5陀螺捷联惯导系统的误差参数标定方法
- 格式:pdf
- 大小:430.12 KB
- 文档页数:6

光纤陀螺捷联惯导系统级标定方法的
研究
光纤陀螺捷联惯导系统是一种高精度的导航系统,它结合了光纤陀螺和捷联惯性导航技术,可以在不依赖外部信号的情况下提供高精度的导航信息。
然而,由于光纤陀螺和惯性测量单元的误差会影响系统的精度,因此需要进行系统级标定来提高系统的性能。
系统级标定方法是指通过对整个系统进行标定,包括光纤陀螺、惯性测量单元和导航算法等,来提高系统的精度和可靠性。
目前,常用的系统级标定方法包括离线标定和在线标定两种。
离线标定是指在系统安装和调试完成后,对系统进行标定。
离线标定通常需要使用高精度的标定设备,如转台、全站仪等,对系统进行精确测量和标定。
离线标定的优点是精度高、稳定性好,但需要专业的设备和技术人员,成本较高。
在线标定是指在系统运行过程中,通过对系统的输出进行实时监测和修正,来提高系统的精度和可靠性。
在线标定通常需要使用一些先进的算法和技术,如卡尔曼滤波、粒子滤波等,对系统的输出进行实时修正。
在线标定的优点是成本低、易于实现,但精度和稳定性相对较差。
总之,系统级标定是提高光纤陀螺捷联惯导系统精度和可靠性的重要手段。
在实际应用中,需要根据具体情况选择合适的标定方法,以提高系统的性能和可靠性。
IMU标定方法和标定流程受各种因素影响,微机械IMU放五一定时间后,其误差参数和惯性元件参数会发生变化,不能满足导航、制导的精度要求,因此必须定期对其相应参数重新进行标定.捷联惯测组合(SIMU)技术成熟、精度适中、可靠性高、成本低,被广泛应用于航空、航天、航海等领域,对其标定方法的研究是惯性技术领域的重要内容。
通常通过对捷联惯测组合的标定,分离出其误差系数,并用捷联惯测组合的测量模型对其输出进行补偿,提高惯性导航的精度。
因此,误差系数的标定精度严重影响着惯性导航的精度。
近年来研究出了许多种捷联惯测组合的标定方法,但其中大多数都需要进行位置标定和速率标定.有的文献提出了一种高精度的“24位置+速率”标定方法,还有一种利用外部信息标定陀螺参数的方法,一级一种基于多元回归的捷联惯测组合标定方法。
传统的“位置+速率”标定方法需要精确的北向基准和很高的定位精度或调平精度。
这些要求要靠高精度的寻北仪器和水平测量仪器才能实现。
传统标定方法所需要的标定时间长,而捷联惯测组合误差系数的特性与通电时间相关,因此通电时间过长所标定出的结果与导弹实际飞行时的误差系数的残差较大,必然带来较大的导航误差。
而且过长的标定时间也影响着惯测组合生产厂家和用户的工作效率.结合参考文献内容我们采用一种基于单轴速率转台的捷联惯测组合的标定方法,研究在无北向基准及精确调平的条件下,快速标定出捷联惯测组合全部误差系数的方法。
1.基于单轴速率转台的标定原理基于单轴速率转台的捷联惯测组合标定方法的基本原理为:将捷联惯测组合放置在单轴速率转台上,在任意位置惯测组合的3个轴分别向上、向下及转动180度后,各进行一次静态数据采集。
之后转台匀速旋转一圈。
重力加速度g、地球自转角速度w及转台匀速旋转一圈的时间为已知量,结合捷联惯测组合的测量模型,经过适当的数学变换,分离出捷联惯测组合的误差系数。
