5.1简谐振动
- 格式:doc
- 大小:222.00 KB
- 文档页数:11

简谐振动的特性与公式简谐振动是指物体在回复力的作用下,以一个固定的角频率在平衡位置周围做往复运动的现象。
它是力学中的重要概念,广泛应用于物理学、工程学以及其他领域。
本文将探讨简谐振动的特性以及相关的公式。
一、简谐振动的特性1. 平衡位置与位移:简谐振动的平衡位置是物体在无外力作用下所处的位置,位移是物体相对于平衡位置的偏移量。
在简谐振动中,物体在平衡位置附近做往复运动,位移大小与方向随时间变化。
位移可以用矢量表示,方向与偏离平衡位置的方向相反。
2. 振动的周期与频率:简谐振动的周期是完成一次完整往复运动所需的时间,用符号T表示。
频率是单位时间内完成的往复运动次数,用符号f表示。
周期和频率之间存在以下关系:f=1/T。
3. 振幅与最大速度:简谐振动的振幅是位移的最大值,表示振动的幅度大小。
最大速度是物体在振动过程中达到的最大速度,与振幅相关。
振幅越大,最大速度越大。
4. 角频率与周期:角频率是简谐振动中角度随时间变化的快慢程度,用符号ω表示。
角频率与周期之间存在以下关系:ω=2πf=2π/T。
二、简谐振动的公式1. 位移与时间的关系:简谐振动的位移随时间的变化可以用正弦函数来描述。
当物体从平衡位置出发向一个方向运动时,位移的函数关系可以表示为:x(t) = A * sin(ωt),其中x(t)为时间t时刻的位移,A为振幅,ω为角频率。
2. 速度与时间的关系:简谐振动的速度随时间的变化也可以用正弦函数来描述。
速度的函数关系可以表示为:v(t) = A * ω * cos(ωt),其中v(t)为时间t时刻的速度。
3. 加速度与时间的关系:简谐振动的加速度随时间的变化同样可以用正弦函数来描述。
加速度的函数关系可以表示为:a(t) = -A * ω^2 *sin(ωt),其中a(t)为时间t时刻的加速度。
以上公式是简谐振动中最基本的公式,通过它们可以计算出简谐振动过程中任意时刻的位移、速度和加速度。
三、应用举例简谐振动的特性与公式在实际应用中有着广泛的应用。

简答题5.1 什么是简谐运动?说明下列运动是否是简谐运动?(1)活塞的往复运动;(2)皮球在硬地上的跳动;(3)一小球在半径很大的光滑凹球面底部的来回滑动,且经过的弧线很短;(4)锥摆的运动。
答:质点的简谐振动一定要有平衡位置,以平衡位置作为坐标原点,如果以x 表示质点偏离平衡位置的位移,质点所受合外力一定具有F kx =-的形式。
(1)活塞的往复运动不是简谐运动,因为活塞受力的方向和它的位移是同一方向,任一时刻所受的合外力不具有F kx =-的形式,所以活塞的往复运动是简谐运动。
(2)皮球在硬地上的跳动不是简谐运动,因为忽略空气阻力,皮球在上升和下落阶段,始终受到竖直向下的重力的作用,任一时刻所受的合外力不具有F kx =-的形式,所以皮球的运动不是简谐运动。
(3)一小球在半径很大的光滑凹球面底部的来回滑动,且经过的弧线很短是简谐运动。
符合简谐运动的定义。
(4)锥摆的运动不是简谐运动,此时锥摆受到重力和绳的拉力的作用,这两个力的合力的大小为恒量,而方向在不断的改变,任一时刻所受的合外力不具有F kx =-的形式,所以锥摆的运动不是简谐运动。
5.2(1)试述相位和初相的意义,如何确定初相?(2)在简谐振动表达式)cos(ϕω+=t A x 中,t = 0是质点开始运动的时刻,还是开始观察的时刻?初相20/,πϕ=各表示从什么位置开始运动?答:1)相位是决定谐振动运动状态的物理量,初相是确定振动物体初始时刻运动状态的物理量。
