捷联惯导系统快速罗经初始对准方法研究
- 格式:pdf
- 大小:383.84 KB
- 文档页数:10
分类号:密级:U D C :编号:工学硕士学位论文捷联惯导系统高度阻尼与罗经对准技术研究硕士研究生:张强指导教师:奔粤阳副教授学科、专业:仪器科学与技术论文主审人:王伟教授哈尔滨工程大学2018年3月分类号:密级:U D C :编号:工学硕士学位论文捷联惯导系统高度阻尼与罗经对准技术研究硕士研究生:张强指导教师:奔粤阳副教授学位级别:工学硕士学科、专业:仪器科学与技术所在单位:自动化学院论文提交日期:2018年1月论文答辩日期:2018年3月学位授予单位:哈尔滨工程大学Classified Index:U.D.C:A Dissertation for the Degree of M. EngThe Research on the High Damping and Compass Alignment Technology of SINSCandidate:Zhang QiangSupervisor:Ben Yueyang Associate ProfessorAcademic Degree Applied for:Master of EngineeringSpecialty:Instrumentation Science and TechnologyDate of Submission:January, 2018Date of Oral Examination:March, 2018University:Harbin Engineering University哈尔滨工程大学学位论文原创性声明本人郑重声明:本论文的所有工作,是在导师的指导下,由作者本人独立完成的。
有关观点、方法、数据和文献的引用已在文中指出,并与参考文献相对应。
除文中已注明引用的内容外,本论文不包含任何其他个人或集体已经公开发表的作品成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律结果由本人承担。


双轴连续旋转调制捷联惯导系统初始对准技术研究双轴连续旋转调制捷联惯导系统初始对准技术研究摘要:针对双轴连续旋转调制捷联惯导系统在使用过程中存在的初始对准不准确、对准时间过长等问题,本文对双轴连续旋转调制捷联惯导系统的初始对准技术进行研究。
首先分析了传统初始对准方法的原理及其存在的局限性,在此基础上提出了一种基于旋转矩阵的新的初始对准方法,通过该方法优化了系统的初始对准精度。
同时,还对系统的初始对准时间进行了研究,提出了一种自适应算法,根据系统的实际状况进行相应的调整,实现了较快的初始对准时间。
最后通过仿真实验验证了新方法的有效性和实用性,实验结果表明,该方法具有较高的精度和较短的初始对准时间,可以为双轴连续旋转调制捷联惯导系统的应用提供有力支持。
关键词:双轴连续旋转调制捷联惯导系统;初始对准;旋转矩阵;自适应算法;仿真实验。
1. 引言惯性导航系统是一种基于惯性力学原理进行导航的技术,它具有独立性、连续性和精度高等优点,在军事、航空、航天和海洋等领域都有广泛的应用。
其中,捷联惯导系统是惯性导航系统的重要组成部分,它通过多个惯性传感器的测量和信号处理,实现位置、速度和姿态等参数的估计和更新。
双轴连续旋转调制捷联惯导系统是捷联惯导系统中的一种常见形式,它具有多个优点,如精度高、稳定性好、抗干扰能力强等。
但是,在使用双轴连续旋转调制捷联惯导系统时,必须进行初始对准,以保证系统的工作性能。
通常采用的传统初始对准方法包括水平对准、方位对准和姿态对准等。
但是,这些方法存在一些局限性,如准确度低、对准时间长等。