2 .误差系数的分离算法2.1 捷联惯测组合的测量模型及姿态转换加速度通道的测量模型:其中Nax、Nay和Naz分别为3个加速度计单位时间内输出的脉冲数;Ax、Ay,Az分别为3个方向的视加速度;K0x、K0y和K0z分别为3个加速度计偏值;K1x、K1y和K1z分别为3个加速度计输出的脉冲当量;Kyx、Kzx、Kxy、Kzy、Kxz和Kyz为加速度计的安装误差系数。

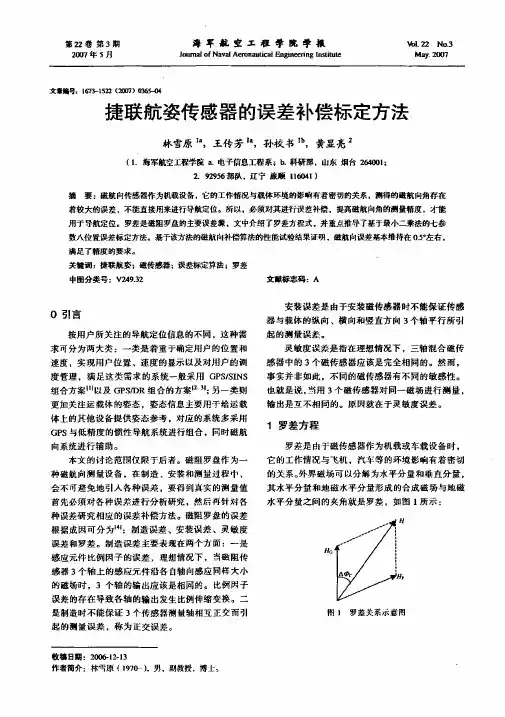
一、惯性测量单元标定技术的重要性惯性测量单元的核心器件是陀螺和加速度计,陀螺敏感载体的角运动,加速度计敏感载体的线运动,惯性导航系统的精度很大程度上取决于陀螺和加速度计的精度。
对陀螺来说,不仅要测出微小的角位移变化,给出满足分辨率要求的响应信号,而且要将陀螺仪的漂移误差限制在尽量小的范围内。
加速度计同样要有很高的分辨率,要能清晰、精确地反映出从非常小到非常大的加速度,并给出与之相应的信号,同时还必须有尽可能小的、稳定的零位偏置。
目前,提高惯性器件和惯导系统的精度主要有两条途径:(1) 改进器件的结构及工艺,探索新型的惯性器件。
(2) 对惯性测量单元进行标定,建立误差模型,通过误差标定补偿来提高器件的实际使用精度和系统的导航精度。
仅靠改进设计来提高惯性器件精度在加工、制造、装配及调试中遇到的困难越来越多,成本也越来越高,因此是一项长周期,高风险的技术,而且只能做到有限的精度提升;而后者则可通过对惯性测量单元进行标定后求得软件补偿的参数,从而对导航测量单元的输出进行补偿以提高系统导航精度。
通过对惯性测量单元标定提高惯性器件的使用精度的技术途径大大降低惯导系统的成本,而且这种方法也使得惯性器件的设计思想由原来片面追求器件的绝对精度转为重点保证其性能稳定并减少随机误差,因此惯性测量单元的标定及补偿技术成为了提高惯导系统精度的关键技术之一。
二、惯性测量单元的元件标定随着惯性技术和光学陀螺的发展,光纤陀螺越来越多的被使用在惯性测量单元中。
相比于其他类型的陀螺,光纤陀螺内部没有运动部件,因此具有寿命长,可靠性好,重量轻等优点。
同时光纤陀螺的启动时间短,对机械环境的适应性好,动态范围宽。
但是光纤陀螺易受环境温度影响,构成光纤陀螺的主要器件如光纤线圈、集成光学器件、光源、耦合器等对温度较为敏感,所以当工作环境温度发生变化时,在陀螺的输出信号中将产生非互易相位误差,由温度变化造成的非互异性误差是导致光纤陀螺零位漂移和刻度系数不稳定的主要原因。
光纤陀螺捷联惯导多位置系统级标定方法标定技术是捷联惯导系统领域的一项关键技术,本质上是一种误差补偿技术。
按照观测量的不同可以分为分立式标定和系统级标定,由于前者在研究方法上比后者更加趋于成熟,因此常常采用分立式标定来确定惯组的数学模型。
分立式标定依靠高精度三轴转台来进行一系列实验来得出陀螺仪与加速计模型中的各项参数,实验步骤多、标定时间长,且标定精度受转台限制无法进一步提升。
为使标定更有效率,越来越多的学者转向系统级标定方法的研究。
本文介绍了两种系统级标定的一般方法,分别是滤波法和解析法,代表了系统级标定的两种不同思路。
相较于解析法,运用滤波的方法来求解标定模型不仅原理简单,而且不涉及复杂的数学推导,精度高,标定路径编排较少。
因此本课题以卡尔曼滤波为基础来进行系统级标定方案的设计。
直接将惯组的待标定参数扩充到状态量中,得到的是一个30维的大系统。
为降低试验设计难度,提高滤波精度,本文对其进行降维处理。
通过引入了一种基于行初等变换的可观测性分析方法,运用该方法可以直观地识别出状态方程中哪些状态独立可观测、哪些状态不可观测、哪些状态非独立可观测。
