范围内的物料推送任务,效率较高并且运动精确稳定效应迅速,可使推杆有确定的运动,完全符合设计目标。
利用等价的平面连杆机构实现机构的推送任务,几何封闭,传送稳定性高,通过设计合适的杆长可以实现预期的运动,当以AB杆作为原动件时,运动传到推杆K产生一定的增力效果,但是此机构由于运用了很多杆件,进行了多次中间传力,会导致机械效率的降低和误差的积累,而且连杆及滑块产生的惯性力难以平衡加以消除,因此在高速推送任务中,不宜采用此机构。
4.凸轮齿轮组合机构凸轮-齿轮组合机构,可以将摆动从动件的摆动转化为齿轮齿条机构的齿条直线往复运动。
当扇形齿轮的分度圆半径大于摆杆长度时,可以加大齿条的位移量。
但是比较难设计,不好实现。
经过比较,选定方案2。
五、方案尺寸数据及发动机参数经程序运算和查询相关资料,最终尺寸确定为凸轮基圆半径r0=100mm, 推程h=120mm,滚子半径rb=20mm;经附录程序运算,得推程最大压力角为29.8度,符合要求。
蜗杆m=4,头数为一,分度圆直径d=40mm;右旋;蜗轮m=4,齿数25,分度圆直径d=100mm ; V 带基准长度250;带轮1基准直径a d =50,外径a d =52.2; 槽型为 Y ;带轮2基准直径ad =20,外径ad =23.2 槽型为 Y ;电动机效率η1 =80% 单头蜗杆传动效率η2= 75% V 带传送效率η3=85% 凸轮传动效率η4= 95% 移动副传动效率η5= 95%电动机型号选为YD100L-6/4/2型三项异步电机,此电动机额定功率为1.8KW ,工作电压为380V ,额定电流为4.8A ,额定转速为3000r/min,转子转动惯量为0.0014Kg*2m 。
计算可知,在一个工作周期T=0.5s 中, 阻力功w=(500*120+100*120)*0.001=0.072 J ; 阻力功率p1=w/T=0.144J/s ,机构总效率η=η1*η2*η3*η4*η5=0.3826; 机构驱动力功率p2=p1/η=0. 3764 J/s=1.36kw六、运动分析1.位移分析2212/s h δδ=1(0,/2]δδ∈22112()/s h h δδδ=--11(/2,]δδδ∈21[1cos()]/2s h πδδδ=+- 12(,]δδδ∈其中1δ=150°,2δ=270°由曲线可知,在一个周期内推杆位移先增加(0°-150°)后减小(150°-270°)后不变(270°-360°),符合推杆先上升后下降再停顿。
2.速度分析214/v h δδ=1(0,/2)δδ∈2114()/v h δδδ=--11(/2,)δδδ∈2121sin()v ππδδδδδ=---12(,)δδδ∈其中1δ=150°,2δ=270°凸轮的推程(0°-150°)选择的是等加速等减速运动规律,由上图可知在150°之前,无速度突变即无刚性冲击,推杆速度先均匀增大后均匀较小至零。
回程时(150°-270°)选择的是五次多项式运动规律,先增加后减小至零,曲线完全符合,无速度突变亦即无刚性冲击。
近休时(270°-360°),速度为零,无刚性冲击。
3.加速度分析214/a h δ= 1(0,/2)δδ∈214/a h δ=11(/2,)δδδ∈22121()cos()a ππδδδδδ=--- 12(,)δδδ∈其中1δ=150°,2δ=270°凸轮的推程(0°-150°)选择的是等加速等减速运动规律,在开始时(0°)、(75°-80°)、(150°)加速度有突变,但是突变有限,因而引起的冲击较小,故只存在柔性冲击。
回程时(150°-270°)选择的是五次多项式运动规律,由曲线可知加速度无突变,即无柔性冲击。
启动电机,通过带传动涡轮蜗杆传动减速并带动凸轮转动,凸轮推动推杆运动。
最初150度,凸轮从最低点运动到最高点作推程运动时,推杆推送物品作上升运动,同时压缩弹簧。
接下来120度,凸轮从最高点作回程运动时,推杆在自身重力和弹簧弹力的作用下作下降运动。
最后的的90度推杆在最低位置静止不动。
电动机不断地提供电能带动整个装置的传动,完成构件上下往复运动,把一个物品从一个位置推送到另一个位置。
七、飞轮设计由五可得△Wmax=0.1162JWm=w=4*Π;m;Jf=△Wmax/([δ]*Wm*Wm)-Je=0.0232 Kg*2八、个人总结实际操作永远不会像想象的那样简单。
在平常的学习中,尽管自己不承认,但多多少少还是存在眼高手低的情况。
这次的课程设计就给了自己当头一棒,刚开始的时候完全不懂。
通过在网上查找资料,到图书馆借书才逐渐理清头绪。
这次课程设计对对机械原理的掌握要求非常高,而且不仅仅如此,它还需要我们学习CAD、C语言、ADAMS、MATLAB等软件,是一次对综合能力的考察。
虽然这次的课程设计完成了,但是借鉴了不少前辈的经验,自己还有很多地方需要努力,而这也许才是这次课程设计最重要的收获。