由初始条件可以确定初相。
2)在简谐振动表达式)cos(ϕω+=t A x 中,t = 0是质点开始计时时刻的运动状态,是开始观察的时刻。
初相0ϕ=是物体处于正最大位移处开始运动,初相/2ϕπ=是物体处于平衡位置且向初相x 轴负向开始运动。
5.3 一质点沿x 轴按)cos(ϕω+=t A x 作简谐振动,其振幅为A ,角频率为ω,今在下述情况下开始计时,试分别求振动的初相:(1)质点在x = +A 处;(2)质点在平衡位置处、且向正方向运动;(3)质点在平衡位置处、且向负方向运动;(4)质点在x =A /2处、且向正方向运动;(5)质点的速度为零而加速度为正值。
简谐振动的基本概念与公式简谐振动是物理学中的一个重要概念,它广泛应用于多个领域,如机械振动、电磁振动等。
本文将介绍简谐振动的基本概念,探讨简谐振动的公式,并阐述其在实际应用中的重要性。
一、简谐振动的概念简谐振动是一种基本振动形式,它的特点是系统在平衡位置附近以一定频率围绕平衡位置作一定幅度的振动。
简谐振动可以通过一定的数学模型进行描述和分析。
假设一个质点在某个固定轴上振动,当它距离平衡位置的位移与时间的关系满足正弦函数或余弦函数规律时,就称这种振动为简谐振动。
简谐振动的特点在于系统的振动是周期性的,即经过一段时间后,质点会回到初始状态并重复振动。
这个时间段称为振动的周期,用符号T表示。
另外,简谐振动的频率f是指单位时间内振动的次数,其倒数与周期T之间存在关系:f=1/T。
频率的单位是赫兹(Hz),周期的单位是秒(s)。
二、简谐振动的公式对于简谐振动,可以通过数学公式来描述其位移、速度和加速度与时间的关系。
1. 位移的公式简谐振动的位移公式一般采用正弦函数或余弦函数形式表示。
对于给定的简谐振动,其位移y与时间t之间的关系可以表示为:y = A * sin(ωt + φ)其中,A为振幅,表示质点离开平衡位置的最大位移;ω为角速度,表征振动的频率;φ为初相位,反映振动的起始状态。
2. 速度的公式简谐振动的速度与位移之间存在一定的关系。
对于给定的简谐振动,其速度v与时间t之间的关系可以表示为:v = Aω * cos(ωt + φ)3. 加速度的公式简谐振动的加速度与位移之间也存在特定的数学关系。
对于给定的简谐振动,其加速度a与时间t之间的关系可以表示为:a = -Aω² * sin(ωt + φ)其中,负号表示加速度的方向与位移相反。
三、简谐振动的应用简谐振动在多个领域都有重要的应用。
以下列举了几个常见的实际应用场景:1. 机械振动简谐振动广泛应用于机械工程中,如弹簧振子、摆锤等。
利用简谐振动的特性,可以设计和控制机械系统的振动,改善其运行稳定性,提高效率和精度。

简谐振动理论概述简谐振动是物理学中一种基本的振动形式,广泛应用于机械、电子、光学等领域。
本文将概述简谐振动的理论基础及相关特性。
一、简谐振动的定义与基本特性简谐振动是指在恢复力作用下,物体围绕平衡位置做往复振动的一种运动形式。
它具有以下几个基本特性:1. 平衡位置:简谐振动的平衡位置是物体受到恢复力时的位置,也是物体运动的稳定状态。
2. 往复运动:物体在简谐振动中以一定的频率围绕平衡位置做往复运动,即向远离平衡位置的方向运动,然后再回到平衡位置。
3. 振幅:振幅是简谐振动的最大偏离平衡位置的距离,它决定了振动的强度。
4. 周期与频率:简谐振动的周期是物体完成一次完整振动所需的时间,频率是单位时间内振动的次数。
