单输入单输出系统的时域分析
- 格式:ppt
- 大小:2.95 MB
- 文档页数:146



系统时域分析实验报告系统时域分析实验报告一、引言时域分析是电子工程中的重要内容之一,它通过对系统在时间上的响应进行观察和分析,可以帮助我们了解系统的动态特性。
本实验旨在通过对不同系统的时域分析,探讨系统的稳定性、阶数、零极点等特性。
二、实验目的1. 了解时域分析的基本概念和方法;2. 掌握系统的稳定性判断方法;3. 学习如何通过时域分析确定系统的阶数;4. 理解系统的零极点对系统响应的影响。
三、实验原理1. 系统的稳定性判断系统的稳定性是指当输入信号有限时,系统输出是否有界。
常用的判断方法有零极点判断法和频率响应判断法。
2. 系统的阶数确定系统的阶数是指系统传递函数中最高次幂的阶数。
通过观察系统的单位阶跃响应或单位冲激响应,可以确定系统的阶数。
3. 零极点对系统响应的影响系统的零点和极点决定了系统的传递特性。
零点是使系统增益为零的点,极点是使系统增益无穷大的点。
零点和极点的位置和数量决定了系统的稳定性、阶数和频率响应。
四、实验步骤1. 确定实验所用系统的传递函数;2. 绘制系统的单位阶跃响应曲线;3. 通过观察单位阶跃响应曲线,判断系统的稳定性;4. 根据单位阶跃响应曲线的特点,确定系统的阶数;5. 分析系统的零极点位置和数量对系统响应的影响。
五、实验结果与分析以某一系统为例,实验得到其单位阶跃响应曲线如下图所示。
[插入实验结果图]通过观察单位阶跃响应曲线,我们可以看到系统的输出在一定时间后趋于稳定,且没有出现振荡现象。
因此,可以判断该系统是稳定的。
根据单位阶跃响应曲线的特点,我们可以看到系统的输出在一定时间后达到了稳态值,并且没有超过该稳态值。
根据阶跃响应曲线的形状,我们可以判断该系统的阶数为一阶。
通过对系统的传递函数进行分析,我们可以确定系统的零点和极点的位置和数量。
进一步分析可以得出,系统的零点和极点的位置和数量对系统的稳定性、阶数和频率响应都有重要影响。
六、实验总结通过本次实验,我们了解了时域分析的基本概念和方法,掌握了系统的稳定性判断方法和阶数确定方法。
第3章 单输入单输出控制系统的分析建立系统数学模型的主要目的是为了对系统性能进行分析与设计。
对控制系统的分析有稳态性能和动态性能分析,如系统的稳定性,稳态误差,动态响应性能参数等。
其分析方法主要有时域法和频域法两种。
时域分析法是直接在时间域内计算系统的时间响应、分析系统的稳定性、能控和能观性、动态性能等,这种分析方法的结果比较直观。
频域分析法是在系统受到频率为ω的正弦信号激励时,分析系统输出幅值和相位与输入激励之间的关系,进而得到系统的性能特性。
MATLAB 控制系统工具箱(Control System Toolbox )对控制系统,尤其是对线性时不变(Linear Time Invariant,简称LTI )系统的建模、分析和设计提供了一个完整的解决方案,也避免了繁杂的编程工作,是线性控制系统分析和设计的高效率的工具。
3.1单输入单输出(SISO )控制系统的模型及其转换在得到控制系统各个环节的MATLAB 表达之后,通常需要进行串联、并联、反馈连接等处理方式,将比较复杂的系统化成简单的系统,再进行分析和设计。
在控制系统工具箱中提供了一些函数来支持系统的连接。
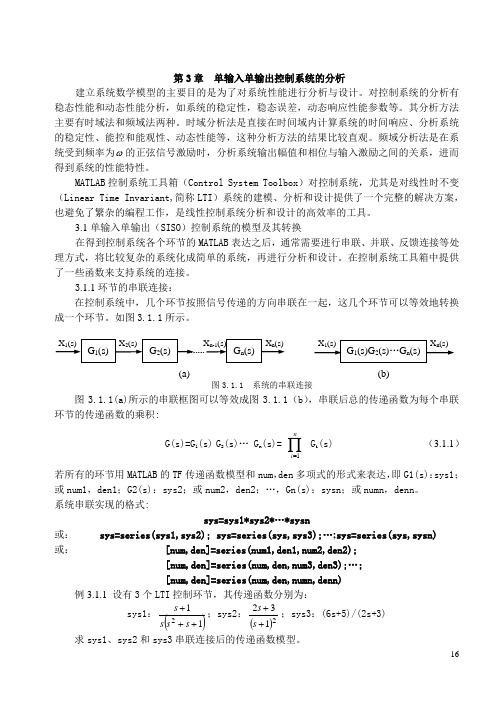
3.1.1环节的串联连接:在控制系统中,几个环节按照信号传递的方向串联在一起,这几个环节可以等效地转换成一个环节。
如图3.1.1所示。