因此,如何改进双轴连续旋转调制捷联惯导系统的初始对准技术,成为了当前研究的热点和难点。
本文针对双轴连续旋转调制捷联惯导系统的初始对准问题,提出了一种基于旋转矩阵的新的初始对准方法,并设计了一种自适应算法,可以根据系统的实际状况进行相应的调整,从而实现较快的初始对准时间。
最后,通过仿真实验验证了新方法的有效性和实用性,为双轴连续旋转调制捷联惯导系统的应用提供有力支持。
第二章 捷联惯导系统的初试对准2.1引言惯导系统是一种自主式导航系统。
它不需要任何人为的外部信息,只要给定导航的初始条件(例如初始速度、位置等),便可根据系统中的惯性敏感元件测量的比力和角速率通过计算机实时地计算出各种导航参数。
由于“平台”是测量比力的基准,因此“平台”的初始对准就非常重要。
对于平台惯导系统,初试对准的任务就是要将平台调整在给定的导航坐标系的方向上。
若采用游动方位系统,则需要将平台调水平---称为水平对准,并将平台的方位角调至某个方位角处---称为方位对准。
对于捷联惯导系统,由于捷联矩阵T 起到了平台的作用,因此导航工作一开始就需要获得捷联矩阵T 的初始值,以便完成导航的任务。
显然捷联惯导系统的初始对准就是确定捷联矩阵的初始值。
在静基座条件下,捷联惯导系统的加速度计的输入量为---b g ,陀螺的输入量为地球自转角速率b ie ω。
因此b g 与b ie ω就成为初始对准的基准。
将陀螺与加速度计的输入引出计算机,通过计算机就可以计算出捷联矩阵T 的初始值。
由以上的分析可以看出,陀螺与加速度计的误差会导致对准误差;对准飞行器的干扰运动也是产生对准误差的重要因素。
因此滤波技术对捷联系统尤其重要。
由于初始对准的误差将会对捷联惯导系统的工作造成难以消除的影响,因此研究初始对准的误差传播方程也是非常必要的。
2.2 捷联惯导系统的基本工作原理捷联式惯性导航系统,陀螺仪和加速度计直接与载体固联,加速度计测量是载体坐标系轴向比力,只要把这个比力转换到导航坐标系上,则其它计算就与平台式惯性导航系统一样,而比力转换的关键就是要实时地进行姿态基准计算来提供数学平台,即实时更新姿态矩阵n b C ,姿态矩阵也称为捷联矩阵。
一般选择地理坐标系为导航坐标系,那么捷联矩阵n b C 也可表示为t b C , 其导航原理图如图2.1所示。
由惯导系统的工作原理可以看出,捷联式惯性导航系统有以下几个主要优点: 1.惯性敏感器便于安装、维修和更换。
车载激光捷联惯导系统的快速初始对准方法
谢波;裴听国;万彦辉
【期刊名称】《指挥控制与仿真》
【年(卷),期】2004(026)006
【摘要】首先建立了捷联惯导系统的误差模型,并对系统的误差模型进行了可观测性分析,然后针对车载激光捷联惯导系统的特点,采用卡尔曼滤波方法,对姿态误差角进行了估计,给出了方差仿真曲线.通过计算机仿真结果的分析,提出了一种快速估计方位失准角的方法,从而大大缩短了初始对准时间.仿真结果表明将该方法应用于车载激光捷联惯导系统初始对准中是有效的.
【总页数】7页(P64-69,81)
【作者】谢波;裴听国;万彦辉
【作者单位】航天时代电子仪器公司第16研究所,西安,710100;西北工业大学,西安,710072;航天时代电子仪器公司研究院,北京,100854;航天时代电子仪器公司第16研究所,西安,710100;西北工业大学,西安,710072
【正文语种】中文
【中图分类】TN961
【相关文献】
1.摇摆状态下车载捷联惯导系统初始对准方法研究 [J], 王立冬;鲁军
2.车载激光捷联惯导系统的快速初始对准方法 [J], 谢波;裴听国;万彦辉
3.车载捷联惯导系统静止条件下的初始对准方法研究 [J], 王立冬;蔡玲;鲁军