基于可观测性的分析结果,在原有的状态方程中,保留独立可观测量,剔除不可观测量、合并非独立可观测量,从而达到简化系统方程,降低系统维数的目的。
最后依据降维后的系统,设计出了6个静态位置与6个单轴旋转位置,并对此进行了仿真试验,仿真试验结果表明该方案具有理论可行性。
之后进行了实际转台试验,将其与分立式标定结果进行比较。
通过对比四组五级海况实验的姿态变化曲线,可以清晰的看出系统级方案的补偿效果整体上优于分立式标定,故而这种基于降维后的系统级标定滤波方案具有一定的工程实践价值。
专利名称:一种捷联MEMS陀螺动态误差标定方法专利类型:发明专利
发明人:房建成,李建利,张霄,孙宏伟,张海鹏
申请号:CN200710064319.0
申请日:20070312
公开号:CN101029833A
公开日:
20070905
专利内容由知识产权出版社提供
摘要:一种捷联MEMS陀螺动态误差标定方法,可辨识出捷联MEMS陀螺全部动态误差系数,其方法为基于MEMS陀螺误差机理,建立完备动态误差模型,利用三轴速率转台设计三轴速率试验,标定出捷联MEMS陀螺零偏、标度因数、安装误差系数以及陀螺与角速度平方有关项误差系数;采用三耦合方位动态试验,标定出陀螺三个角速度耦合二次项误差系数;利用三轴速率转台的速率功能,设置三轴初始角,将三轴转台中框Y轴以及外框Z轴同时输入相同匀角速度Ω,激发出包括角加速度误差在内的动态误差项,从而标定出陀螺与角加速度有关项误差系数。
本发明只需利用三轴速率转台即可精确标定出捷联MEMS陀螺所有动态误差系数,误差辨识精度高,可为传统机械式以及光纤等陀螺提供参考。
申请人:北京航空航天大学
地址:100083 北京市海淀区学院路37号
国籍:CN
代理机构:北京科迪生专利代理有限责任公司
更多信息请下载全文后查看。
无陀螺捷联惯导系统的安装误差辨识方法
无陀螺捷联惯导系统的安装误差辨识方法
根据无陀螺捷联惯导系统(GFSINS)的工作原理,推导了理想条件下和有加速度计安装误差条件下的角速度解算方程;推导了加速度计的安装位置误差所产生的加速度计的输出误差;在静基座条件下,通过旋转惯性测量单元坐标轴的方法改变其放置位置,建立了加速度计安装位置误差的辨识公式;数字仿真结果表明.所采用的加速度计安装误差的辨识方法有效,对辨识得到的安装误差进行补偿可以显著地提高角速度的解算精度.
作者:吴俊伟李绵伟王小旭金春竹WU Junwei LI Mianwei WANG Xiaoxu JIN Chunzhu 作者单位:哈尔滨工程大学,自动化学院,黑龙江,哈尔滨,150001 刊名:测试技术学报ISTIC英文刊名:JOURNAL OF TEST AND MEASUREMENT TECHNOLOGY 年,卷(期):2008 22(5) 分类号:V249.32 关键词:无陀螺捷联惯导系统惯性单元安装误差加速度计参数辨识。
