捷联惯导系统PPT课件
- 格式:ppt
- 大小:959.50 KB
- 文档页数:20
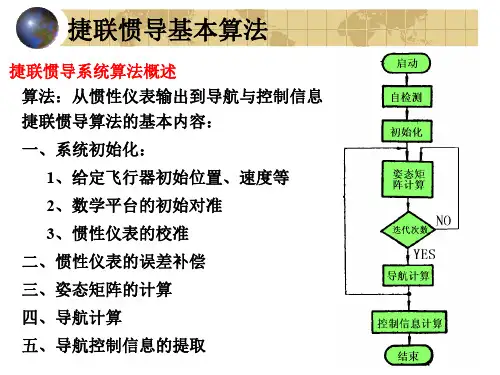

§3.9捷联式惯导系统概论一、概述“捷联”(strap down)这一术语的英文原意就是“捆绑”的意思,因此,所谓捷联系统就是将惯性测量装置的敏感器(陀螺仪与加速度计)直接捆绑在运载体上,从而可实现运动对象的自主导航目的。
平台式惯性导航系统虽然已经达到很高水平,但其造价高、使用十分昂贵。
计算机虽为数字式,但框架伺服系统一般仅采用模拟线路,所以相对来讲,可靠性差一些。
就在平台式惯性导航系统迅速发展的同时,捷联式惯性导航系统也处于研制过程中。
捷联式惯导方案是1956年提出的,当时由于没有满足捷联式系统历要求的惯性元件和计算机,因而没有被采用。
而平台式系统则不断改进、不断完善,达到了相当高的精度,满足了大多数任务的要求。
但是在可靠性和成本方面平台式系统都暴露出一系列严重问题。
与此同时计算技术取得了惊人的进展,克服了捷联式系统发展的一个主要障碍。
捷联式系统的高可靠性和低成本促使人们进—步对它进行新的技术探索。
上世纪六十年代初,美国联合飞机公司首先研制成功了第一个捷联式系统,于1969年成功地应用在阿波罗登月任务中。
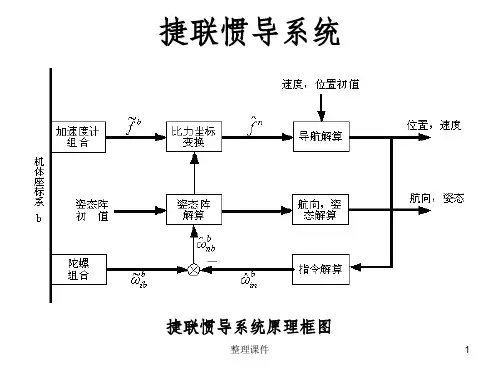
捷联式惯性导航系统是将惯性敏感器(陀螺和加速度计)直接安装在运载体上,不再需要物理实现稳定平台的惯性导航系统。
陀螺仪作为角速率传感器而不是作为角位移传感器;加速度计的输入轴不是保持在已知确定方向上,加速度计测量值是运载体瞬时运动方向的加速度值。
通过计算机内的姿态矩阵实时计算而得到一个“数学解析平台”,它同样可以起到机电结合的稳定平台所提供的在惯性空间始终保持所要求的姿态作用。
捷联式惯性导航系统有以下几个主要优点:(1) 惯性敏感器便于安装、维修和更换。
(2) 惯性敏感器可以直接给出载体坐标系轴向的线加速度、线速度、供给载体稳定控制系统。
(3) 便于将惯性敏感器重复布置,从而易在惯性敏感器的级别上实现冗余技术,这对提高系统的性能和可靠性十分有利。
(4) 由于去掉了物理实现的平台,一则消除了稳定平台稳定过程中的各种误差;二则由于不存在机电结合的平台装置,使整个系统可以做得小而轻,并易于维护。



捷联惯导系统 的关键问题捷联系统的导航任务关键问题(光学陀螺捷联惯导系统): (一)惯性器件误差的分析与补偿1.随机误差2.温度漂移误差(二)初始对准初始对准的任务是确定捷联矩阵的初始值。
初始对准的误差将会对捷联惯导系统的工作造成难以消除的影响,导致对准误差的主要因素:1.惯性器件误差;2.干扰运动。
因此,滤波技术对捷联系统尤为重要。
(三)姿态解算中的动态误差补偿高频动态环境下,必须补偿如下的整流误差:1.圆锥误差(姿态误差)2.划船误差(速度误差)3.涡卷误差(位置误差)第一部分惯性器件误差的 分析与补偿1.光学陀螺的数学模型与主要性能指标 1.1 光学陀螺的工作原理Sagnac环形干涉仪1.2 数学模型与性能指标由IEEE 标准给出的光学陀螺输入输出模型为160]101][[)/(−−+++=∆∆K D E I t N S ε (1-1)式中:为标称的标度因子,单位:(角秒/脉冲数);0S /P "t N ∆∆/为输出脉冲速率,单位:(脉冲数/秒); s /P I 为输入角速度,单位:(角秒/秒);s /"E 为环境敏感误差,主要由温度变化引起,单位:; s /"D 为漂移误差,单位:;s /"k ε为标度因子误差,单位:。
ppm 表征光学陀螺的主要性能指标有标度因数、零偏、零漂、随机游走系数,其中后三项用于描述光学陀螺输出中的漂移误差。
标度因数:陀螺仪输出量与输入角速度的比值,通常取/P′′(脉冲数/角秒)的量纲。
零偏:是当输入角速度为零时陀螺仪的输出,以规定时间内测得的输出量平均值相应的等效输入角速度表示,习惯上取(度/小时)的量纲。
h/o零漂:又称为零偏稳定性。
通常,静态情况下光学陀螺长时间稳态输出是一个平稳随机过程,即稳态输出将围绕零偏起伏和波动,表示这种起伏和波动的标准差被定义为零漂,其单位用表示。
h/o随机游走系数:由白噪声产生的随时间积累的输出误差系数,其量纲为h/o,它反映了光学陀螺输出随机噪声的强度。