4.静基座速率偏频激光陀螺捷联惯导系统快速高精度初始对准算法 [J], 张岩;吴文启;张晓强;曹聚亮
5.车载激光捷联惯导系统的快速初始对准及误差分析 [J], 缪玲娟;田海
因版权原因,仅展示原文概要,查看原文内容请购买。
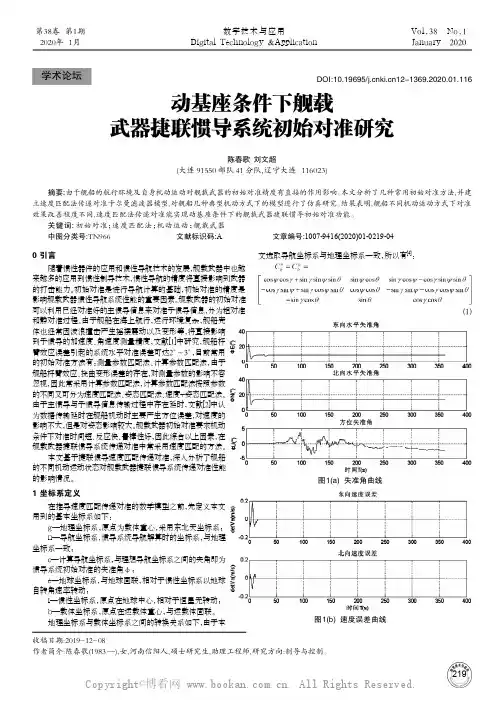
动基座条件下舰载武器捷联惯导系统初始对准研究作者:陈春歌刘文超来源:《数字技术与应用》2020年第01期摘要:由于舰船的航行环境及自身机动运动对舰载武器的初始对准精度有直接的作用影响。
本文分析了几种常用初始对准方法,并建立速度匹配法传递对准卡尔曼滤波器模型,对舰船几种典型机动方式下的模型进行了仿真研究。
结果表明,舰船不同机动运动方式下对准效果改善程度不同,速度匹配法传递对准能实现动基座条件下的舰载武器捷联惯导初始对准功能。
关键词:初始对准;速度匹配法;机动运动;舰载武器中图分类号:TN966 文献标识码:A 文章编号:1007-9416(2020)01-0219-04随着惯性器件的应用和惯性导航技术的发展,舰载武器中也越来越多的应用到惯性制导技术,惯性导航的精度将直接影响到武器的打击能力。
初始对准是进行导航计算的基础,初始对准的精度是影响舰载武器惯性导航系统性能的重要因素。
舰载武器的初始对准可以利用已经对准好的主惯导信息来对准子惯导信息,分为粗对准和静对准过程。
由于舰船在海上航行,运行环境复杂,舰船壳体也经常因波浪撞击产生摇摆震动以及变形等,将直接影响到子慣导的加速度、角速度测量精度,文献[1]中研究,舰船杆臂效应误差引起的系统水平对准误差可达2°~3°,目前常用的初始对准方法有:测量参数匹配法、计算参数匹配法,由于舰船杆臂效应、挠曲变形误差的存在,对测量参数的影响不容忽视,因此常采用计算参数匹配法,计算参数匹配法按照参数的不同又可分为速度匹配法、姿态匹配法、速度+姿态匹配法。
由于主惯导与子惯导信息传输过程中存在延时,文献[2]中认为数据传输延时在舰船机动时主要产生方位误差,对速度的影响不大,但是对姿态影响较大。
舰载武器初始对准要求机动条件下对准时间短、反应快、鲁棒性好,因此综合以上因素,在舰载武器捷联惯导系统传递对准中常采用速度匹配的方法。
本文基于捷联惯导速度匹配传递对准,深入分析了舰船的不同机动运动状态对舰载武器捷联惯导系统传递对准性能的影响情况。
2018年10月第5期现代导航·335·静基座捷联罗经初始对准方法张伟1,付泳2(1 中国电子科技集团公司第二十研究所,西安 710068;2 火箭军驻燕山电子设备厂军代室,北京 100192)摘 要:本文从分析平台罗经初始对准的原理出发,提出了静基座捷联罗经初始对准的原理并推导了便于软件编程的具体算法,通过对大方位误差角SINS非线性误差方程的简化,推导了粗略方位自对准的算法公式。
关键词:捷联惯导;静基座;罗经;初始对准中图分类号:U666 文献标识码:A 文章编号:1674-7976-(2018)05-335-05Initial Alignment Method of Strapdown Compass on Stationary BaseZHANG Wei,FU YongAbstract:In this paper, starting from the principle of initial alignment analysis platform compass,put forward the principle of initial alignment of strapdown compass on stationary base and facilitate specific software programming