块状物品推送机构的设计
- 格式:pptx
- 大小:1.42 MB
- 文档页数:19
自动分拣机械手结构设计目录1 绪论 (2)2 总体方案设计与指标 (4)2.1 总体设计规格与相关参数 (4)2.2总体方案设计 (4)2.2.1主体功能 (4)2.2.2执行机构 (5)2.2.3驱动机构 (6)2.2.4控制系统 (6)3 机构分析 (9)3.1机械手总体设计 (9)3.1.1机械手基本形式的选择 (9)3.1.2机械手的主要部件及运动 (9)3.1.3驱动机构的选择 (9)3.1.4机械手的技术参数列表 (10)3.2机身的总体设计 (10)4 关键部件设计与校核 (12)4.1选择手抓的类型及夹紧装置 (12)4.2 手抓的力学分析 (13)4.3机械手手抓夹持精度的分析计算 (14)5 结论 (16)参考文献 (17)1 绪论现代化的计算机网络科学和信息技术的确是一场新型产业革命,将整个西方世界的知识经济由传统资本主义经济模式引入并带到了现代知识经济的新发展时代。
在现代电子信息世界的各个领域,从20世纪时代中的一个新型无线电通信时代也已经开始直到进入21世纪以家用计算机和其他信息电子技术应用为设计核心的一个现代化和智能化新型家用电子系统时代。
而传统的机械手控制系统则逐渐发展成熟到与电脑进行互联,使得机械手控制的系统变得更加的智能化,操作也变得更加简易方便。
随着工业自动化的进一步发展,机械手(或称工业机器人)的应用将更加普遍,尤其随着我国的物流行业和仓储行业的进一步发展,西欧、日本、苏联和中国等偏远地区的机械手也已经开始了百花争放,未来整个人类经济社会将不断更新各种各样的新型分拣机械手。
本项目中所设计的自动分拣机械手隶属于搬运机械手。
所谓的搬运式机械手,就是把一个机械手直接安装到一个移动式的平台之上。
这种架构使得机械手具备了很大的可以移动操纵空间及较高的运动冗余性,并且同时还具备了移动和可以操纵的功能,这样会使它比其他传统机械手更加优于现代化的机械手,因此在危险工程作业、制造商、服务业等领域具有广泛的应用和发展前景。
块状物料机器手抓取式装箱机设计李响;马永;何偲;王汀;牛雅宁;赵伟【摘要】为实现食品包装过程自动化,设计抓取式装箱机,用于多种物料装箱,特别是用于块状物料装箱.详细介绍各部件的工作原理及控制方法,重点介绍机器人的结构特点.经测试,机器人抓取速度可以达到2 s/次.【期刊名称】《食品与机械》【年(卷),期】2010(026)005【总页数】4页(P109-111,176)【关键词】抓取式装箱机;机器手;控制系统【作者】李响;马永;何偲;王汀;牛雅宁;赵伟【作者单位】武汉人天包装技术有限公司,湖北,武汉,430205;武汉人天包装技术有限公司,湖北,武汉,430205;武汉人天包装技术有限公司,湖北,武汉,430205;武汉人天包装技术有限公司,湖北,武汉,430205;武汉人天包装技术有限公司,湖北,武汉,430205;武汉人天包装技术有限公司,湖北,武汉,430205【正文语种】中文目前,中国自动化装箱生产线大多为跌落式装箱和侧推式装箱,但随着食品包装产品形式的多样化,越来越多的食品包装物既不适合跌落式装箱又不适合侧推式装箱,导致该类食品包装物装箱生产线大部分工作仍需人工操作。
在发达国家,该类食品包装物自动化装箱生产线已经得到实质性突破,即机器人装箱;而对于中国食品生产厂家,采用机器人装箱设备成本过高[1-4]。
为此设计一种以机器手为主体的抓取式装箱机,要求整机工作效率高、适应性广、调整方便、成本适中、便于制造,可有效地解决快速、灵活的多种物料装箱的问题,以提高中国包装生产线的自动化水平。
目前,中国可以称之为抓取式装箱机的大致有4种,分别用在不同的条件下:(1)啤酒、饮料等行业[5]抓取式装箱机。
这种装箱机专门用于啤酒饮料等瓶状物料的装箱,采用普通电机和连杆等机械结构,运动轨迹固定,抓取夹具固定,运动速度较慢,可以多箱同时装箱,在啤酒饮料行业应用非常有效,但不太适用于其它物料装箱。
(2)坐标式机器手装箱机。
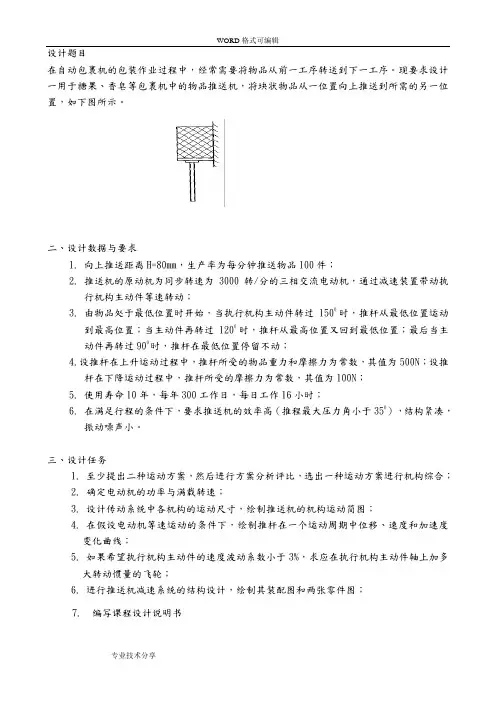
设计题目在自动包裹机的包装作业过程中,经常需要将物品从前一工序转送到下一工序。
现要求设计一用于糖果、香皂等包裹机中的物品推送机,将块状物品从一位置向上推送到所需的另一位置,如下图所示。