它们之间存在着倒数关系,即周期等于频率的倒数。
二、简谐振动的数学表示简谐振动可以通过数学函数来描述。
其中,最常用的是正弦函数和余弦函数。
简谐振动的数学表示形式如下:x(t) = A * sin(ωt + φ)其中,x(t)表示时间t时物体离平衡位置的距离;A表示振幅;ω表示角频率,与振动的周期和频率有关;φ表示相位,描述振动的初始时刻。
三、简谐振动的力学模型简谐振动的力学模型通常可以使用弹簧振子来描述。
弹簧振子由弹簧和质点组成,在无阻尼情况下可以实现简谐振动。
根据胡克定律,弹簧振子的恢复力与质点的位移成正比,可以通过以下公式表示:F = -kx其中,F表示恢复力的大小;k表示弹簧的劲度系数;x表示质点相对平衡位置的位移。
四、简谐振动的能量在简谐振动中,系统的总能量保持不变,由动能和势能组成。
质点的动能和势能在振动过程中相互转换。
动能和势能可以通过以下公式表示:动能 K = 1/2 * m * v^2势能 U = 1/2 * k * x^2其中,m表示质点的质量;v表示质点的速度;k表示弹簧的劲度系数;x表示质点相对平衡位置的位移。
五、简谐振动的应用简谐振动在各个领域都有重要的应用。
以下是一些常见的应用场景:1. 机械振动:简谐振动广泛应用于机械系统中,如弹簧振子、钟摆等。
习题5
5.1选择题
(1)一物体作简谐振动,振动方程为)2cos(πω+=t A x ,则该物体在0=t 时
刻的动能与8/T t =(T 为振动周期)时刻的动能之比为:
(A)1:4 (B )1:2 (C )1:1 (D) 2:1
[答案:D]
(2)弹簧振子在光滑水平面上作简谐振动时,弹性力在半个周期内所作的功为
(A)kA 2 (B) kA 2/2
(C) kA 2//4 (D)0
[答案:D]
(3)简谐振动过程中,动能和势能相等的位置的位移等于
(A)4A ± (B) 2
A ± (C) 2
3A ± (D) 2
2A ± [答案:D]
5.2 填空题
(1)一质点在X 轴上作简谐振动,振幅A =4cm ,周期T =2s ,其平衡位置取作坐标原点。
若t =0时质点第一次通过x =-2cm 处且向X 轴负方向运动,则质点第二次通过x =-2cm 处的时刻为____s 。
[答案:23
s ]
(2)一水平弹簧简谐振子的振动曲线如题5.2(2)图所示。
振子在位移为零,速度为-ωA 、加速度为零和弹性力为零的状态,对应于曲线上的____________点。
振子处在位移的绝对值为A 、速度为零、加速度为-ω2A 和弹性力为-KA 的状态,则对应曲线上的____________点。
题5.2(2) 图
[答案:b 、f ; a 、e]
(3)一质点沿x 轴作简谐振动,振动范围的中心点为x 轴的原点,已知周期为T ,振幅为A 。
简谐振动的规律和特点简谐振动是指物体在恢复力作用下,沿着一条直线或绕一条固定轴线作往复运动的现象。
简谐振动具有以下规律和特点:1. 定义和公式:简谐振动的定义是指物体的振动轨迹可以用正弦或余弦函数表示的振动。
它的数学描述是一个关于时间的周期函数,可以用如下公式表示:x(t) = A * cos(ωt + φ)其中,x(t)表示物体在时间t时刻的位移,A表示振幅,ω表示角频率,φ表示相位差。
2. 周期性:简谐振动具有周期性,即物体在一定时间间隔内,按照相同的轨迹往复振动。
周期是振动完成一个完整往复运动所需要的时间,用T 表示。
简谐振动的周期与角频率的关系是:T = 2π/ω。
3. 恒定的周期和频率:对于给定的简谐振动体系,周期和频率是恒定不变的。