algorithm was deduced,based on the azimuth error Angle of SINS nonlinear error equation is simplified,self aligned roughly azimuth algorithm formula was deduced.Key words:Strapdown Inertial Navigation;Stationary Base Compass;Initial Alignment0 引言初始对准是捷联惯性导航系统进行导航的前提,捷联惯导系统的初始对准主要是提供捷联惯导的导航解算所需要的初始姿态矩阵[1]。
船用捷联惯性导航系统惯性系快速对准算法1. 前言- 引言:船舶导航系统的发展及其重要性- 目的:介绍船用捷联惯性导航系统及其快速对准算法的原理和应用- 论文结构:本文共分五个章节,分别为:- 第一章:船用捷联惯性导航系统的概述- 第二章:捷联惯性导航系统的原理- 第三章:捷联惯性导航系统的对准方法综述- 第四章:船用捷联惯性导航系统惯性系快速对准算法- 第五章:结论与展望2. 船用捷联惯性导航系统的概述- 船用导航系统的需求- 船用捷联惯性导航系统的定义- 船用捷联惯性导航系统的组成和工作原理3. 捷联惯性导航系统的原理- 加速度计和陀螺仪的原理与特点- 惯性测量单元(IMU)的工作原理和结构组成- 惯性测量误差及影响因素分析4. 捷联惯性导航系统的对准方法综述- 对准的定义及意义- 惯性导航系统的对准方法分类- 对准误差评价指标及优化方法5. 船用捷联惯性导航系统惯性系快速对准算法- 快速对准算法的基本思想- 粗对准的实现方法与流程- 精确对准的实现方法与流程- 快速对准算法的实验结果与分析6. 结论与展望- 总结本文的主要研究内容和成果- 展望捷联惯性导航系统在船舶导航领域的应用前景和发展方向。
第一章:船用捷联惯性导航系统的概述1.1 船用导航系统的需求船舶是大海上的移动基地,船舶导航系统对于航行的安全和准确至关重要。
传统的船舶导航系统主要依赖于全球定位系统(GPS)、电子海图和罗盘等设备,但是这些设备都存在着一定的局限性。
首先,GPS在某些地区或气象条件下会受到干扰或信号遮挡,影响船舶的准确导航。
其次,电子海图只能提供基本的航线规划,而无法反映船舶的实际情况。
最后,传统的罗盘系统需要受到地球磁场的影响,导致精度不高。
因此,船用捷联惯性导航系统应运而生。
捷联惯性导航系统是一种基于惯性测量原理的导航系统,通过加速度计和陀螺仪等传感器来测量物体的线性和角速度运动,从而计算出物体的位置、姿态和速度等信息。
http://www.paper.edu.cn - 1 -捷联惯导系统快速罗经初始对准方法研究1 严恭敏1,严卫生1,2,徐德民1,2 1西北工业大学航海学院,西安 (710072) 2水下信息处理与控制国家级重点实验室,西安 (710072) E-mail:yangongmin@163.com 摘 要:在分析平台罗经初始对准原理基础上,提出了捷联罗经初始对准的原理并推导了适合于软件编程的算法。将捷联罗经对准的具体实现划分为四个阶段:方位角未知情况下的水平对准、粗略方位自对准、重新水平对准和罗经方位对准,通过对大方位误差角捷联惯导非线性误差方程的简化,推导了粗略方位自对准的算法公式。如果导航计算机存储容量足够大并且计算能力足够强,根据捷联惯导系统数学平台多样性和可进行逆向姿态控制的特点,设计了一种用于缩短捷联罗经初始对准时间的具体步骤。最后,试验表明快速捷联罗经对准方案是有效的。 关键词:捷联惯导系统,罗经效应,初始对准,逆向控制 中图分类号:V249.3