二、设计数据与要求1. 向上推送距离H=80mm,生产率为每分钟推送物品100件;2. 推送机的原动机为同步转速为3000转/分的三相交流电动机,通过减速装置带动执行机构主动件等速转动;3. 由物品处于最低位置时开始,当执行机构主动件转过1500时,推杆从最低位置运动到最高位置;当主动件再转过1200时,推杆从最高位置又回到最低位置;最后当主动件再转过900时,推杆在最低位置停留不动;4.设推杆在上升运动过程中,推杆所受的物品重力和摩擦力为常数,其值为500N;设推杆在下降运动过程中,推杆所受的摩擦力为常数,其值为100N;5. 使用寿命10年,每年300工作日,每日工作16小时;6. 在满足行程的条件下,要求推送机的效率高(推程最大压力角小于350),结构紧凑,振动噪声小。
三、设计任务1. 至少提出二种运动方案,然后进行方案分析评比,选出一种运动方案进行机构综合;2. 确定电动机的功率与满载转速;3. 设计传动系统中各机构的运动尺寸,绘制推送机的机构运动简图;4. 在假设电动机等速运动的条件下,绘制推杆在一个运动周期中位移、速度和加速度变化曲线;5. 如果希望执行机构主动件的速度波动系数小于3%,求应在执行机构主动件轴上加多大转动惯量的飞轮;6. 进行推送机减速系统的结构设计,绘制其装配图和两张零件图;7. 编写课程设计说明书方案一:连杆机构图1所示的连杆机构由曲柄摇杆机构ABCD与曲柄滑块机构GHK通过连杆EF相联组合而成。
连杆BC上E点的轨迹,在部分近似呈以F点为圆心的圆弧形,因此,杆FG在图示位置有一段时间实现近似停歇。
图1方案二:凸轮机构图2所示的凸轮机构,由凸轮、从动件、和机架三个基本构件组成,能使从动件获得较复杂的动动规律,因为从动件的运动规律取决于凸轮轮廓曲线,所以在应用时只根据从动件的运动规律来设计轮廓曲线就可以了。

直动式固定凸轮与连杆机构的设计设计者:姜泽成所在院(系):湖南工业大学专业:机械设计制造及其自动化班级:机设1003班学号:10405100205指导老师:贺兵时间:2013年12月27日目录一、课程设计的目的 (1)二、设计内容与步骤 (1)1、设计内容 (1)2.设计步骤 (2)三、设计要求 (2)四、设计指导 (3)1、概述 (3)2、基本参数 (6)3、设计步聚 (7)1)确定驱动方案 (7)2)确定e (8)3)确定h (8)4)确定α (8)5)确定δ (8)6)求算b1、b2 (9)7)设计凸轮廊线 (10)8)检验压力角 (11)五、参数优化 (13)六、结论 (14)七、参考文献 (14)八、附图 (15)摘要包装设计课程设计是在完成机械设计课程学习后,一次重要的实践性教学环节。
是高等工科院校大多数专业学生第一次较全面的设计能力训练,也是对机械设计课程的全面复习和实践。
其目的是培养理论联系实际的设计思想,训练综合运用机械设计和有关选修课程的理论,结合生产实际分析和解决工程实际问题的能力,巩固、加深和扩展有关机械设计方面的知识。
本次设计的题目是直动式固定凸轮与连杆机构的设计。
根据题目要求和机械设计的特点作者做了以下几个方面的工作:①根据有关参数进行计算或编写有关设计计算程序;②利用程序设计的方法输出结果并自动生成图形;③画出装配图及其主要零件图;④完成设计计算说明书。
正文要求:宋体四号首行缩进两个字符;一级目录不缩进(二号字体),二级目录缩进0.5个字符(三号字体);三级目录缩进两个字符(小三字体);正文在目录下首行缩进两个字符。
一、课程设计的目的《包装机械设计》课程设计是本课程各教学环节中重要的一环,它让学习者联系实际进一步深入理解、掌握所学的理论知识。
其基本目的是:培养理论联系实际的设计思想,训练综合运用包装机械和有关先修课程的理论,结合生产实际分析和解决工程实际问题的能力,巩固、加深和扩展有关包装机械设计方面的知识。
包装机推包机构运动方案设计随着科技的不断发展,包装机在各行业中的应用越来越广泛,它能够有效地提高生产效率,降低人工成本。
然而,为了满足各种不同的包装需求,我们需要对包装机的推包机构进行深入的设计和研究。
本文将重点探讨包装机推包机构的运动方案设计。
推包机构是包装机的重要组成部分,主要负责将包装物推向包装机的下一个环节。
通常情况下,推包机构由推头、推送轨道、推送电机以及相关的机械部件组成。
其中,推头是推包机构的核心部分,它能够精确控制包装物的位置和速度。
推送轨道则为推头提供了导向,使推头能够准确地将包装物推向下一个环节。
推送电机则是提供动力的来源,通过调控电机的转速和转矩,可以控制推头的运动速度和力量。
推包机构的运动方案设计应考虑以下几个方面:运动平稳性:为了确保包装物的完整性和避免由于剧烈冲击引起的破损,推包机构的运动应当平稳。
在设计中,可以通过优化推送电机的控制算法来实现这一目标。
定位精度:推包机构需要精确地将包装物定位到包装机的下一个环节。
因此,在设计推包机构时,需要考虑到定位精度的问题。