无论振幅的大小如何变化,简谐振动的周期和频率保持不变。
4. 恢复力和弹性势能:简谐振动的存在是由于恢复力的作用。
恢复力是指当物体偏离平衡位置时,恢复物体回到平衡位置的力。
简谐振动的物体通常具有弹性,当物体受力偏离平衡位置时,会产生弹性势能,而恢复力正是由弹性势能转化而来。
5. 振幅和最大速度:振幅是指振动物体从平衡位置最远的距离,用A表示。
最大速度是指振动物体在振动过程中速度达到最大值的时刻,与振幅有关。
6. 相位差和初相位:相位差是指两个相同频率的简谐振动物体之间的时间差。
初相位是指在某一时刻的相位差。
相位差和初相位的变化会导致振动物体之间的相位关系发生变化。
7. 谐振:当外力与振动频率相同时,振动物体会发生共振现象,这种现象称为谐振。
谐振时,振动物体的振幅会显著增大,甚至可能导致破坏。
8. 能量转换:简谐振动过程中,动能和势能之间会不断转换。
当物体通过平衡位置时,动能最大,势能为零;而当物体达到最大位移时,势能最大,动能为零。
这种能量的转换是循环进行的。
9. 简谐振动的应用:简谐振动在物理学和工程领域有着广泛的应用。
例如,在钟摆、弹簧振子、电磁振荡电路等系统中都存在着简谐振动现象。
简谐振动的基本概念与公式简谐振动是物理学中重要的概念,广泛应用于各个领域。
本文将介绍简谐振动的基本概念、公式以及相关应用。
一、简谐振动的基本概念简谐振动是指物体在一个稳定平衡位置附近以往复性质作振动的现象。
它的特点是周期性、对称性和线性,具有恢复力和惯性力的相互作用。
二、描述简谐振动的公式1. 位移与时间的关系简谐振动的位移与时间的关系可以用正弦函数来描述:x(t) = A * sin(ωt + φ)其中,x(t)表示某一时刻的位移,A表示振幅,ω表示角频率,t表示时间,φ表示初相位。
2. 速度与时间的关系速度与时间的关系可以通过位移对时间的导数来表示:v(t) = A * ω * cos(ωt + φ)其中,v(t)表示某一时刻的速度。
3. 加速度与时间的关系加速度与时间的关系可以通过速度对时间的导数来表示:a(t) = -A * ω^2 * sin(ωt + φ)其中,a(t)表示某一时刻的加速度。
三、简谐振动的重要性简谐振动在物理学的许多领域中都有广泛的应用。
以下是其中几个重要的应用:1. 机械振动简谐振动理论被广泛应用于机械振动领域,如弹簧振子、摆锤等。
通过分析系统的位移、速度和加速度,可以预测系统的动态行为,为设计和优化机械系统提供基础。
2. 声学声波的传播可以通过简谐振动的模型进行描述。
例如,音叉的振动可以看作一个简谐振动系统,通过调整频率和振幅可以产生不同的音调。
3. 电路振荡电路中的振荡器常常采用简谐振动的原理。
例如,由电感、电容和电阻构成的LCR电路可以通过调整元件的参数实现简谐振荡,产生稳定的电信号。
4. 分子振动在化学领域,简谐振动理论被用于描述分子的振动模式。
通过分析分子的谐振频率和振幅,可以预测分子的振动能级和光谱特性。
结论简谐振动作为物理学中的基本概念,具有重要的理论和实际应用价值。
通过上述公式和相关实例的介绍,我们可以更加深入地理解简谐振动的基本特性和应用领域。
在实际问题的研究和应用中,我们可以利用简谐振动的理论框架,对系统的动态行为进行分析和优化。
第五讲 机械振动和机械波§5.1简谐振动5.1.1、简谐振动的动力学特点如果一个物体受到的回复力回F 与它偏离平衡位置的位移x大小成正比,方向相反。