图3.1.1(a)所示的串联框图可以等效成图3.1.1(b ),串联后总的传递函数为每个串联环节的传递函数的乘积:G(s)=G 1(s) G 2(s)… G n (s)= ∏=n i 1G i (s) (3.1.1)若所有的环节用MATLAB 的TF 传递函数模型和num ,den 多项式的形式来表达,即G1(s):sys1;或num1,den1;G2(s):sys2;或num2,den2;…,Gn(s):sysn ;或numn ,denn 。
系统串联实现的格式:sys=sys1*sys2*…*sysn或: sys=series(sys1,sys2); sys=series(sys,sys3);…;sys=series(sys,sysn) 或: [num,den]=series(num1,den1,num2,den2);[num,den]=series(num,den,num3,den3);…;[num,den]=series(num,den,numn,denn)例3.1.1 设有3个LTI 控制环节,其传递函数分别为:sys1:()112+++s s s s ;sys2:()2132++s s ;sys3:(6s+5)/(2s+3)求sys1、sys2和sys3串联连接后的传递函数模型。

滤波器的时域和频域分析方法滤波器是信号处理中常用的工具,它可以对信号进行去噪、降低干扰等操作。
在使用滤波器进行信号处理时,我们需要了解滤波器的时域和频域分析方法,以便更好地理解和优化滤波器的性能。
I. 时域分析方法时域分析是对滤波器在时间上的响应进行研究的方法。
下面介绍几种常用的时域分析方法。
1. 输入-输出时域分析输入-输出时域分析是通过给滤波器输入一个已知的测试信号,观察输出信号的变化来研究滤波器的特性。
常用的测试信号包括脉冲信号、正弦信号等。
通过分析输出信号的振幅、相位和波形等参数,可以得到滤波器的时域响应。
2. 单位冲激响应单位冲激响应是指在滤波器输入端输入单位冲激信号时,滤波器的输出响应。
单位冲激响应可以通过计算滤波器的冲激响应函数得到,也可以通过实验测量得到。
单位冲激响应对于分析和设计滤波器非常重要,可以用于计算滤波器的频率响应等。
II. 频域分析方法频域分析是通过将信号从时域转换到频域,研究信号在频率上的特性。
下面介绍几种常用的频域分析方法。
1. 傅里叶变换傅里叶变换是将信号从时域转换到频域的一种数学工具。
通过对信号进行傅里叶变换,我们可以得到信号的频谱信息,即信号在不同频率上的幅度和相位。
对于滤波器的频域分析,傅里叶变换可以帮助我们理解滤波器对不同频率成分的响应。
2. 频率响应频率响应是指滤波器在频域上对不同频率成分的响应情况。
我们通常使用幅度响应和相位响应来描述滤波器的频率特性。
幅度响应表示滤波器对不同频率成分的衰减或增益程度,相位响应表示滤波器对不同频率成分的相位延迟。
通过分析滤波器的频率响应,可以判断滤波器的通带、阻带和截止频率等参数。
III. 综合分析方法在实际应用中,时域和频域分析方法常常相互结合,进行综合分析。
通过同时分析滤波器的时域和频域特性,我们可以更全面地了解滤波器的性能和特点。
综上所述,滤波器的时域和频域分析方法是对滤波器进行性能评估和优化的重要手段。
通过时域分析方法,我们可以了解滤波器在时间上的响应特性;通过频域分析方法,我们可以了解滤波器在不同频率上的响应情况。
典型系统的时域响应与稳定性分析1. 时域响应分析时域响应指的是系统在时间上的响应特性。
时间域分析主要是利用微分方程分析系统的时域响应。
对于一个线性时不变系统(LTI)来说,可以通过拉普拉斯变换来得到系统的微分方程和传递函数,然后通过求解微分方程或者使用传递函数的极点和零点分析系统的时域响应。
常见的系统时域响应包括阶跃响应、脉冲响应和正弦响应。