例如,可以通过使用高精度的传感器和优化机械部件的制造精度来提高定位精度。
适应性:为了满足不同包装物的要求,推包机构应具有一定的适应性。
例如,可以通过设计可调节的推送轨道和可更换的推头来适应不同的包装物形状和尺寸。
维护方便性:推包机构在使用过程中需要进行定期维护和保养,因此,在设计推包机构时,应考虑到维护方便性的问题。
例如,可以设计易于拆卸的机械部件和便于观察的指示灯来提高维护方便性。
包装机推包机构的运动方案设计是包装机设计的关键部分。
在设计过程中,需要考虑运动平稳性、定位精度、适应性和维护方便性等多个方面。
通过优化设计方案,可以提高包装机的性能和效率,降低包装成本,提高产品的质量和竞争力。
随着科技的不断进步,我们还需要不断研究和探索新的技术手段和应用领域,以推动包装机技术的不断发展。
随着科技的发展和人们对包装机械需求的增长,茶叶包装机成为了茶叶产业中不可或缺的一部分。
板材推送机送料台结构设计及有限元分析与改进战丽,匡立莲,马岩,任长清(东北林业大学,哈尔滨150040)摘要:目的针对目前人工下料成本高、生产率低的问题,设计一种新型物料设备。
该新型设备可实现精准上料,即根据操作人员需要锯切的层数及单层板材的厚度进行上料。
方法方法针对送料台的结构强度,采用Ansys 软件对其三维模型进行有限元静强度分析。
结果结果分析得出了叉车臂切口强度薄弱,进而提出了一种改进方案并再次进行有限元验证分析。
结论结论最终强度满足了设计要求,达到了提高生产效率的目的。
关键词:新型送料设备;送料台;有限元分析;结构强度;改进设计中图分类号:TB486+.3文献标识码:A文章编号:1001-3563(2016)05-0146-05Structure Design,Finite Analysis and Improved Design ofSheet Feeding TableZHAN Li ,KUANG Li-lian ,MA Yan ,REN Chang-qing(Northeast Forestry University ,Harbin 150040,China )ABSTRACT :Targeting at the high labor costs and low productivity of manual feeding,this work aimed to design a new type of material equipment,self-propelled CNC sheet feeding table.The new equipment could achieve precise feeding according to the number of layers required to be cut by the operator and the thickness of single-layer board.Feeding table as a key component of bearing raw materials,its actual working conditions directly affects the stability and reliability performance of operation.For its structural strength,Ansys software was used to conduct finite element static strength analysis of its 3D model.The results showed weak strength in the forklift arm notch.Then an improved scheme was proposed and finite element verification analysis was conducted again.The final strength met the design requirements,improving the production efficiency.KEY WORDS :new feeding equipment ;feeding station ;finite element analysis ;structural strength ;improved design收稿日期:2015-07-03基金项目:黑龙江省应用技术研究与开发计划(GA14A401)作者简介:战丽(1971—),女,黑龙江人,博士,东北林业大学教授,主要研究方向为机械设计及理论。