即满足:K F -=回的关系,那么这个物体的运动就定义为简谐振动根据牛顿第二是律,物体的加速度m K m F a -==回,因此作简谐振动的物体,其加速度也和它偏离平衡位置的位移大小成正比,方何相反。
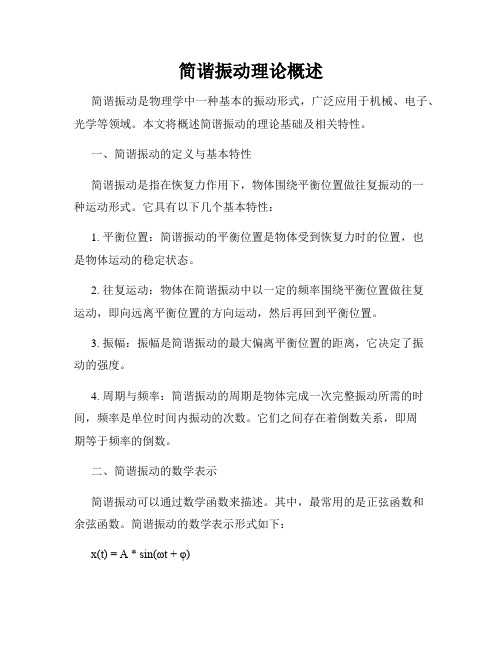
现有一劲度系数为k 的轻质弹簧,上端固定在P 点,下端固定一个质量为m 的物体,物体平衡时的位置记作O 点。
现把物体拉离O 点后松手,使其上下振动,如图5-1-1所示。
当物体运动到离O 点距离为x 处时,有 mg x x k mg F F -+=-=)(0回式中0x 为物体处于平衡位置时,弹簧伸长的长度,且有mg kx =0,因此kx F =回说明物体所受回复力的大小与离开平衡位置的位移x 成正比。
因回复力指向平衡位置O ,而位移x 总是背离平衡位置,所以回复力的方向与离开平衡位置的位移方向相反,竖直方向的弹簧振子也是简谐振动。
注意:物体离开平衡位置的位移,并不就是弹簧伸长的长度。
5.1.2、简谐振动的方程图5-1-1图5-1-2由于简谐振动是变加速运动,讨论起来极不方便,为此。
可引入一个连续的匀速圆周运动,因为它在任一直径上的分运动为简谐振动,以平衡位置O 为圆心,以振幅A 为半径作圆,这圆就称为参考圆,如图5-1-2,设有一质点在参考圆上以角速度ω作匀速圆周运动,它在开始时与O 的连线跟x 轴夹角为0ϕ,那么在时刻t ,参考圆上的质点与O 的连线跟x 的夹角就成为0ϕωϕ+=t ,它在x 轴上的投影点的坐标)cos(0ϕω+=t A x (2)这就是简谐振动方程,式中0ϕ是t=0时的相位,称为初相:0ϕω+t 是t 时刻的相位。
参考圆上的质点的线速度为ωA ,其方向与参考圆相切,这个线速度在x 轴上的投影是0cos(ϕωω+-=t A v ) (3)这也就是简谐振动的速度参考圆上的质点的加速度为2ωA ,其方向指向圆心,它在x 轴上的投影是02cos(ϕωω+-=t A a ) (4) 这也就是简谐振动的加速度 由公式(2)、(4)可得x a 2ω-=由牛顿第二定律简谐振动的加速度为x m km F a -==因此有m k=2ω (5)简谐振动的周期T 也就是参考圆上质点的运动周期,所以k m w T ⋅==ππ225.1.3、简谐振动的判据物体的受力或运动,满足下列三条件之一者,其运动即为简谐运动: ①物体运动中所受回复力应满足 kx F -=;②物体的运动加速度满足 x a 2ω-=;③物体的运动方程可以表示为 )cos(0ϕω+=t A x 。
事实上,上述的三条并不是互相独立的。
其中条件①是基本的,由它可以导出另外两个条件②和③。
§5.2 弹簧振子和单摆简谐振动的教学中经常讨论的是弹簧振子和单摆,下面分别加以讨论。
5.2.1、弹簧振子弹簧在弹性范围内胡克定律成立,弹簧的弹力为一个线性回复力,因此弹簧振子的运动是简谐振动,振动周期k mT π2=。
(1)恒力对弹簧振子的作用比较一个在光滑水平面上振动和另一个竖直悬挂振动的弹簧振子,如果m 和k 都相同(如图5-2-1),则它们的振动周期T 是相同的,也就是说,一个振动方向上的恒力不会改变振动的周期。
如果在电梯中竖直悬挂一个弹簧振子,弹簧原长0l ,振子的质量为m=1.0kg ,电梯静止时弹簧伸长l ∆=0.10m ,从t=0时,开始电梯以g/2的加速度加速下降图5-2-1s t π=,然后又以g/2加速减速下降直至停止试画出弹簧的伸长l ∆随时间t 变化的图线。
由于弹簧振子是相对电梯做简谐运动,而电梯是一个有加速度的非惯性系,因此要考虑弹簧振子所受到的惯性力f 。