这里以阶跃响应为例:阶跃响应可以用系统的传递函数 H(s) 通过拉普拉斯逆变换来求得:h(t) = L^-1[H(s)]其中,L^-1表示拉普拉斯逆变换。
如果系统的传递函数可以表示为有理函数的形式,可以通过部分分式分解和拉普拉斯逆变换将传递函数分解为简单的分式形式,例如:H(s) = K / (s+a)(s+b)上述传递函数的分解形式可以根据不同的分母极点对系统的时域响应进行分析。
例如,对于第一种分解形式,系统的时域响应可以表示为:h(t) = K1e^(-at) - K2e^(-bt)其中,K1和K2是待定系数,可以根据初值条件求解。
根据这个时域响应可以得到系统的稳定性分析结论:当a和b的实部均小于零时,系统是稳定的;当a和b的实部均大于零时,系统是不稳定的;当a和b的实部均等于零时,系统是临界稳定的。
2. 稳定性分析稳定性分析是对系统的稳定性进行判断和评价的过程。
系统的稳定性取决于时域响应的长期行为,可以通过系统的极点和零点的位置来进行判断。
对于一个单输入单输出(SISO)的线性时不变系统(LTI),系统的稳定性可以根据系统的传递函数 H(s) 的极点位置进行判断。
如果所有的极点都位于s平面的左半平面,也就是实部都小于零,则系统是稳定的。
如果存在一个或多个极点位于s平面的右半平面,则系统是不稳定的。
如果极点都位于s平面的虚轴上,则系统是临界稳定的。
稳定性分析是控制系统设计过程中必不可少的一步,它能够帮助控制工程师预测系统的行为并避免不稳定的结果。
在实际应用中,稳定性分析可以应用于飞行控制系统、机器人控制系统、电力系统等领域,为实际系统的设计和控制提供基础支持。
自动控制理论第四版课后习题详细解答答案夏德钤翁贻方版第一章引论1.1 概述1.1.1 自动控制理论的基本内容自动控制理论是研究如何使一个控制系统尽量满足某种性能要求的一门学科。
它的基本内容包括控制系统的建模、分析与综合。
1.1.2 自动控制理论的应用领域自动控制理论广泛应用于航空航天、工业制造、交通运输、生物医学、农业水利等领域,其中航空航天和工业制造是自动控制理论最重要的应用领域之一。
1.2 控制系统的基本模型1.2.1 控制系统的一般模型控制系统的一般模型可表示为:$G(s) = \\frac{Y(s)}{X(s)} = \\frac{N(s)}{D(s)}$其中,G(G)是控制系统的传递函数,G(G)是输出信号,G(G)是输入信号,G(G)是控制系统的分子传递函数,G(G)是控制系统的分母传递函数。
1.2.2 控制系统的框图表示控制系统可以通过框图进行表示,常用的框图有信号流图、函数框图、传递函数框图等。
1.2.3 控制系统的数学模型控制系统的数学模型可以是微分方程、差分方程、状态空间方程等形式。
1.3 控制系统的分析与综合1.3.1 控制系统的时域分析方法控制系统的时域分析方法主要包括步跃响应法、脉冲响应法、频率响应法等。
1.3.2 控制系统的频域分析方法控制系统的频域分析方法主要包括伯德图法、封闭环伯德图法、根轨迹法等。
1.3.3 控制系统的综合方法控制系统的综合方法主要包括根轨迹法、频率响应法、状态空间法等。
1.4 控制系统的稳定性分析在控制系统中,稳定性是一个重要的性能指标。
稳定性分析主要是指判定一个控制系统是否稳定,并对稳定系统的稳定性能指标进行评估。
1.4.1 控制系统的稳定性定义控制系统的稳定性定义是指控制系统中任意输入对应的输出都是有界的。
1.4.2 控制系统的稳定性判据常用的控制系统稳定性判据包括极点判据、根轨迹判据、Nyquist判据等。
1.4.3 控制系统的稳定性分析方法控制系统的稳定性分析方法主要包括极点分析法、根轨迹法、频率响应法等。