1. 引言 平台惯导系统罗经初始对准过程通常可分为两步,先是水平调平,然后是方位对准。方位对准在水平调平的基础上进行,一般采样罗经方位对准方法。方位罗经对准利用的是罗经效应,也就是,在正确的平台跟踪当地地理坐标系的角速率控制指令下,如果平台存在方位轴向的偏差角,平台将产生绕东向轴的倾斜,该倾斜能由北向加速度计感测到,利用北向加速度计的输出并设计适当的控制规律,控制平台方位轴朝减小方位偏差方向转动,实现平台自动寻北。捷联惯导系统初始对准通常可分为粗对准和精对准两个阶段:在粗对准阶段,利用地球自转角速度和重力加速度作为参考量,通过惯性器件的测量输出建立粗略的导航计算坐标系;在精对准阶段,通过现代控制理论最优估计方法估计出失准角,获得准确的姿态矩阵[1,2]。
捷联惯导系统经典解析式粗对准方法难以适应晃动干扰环境,有不少文献研究了晃动基座下的初始对准问题并且也出现一些应用实例,激光陀螺和光纤陀螺的发展和不断成熟为捷联罗经的研究注入了新的活力[3-6]。从本质上说,捷联惯导系统与平台惯导系统是相同的,
前者以数学平台(利用姿态矩阵、四元数或欧拉角等数学工具)模拟后者的实体平台,描述捷联惯导系统相对于参考坐标系的空间方位。平台惯导系统中实体平台具有隔离外界干扰的作用,因而平台罗经能够实现晃动基座下的初始对准,同理,在捷联惯导系统初始对准中也可以根据平台罗经初始对准的特点,建立相应的数学平台隔离晃动影响。经典控制理论与现代最优估计方法相比,前者的优点之一是勿需精确的数学模型与噪声模型,应用经典控制理论进行罗经对准的设计方法已经非常成熟,为捷联罗经对准方案设计提供了大量的参考,然而初始对准时间长是平台罗经的一大缺点。快速初始对准是国内在捷联罗经对准方法研究中亟待解决的一个主要问题,该问题在某些西方国家已得到较好解决,例如法国iXSea公司的OctansIII型光纤陀螺罗经在动态环境下,能在3min内完成初始对准,达到0.2º×sec(L)的精度[5],成为捷联罗经研究与应用中的佼佼者,它为我们的研究和工程开发目标提供了参考。
本文从分析平台罗经初始对准的原理出发,提出了捷联罗经初始对准的原理并推导了便于软件编程的算法,通过对大方位误差角捷联惯导非线性误差方程的简化,推导了粗略方位
1 本课题得到水下信息处理与控制国家级重点实验室基金(9140C230206070C2306)的资助。 http://www.paper.edu.cn - 2 -自对准的算法公式,根据捷联惯导系统的特点,设计了缩短捷联罗经初始对准时间的具体步骤,通过试验表明快速捷联罗经对准方案是有效的。
2. 平台惯导系统罗经初始对准原理 文中选取“东-北-天”地理坐标系为导航坐标系,记为n系,“右-前-上”坐标系为捷联惯组坐标系,记为b系。
xEa+∇1/s1/R1/s
g
Kx1Kx2/RKx3/s
EVδcyω
yφ
Nεn
sfxf
~
图1 水平对准东向通道
yNa+∇1/s1/R1/s
g
Ky1Ky2/RKy3/s
NVδcxω
xφ
LiezEcosωφε−
nsfyf
~
图2 水平对准北向通道
yNa+∇1/s1/R1/s
g
Kz1Kz2/R
1/s
NVδcxω
xφ
Eεn
sfyf
~
K(s)UεLiecos
ω
czωzφ
图3 罗经方位对准 平台惯导系统的罗经初始对准原理如图1—图3所示。图中各符号的意义为:E∇和N
∇