在匀速运动中,惯性力是一个恒力,不会改变振子的振动周期,振动周期m k T /2/2πωπ==因为l mg k ∆=/,所以)(2.02s g l T ππ=∆=因此在电梯向下加速或减速运动的过程中,振动的次数都为)(52.0//次===ππT t n当电梯向下加速运动时,振子受到向上的惯性力mg/2,在此力和重力mg 的共同作用下,振子的平衡位置在2//211l k mg l ∆==∆的地方,同样,当电梯向下减速运动时,振子的平衡位置在2/3/232l k mg l ∆==∆的地方。
在电梯向下加速运动期间,振子正好完成5次全振动,因此两个阶段内振子的振幅都是2/l ∆。
弹簧的伸长随时间变化的规律如图5-2-2所示,读者可以思考一下,如果电梯第二阶段的匀减速运动不是从5T 时刻而是从4.5T 时刻开始的,那么t l ~∆图线将是怎样的?(2)弹簧的组合 设有几个劲度系数分别为1k 、2k ……n k 的轻弹簧串联起来,组成一个新弹簧组,当这个新弹簧组在F 力作用下伸长时,各弹簧的伸长为1x ,2图5-2-2那么总伸长∑==ni ix x 1各弹簧受的拉力也是F ,所以有 i i k F x /=故∑==ni i k F x 11根据劲度系数的定义,弹簧组的劲度系数 x F k /=即得∑==ni i k k 11/1如果上述几个弹簧并联在一起构成一个新的弹簧组,那么各弹簧的伸长是相同的。
要使各弹簧都伸长x ,需要的外力∑∑====ni ini i k x x k F 11根据劲度系数的定义,弹簧组的劲度系数∑===ni ik x Fk 1导出了弹簧串、并联的等效劲度系数后,在解题中要灵活地应用,如图5-2-3所示的一个振动装置,两根弹簧到底是并联还是串联?这里我们必须抓住弹簧串并联的本质特征:串联的本质特征是每根弹簧受力相同;并联的本质特征是每根弹簧形变相同。
由此可见图5-2-3中两根弹簧是串联。
当m 向下偏离平衡位置x ∆时,弹簧组伸长了2 x ∆,增加的弹力为212122k k k k xxk F +∆=∆=图5-2-3m 受到的合外力(弹簧和动滑轮质量都忽略)x k k kk k k k k xF ∆+=+∆⨯=∑21212121422所以m 的振动周期21214)(2k k k k m T +=π=2121)(k k k k m +π再看如图5-2-4所示的装置,当弹簧1由平衡状态伸长1l ∆时,弹簧2由平衡位置伸长了2l ∆,那么,由杆的平衡条件一定有(忽略杆的质量)b l k a l k 2211∆=∆∙1212l b a k k l ∆⋅⋅=∆由于弹簧2的伸长,使弹簧1悬点下降122212l b a k k b a l x ∆⋅⋅=∆='∆ 因此物体m 总的由平衡位置下降了22221111l b a k k x l x ∆⎪⎪⎭⎫⎝⎛+⋅='∆+∆=∆此时m 所受的合外力1222122111x b k a k b k k l k F ∆+=∆=∑所以系统的振动周期2212221)(2b k k b k a k m T +=π(3)没有固定悬点的弹簧振子 质量分别为A m 和B m 的两木块A 和B ,用图5-2-4一根劲度系数为k 的轻弹簧联接起来,放在光滑的水平桌面上(图5-2-5)。
现在让两木块将弹簧压缩后由静止释放,求系统振动的周期。