捷联惯导系统现场标定方法高伟;叶攀;许伟通【摘要】陀螺漂移会对捷联惯性导航系统的导航定位误差产生直接的影响,所以需要用实验的方法标定出陀螺漂移,并进行补偿;陀螺漂移随时间和环境变化,因此采用实验室标定方法会降低系统的精度;文章提出一种基于卡尔曼滤波技术的现场标定方法,给出了现场标定时系统的状态方程,分别推导了采用速度、速度加姿态为观测信息时的量测方程;利用奇异值可观测度分析方法比较机动状态不同,观测信息不同的五种现场标定方案的陀螺漂移的可观测度,从而确定了两种最优现场标定方案,即在以速度为外部观测量的情况下,使载体处于“S”型机动状态和在载体静止的情况下,速度加姿态为观测信息;通过仿真实验验证了这两种标定方案可以有效提高现场标定的精度.【期刊名称】《计算机测量与控制》【年(卷),期】2016(024)007【总页数】4页(P301-303,310)【关键词】捷联惯导系统;陀螺漂移;现场标定;卡尔曼滤波;奇异值【作者】高伟;叶攀;许伟通【作者单位】哈尔滨工程大学自动化学院,哈尔滨150001;哈尔滨工程大学自动化学院,哈尔滨150001;哈尔滨工程大学自动化学院,哈尔滨150001【正文语种】中文【中图分类】U666.1在捷联惯导系统中,惯性测量组件直接安装在载体上,所以惯性测量组件的误差对捷联惯导系统的性能影响很大,特别是陀螺漂移对导航定位误差的影响按时间的三次方增长[1]。
必须预先在实验室对陀螺漂移进行标定,然后在使用时加以补偿。
由于实验室标定存在一定误差,并且随着时间和环境的变化,陀螺漂移存在变化,即一定的偏移,我们称为陀螺的逐次启动误差,所以对于高精度的捷联惯导系统在每次启动时,需要在初始对准的过程中进行现场标定。
本文介绍了基于卡尔曼滤波技术的现场标定方法,提出了两种提高陀螺漂移可观测度的有效措施。
1.1 系统的状态方程二通道10个状态量的系统状态方程如下[2]:其中,X=[δVx δVy φx φy φz ▽x ▽y εx εy εz]T,δVx、δVy分为东向和北向速度误差;φx、φy、φz分别为x、y、z轴的平台误差角;▽x、▽y分别为x、y轴加速度计零偏;εx、εy、εz分别为x、y、z轴的陀螺漂移。
激光陀螺捷联惯性导航系统的误差参数标定
杨孟兴;徐兵华
【期刊名称】《中国惯性技术学报》
【年(卷),期】2008(016)003
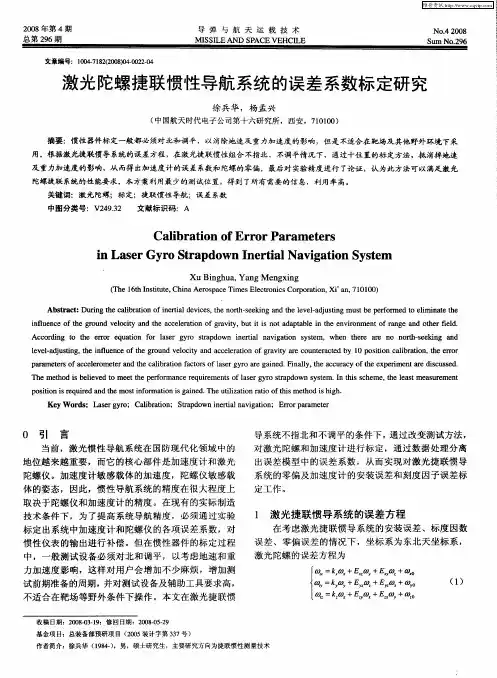
【摘要】惯性器件标定一般都必须对北和调平,以消除地速及重力加速度的影响,但是不适合在靶场及其它野战环境下.根据激光捷联惯导系统的误差方程,在激光捷联惯性组合不水平指北情况下,通过12位置的标定方法,抵消地速及重力加速度的影响,从而得出加速度计的误差参数和激光陀螺的常值漂移;然后通过单轴转台,标定出陀螺的安装误差和标度因数;最后分别在引北调平和在不水平指北的12位置下对激光捷联组合进行标定,并对实验精度进行对比,两者误差比较小,认为此方法可以满足激光陀螺捷联系统的标定要求.本方案利用最少的测试位置,得到了所有需要的信息,利用率高.
【总页数】4页(P306-309)
【作者】杨孟兴;徐兵华
【作者单位】中国航天时代电子公司,第十六研究所,西安,710100;中国航天时代电子公司,第十六研究所,西安,710100
【正文语种】中文
【中图分类】U666.1
【相关文献】
1.激光陀螺捷联惯性导航系统的误差系数标定研究 [J], 徐兵华;杨孟兴
2.激光陀螺捷联惯性导航系统解析对准误差特性分析 [J], 陈河;张志利;周召发;刘朋朋;赵晓枫
3.激光陀螺捷联惯性导航系统误差分析及仿真计算 [J], 吉翠萍;陈勇;雷宏杰;韩宗虎;陈林峰
4.激光陀螺捷联惯性导航系统中惯性器件误差补偿技术 [J], 熊智;刘建业;林雪原;曾庆化
5.激光陀螺捷联惯性导航系统IMU误差标定 [J], 王建中
因版权原因,仅展示原文概要,查看原文内容请购买。