分别为东向和北向加速度计零偏;xa和ya分别为环境干扰加速度;nsfxf~和nsfyf~分别为东向和北向加速度计输出;Eε、Nε和Uε分别为东向、北向和天向陀螺漂移;Eφ、Nφ和Uφ分别为东向、北向和天向平台误差角;cxω、cyω和czω分别为施加给平台的东向、北向和天http://www.paper.edu.cn - 3 -向控制角速率;ieω、g、R和L分别为地球自转角速率、重力加速度大小、地球半径和当地地理纬度,它们均是已知量;水平对准采用三阶调平回路,方位对准在北向二阶调平回路基础上采用四阶罗经对准回路,在罗经对准回路中可选择]cos)/[()(LωKsKsKiez4z3+=,而)4,3,2,1;,,(==jzyxiKij为对准控制律的调节参数,可根据控制要求设计,例如东向对准通道和方位对准通道调节参数典型选取方法如下: σ3x1=K
,1)/12(/222x2−+⋅=ξωσsK,)/(22x3ξσgK= (1a)
σ2z4z1==KK
,1/422z2−=sKωσ,gK/42z3σ= (1b)
北向对准通道与东向对准通道参数选取方法类似,(1)式中σ、ξ和Rgs/=ω分别为
衰减系数、阻尼比和休拉频率,可根据实际对准的精确性和快速性要求调整衰减系数和阻尼比。
3. 捷联罗经初始对准原理及算法 在捷联惯导系统中以数学平台模拟平台惯导系统中的实体平台,如图4所示,图中nbC
~
为捷联姿态矩阵,起数学平台作用,bibω~和bsff~分别是陀螺和加速度计的测量值;[]T
czcycxcωωω=ω
是施加给数学平台的控制角速率,
[]Tsincos0LLieienieωω=ω
;bsff~经nbC~变换后成为数学平台视加速度输出
[]T~~~~
nsfznsfynsfxn
sffff=f
。
bsfnbnsffCf
~~~
=
])~~~[(~~c×−−=ωCωCωCCbnniebnbibnbnb
bibω
~b
sff
~
nsff
~
cω
图4 捷联数学平台 在平台惯导罗经初始对准原理图1—图3中,一部分信号流代表实体平台的运动规律,另一部分信号流表示对准控制规律,将它们移植到捷联罗经对准时,实体平台变为数学平台,而控制规律不变。以东向对准通道为例,由图1中控制规律与图4结合,构成捷联罗经水平对准的东向通道,如图5所示,陀螺和加速度计测量误差隐含在数学平台解算之中。图1与图5中不同的是,前者以平台误差角表示,直观显示了平台误差传递规律,而后者直接以数学平台表示,便于软件算法编程和理解,其实两者在误差传递本质上还是一致的。 http://www.paper.edu.cn
- 4 -bsfnbnsffCf
~~~
=
])~~~[(~~c×−−=ωCωCωCCbnniebnbibnbnb
bibω
~b
sff
~
nsfyf
~cx
ω
1/s1/R
Kx1Kx2/RKx3/s
EVδcyω
n
sfxf
~
nsfzf
~
czω
图5 捷联罗经水平对准东向通道 从图5中可以得到控制规律 sVKfVExnsfxE/)~(1δδ−=
(2a)
)///1(32sKRKRVxxEcy++=δω (2b)
假设捷联数学平台的更新时间为sT,实际中对准回路的时间常数一般远远大于s
T,所以可
以直接用一阶差分近似代替微分,将(2)式离散化为
sEkxnsfxkEkEkTVKfVV)~(111−−−+=δδδ (3a)
)//1(32sxxEkcykTKRKRV++=
δω
(3b)
式中...3,2,1=k。同理,由图2和图4结合可构成捷联罗经水平对准的北向通道图6,由图
3和图4结合可构成捷联罗经方位对准图7,并将图6和图7中的控制规律分别离散化为(4)式和(5)式。
1/s1/RKy1Ky2/RKy3/s
NVδcxω
n
sfyf
~
bsfnbnsffCf
~~~
=
])~~~[(~~c×−−=ωCωCωCCbnniebnbibnbnb
bibω
~b
sff
~
nsfxf
~
cyωnsfzf
~
czω
图6 捷联罗经水平对准北向通道