想象两端各用一个大小为F 、方向相反的力将弹簧压缩,假设某时刻A 、B 各偏离了原来的平衡位置A x 和B x ,因为系统受的合力始终是零,所以应该有B B A A x m x m = ①A 、B 两物体受的力的大小k x x F F B A B A )(+== ②由①、②两式可解得AB BA A x m m m k F +=BBBA B x m m m kF +=由此可见A 、B 两物体都做简谐运动,周期都是)(2B A BA m m k m m T +=π此问题也可用另一种观点来解释:因为两物体质心处的弹簧是不动的,所以可以将弹簧看成两段。
如果弹簧总长为0l ,左边一段原长为0l m m m B A B +,劲度系数为km m m B BA +;右边一段原长为0l m m mB A A +,劲度系数为km m m BBA +,这样处理所得结果与上述结果是相同的,有兴趣的同学可以讨论,如果将弹簧压缩之后,不是同时释放两个物体,而是先释放一个,再释放另一个,这样两个物体将做什么运动?系统的质心做什么运动?5.2.2、单摆图5-2-5图5-2-6一个质量为m 的小球用一轻质细绳悬挂在天花板上的O 点,小球摆动至与竖直方向夹θ角,其受力情况如图5-2-6所示。
其中回复力,即合力的切向分力为θs i n⋅=mg F 回 当θ<5º时,△OAB 可视为直角三角形,切向分力指向平衡位置A ,且l x=θs i n ,所以x l mgF =回kx F =回(式中l mg k =)说明单摆在摆角小于5º时可近似地看作是一个简谐振动,振动的周期为g l k m T ππ22==在一些异型单摆中,l 和g 的含意以及值会发生变化。
(1)等效重力加速度g '单摆的等效重力加速度g '等于摆球相对静止在平衡位置时,指向圆心的弹力与摆球质量的比值。
如在加速上升和加速下降的升降机中有一单摆,当摆球相对静止在平衡位置时,绳子中张力为)(a g m ±,因此该单摆的等效重力加速度为g '=a g ±。
周期为a g l T ±=π2再如图5-2-7所示,在倾角为θ的光滑斜面上有一单摆,当摆球相对静止在平衡位置图5-2-7a时,绳中张力为θsin mg ,因此单摆的等效重力加速度为g '=θsin g ,周期为θπsin 2g l T =又如一节车厢中悬挂一个摆长为l 的单摆,车厢以加速度a 在水平地面上运动(如图5-2-8)。
由于小球m 相对车厢受到一个惯性力ma f =,所以它可以“平衡”在OA 位置,g atga =,此单摆可以在车厢中以OA 为中心做简谐振动。
当小球相对静止在平衡位置A 处时,绳中张力为22g a m +,等效重力加速度22g a g +=',单摆的周期222g a l T +=π(2)等效摆长l '单摆的等效摆长并不一定是摆球到悬点的距离,而是指摆球的圆弧轨迹的半径。
如图5-2-9中的双线摆,其等效摆长不是l ,而是θsin l ,周期g l T θπs i n 2=再如图5-2-10所示,摆球m 固定在边长为L 、质量可忽略的等边三角形支架ABC 的顶角C 上,三角支架可围绕固定的AB 边自由转动,AB 边与竖直方向成a 角。
当m 作小角度摆动时,实际上是围绕AB 的中点D 运动,故等效摆长图5-2-9图5-2-10aML L l 2330cos 0=='正因为m 绕D 点摆动,当它静止在平衡位置时,指向D 点的弹力为a mg sin ,等效重力加速度为a g sin ,因此此异型摆的周期a g L g l T sin 2322ππ=''=(3)悬点不固定的单摆如图5-2-11,一质量为M 的车厢放在水平光滑地面上,车厢中悬有一个摆长为l ,摆球的质量为m 的单摆。