最后要感谢我的队友的大力帮助以及老师的辛勤教导。
参考文献:《机械原理》第七版高等教育出版社孙恒《机械原理课程设计指导》北京航空航天大学出版社张晓玲《机械原理课程设计》高等教育出版社裘建新《机械原理创新设计》华中科技大学出版社强建国《ADAMS 2005 机械设计高级应用实例》机械工业出版社郑凯凸轮部分代码:#include<stdio.h>#include<math.h>#include<stdlib.h>#define PI 3.141592653double fact[72][2];double theory[72][2];int ang1=150,ang2=270,ang3=360;double h=120, rb=60,b=2;double A1=30*PI/180, A2=70*PI/180;double P=13,e=0;double So,r=18;double S(int I){double s;double A;double B;if(I<=ang1/2){A=I*PI/180;B=ang1*PI/180;s=2*h*pow(A/B,2);}else if((I>ang1/2)&&(I<=ang1)){A=I*PI/180;B=ang1*PI/180;s=h-2*h*pow((B-A)/B,2);}else if(I<=ang2){A=(I-ang1)*PI/180;B=(ang2-ang1)*PI/180;s=h-(10*h*pow(A/B,3)-15*h*pow(A/B,4)+6*h*pow(A/B,5));}else s=0;return(s);}double ds(int Q){double A,B,C;if(Q<=ang1/2){A=Q*PI/180;B=ang1*PI/180;C=4*h*A/(B*B);}else if((Q>ang1/2)&&(Q<=ang1)){A=Q*PI/180;B=ang1*PI/180;C=4*h*(B-A)/(B*B);}else if(Q<=ang2){A=(Q-ang1)*PI/180;B=(ang2-ang1)*PI/180;C=-30*h*A*A/pow(B,3)+60*h*pow(A,3)/pow(B,4)-30*h*pow(A,4)/pow(B,5);}else C=0;return C;}double dss(int B3){double A,B,C;if(B3<=ang1/2){A=B3*PI/180;C=ang1*PI/180;B=4*h/(C*C);}else if(B3>ang1/2&&B3<=ang1){A=B3*PI/180;C=ang1*PI/180;B=-4*h/(C*C);}else if(B3<=ang2){A=(B3-ang1)*PI/180;C=(ang2-ang1)*PI/180;B=-60*h* A/pow(C,3)+180*h*A*A/pow(C,4)-120*h*pow(A,3)/pow(C,5);}else B=0;return(B);}void xy(int ang){double A,B,C,E,F,dx,dy;A=ang*PI/180;B=S(ang);C=ds(ang);dx=(So+B)*cos(A)+sin(A)*C-e*sin(A);dy=-sin(A)*(So+B)+C*cos(A)-e*cos(A);E=r*dy/sqrt(dx*dx+dy*dy);F=r*dx/sqrt(dx*dx+dy*dy);theory[ang/5][0]=(So+B)*sin(A)+e*cos(A);theory[ang/5][1]=(So+B)*cos(A)-e*sin(A);fact[ang/5][0]=theory[ang/5][0]-E;fact[ang/5][1]=theory[ang/5][1]+F;}double a(int B1)/*****求解压力角****/{double A,B;A=sqrt((ds(B1)-e)*(ds(B1)-e));B=S(B1);return atan(A/(B+So));}double p(int B2){double dx,dy,dxx,dyy;double A,B,C,D,E;A=B2*PI/180;B=ds(B2);C=S(B2);D=dss(B2);dx=(So+C)*cos(A)+sin(A)*B-e*sin(A);dy=-sin(A)*(So+C)+B*cos(A)-e*cos(A);dxx=-(C+So)*sin(A)+cos(A)*B+D*sin(A)-e*cos(A);dyy=-cos(A)*(So+C)-B*sin(A)+D*cos(A)-sin(A)*B+e*sin(A);E=sqrt(pow(dx*dx+dy*dy,3))/sqrt(pow((dx*dyy-dxx*dy),2));return(E);}//计算数据并写入文件void main(){ FILE *fp;int i;int k,h,l;double angle1max=0,angle2max=0,pmin=1000;if((fp=fopen("f:\\sanying","w"))==NULL){printf("Cann't open this file.\n");exit(0);}fprintf(fp,"\n The Kinematic Parameters of Point 4\n");fprintf(fp," x y x' y' ");for(;i!=360;){rb=rb+b;So=sqrt(rb*rb-e*e);for(i=0;i<=ang1;i=i+5){if(a(i)>A1||p(i)<P)break;}if(ang1+5-i)continue;for(i=ang1+5;i<=ang2;i=i+5){if(a(i)>A2||p(i)<P)break;}if(ang2+5-i)continue;for(i=ang2+5;i<360;i=i+5){if(p(i)<P)break;}}for(i=0;i<360;i=i+5){xy(i);}for(i=0;i<=ang1;i=i+5){if(angle1max<a(i)){angle1max=a(i);k=i;}if(pmin>p(i)){pmin=p(i);h=i;}}for(i=ang1;i<=ang2;i=i+5){if(angle2max<a(i)){angle2max=a(i);l=i;}if(pmin>p(i)){pmin=p(i);h=i;}}for(i=0;i<72;i++){fprintf(fp,"\n");{fprintf(fp,"%12.3f\t%12.3f\t%12.3f\t%12.3f\t ",theory[i][0],theory[i][1],fact[i][0],fact[i][1]);}}fclose(fp);printf(" 理论坐标(x,y) ");printf("实际坐标(x,y)");printf("\n");for(i=0;i<72;i++){printf("%f ",theory[i][0]);printf(" ");printf("%f ",theory[i][1]);printf(" ");printf("%f ",fact[i][0]);printf(" ");printf("%f ",fact[i][1]);printf("\n");}printf("基圆半径是:%f\n",rb);printf("推程最大压力角是:%f\n",angle1max*180/PI);printf("此时角度是是:%d\n",k);printf("回程最大压力角是:%f\n",angle2max*180/PI);printf("此时角度是是:%d\n",l);printf("最小曲率半径是:%f\n",pmin);printf("此时角度是:%d\n",h);推杆运动学分析部分代码:#include<stdio.h>#include<math.h>#include<stdlib.h>#define PI 3.141592653void main(){double h=120;int ang1=150,ang2=270,ang3=360;double s[72],v[72],a[72];double A ,B; int i;for(i=0;i<ang1;i+=5){if(i<=ang1/2){A=i*PI/180;B=ang1*PI/180;s[i/5]=2*h*pow(A/B,2);v[i/5]=4*h*A/(B*B);a[i/5]=4*h/(B*B);}else {A=i*PI/180;B=ang1*PI/180;s[i/5]=h-2*h*pow((B-A)/B,2);v[i/5]=4*h*(B-A)/(B*B);a[i/5]=-4*h/(B*B);}}for(i=ang1;i<ang2;i+=5){A=(i-ang1)*PI/180;B=(ang2-ang1)*PI/180;s[i/5]=h-(10*h*pow(A/B,3)-15*h*pow(A/B,4)+6*h*pow(A/B,5)); v[i/5]=-30*h*A*A/(B*B*B)+60*h*A*A*A/(B*B*B*B)-30*h*A*A*A*A/(B*B*B*B*B); a[i/5]=-60*h*A/(B*B*B)+180*h*A*A/(B*B*B*B)-120*h*A*A*A/(B*B*B*B*B);}for(i=ang2;i<ang3;i+=5){s[i/5]=0;v[i/5]=0;a[i/5]=0;}for(i=0;i<72;i++)printf("%f %f %f\n",s[i],v[i]*4*PI,a[i]*4*PI);}。