简谐振动的相位
- 格式:ppt
- 大小:1.17 MB
- 文档页数:69
简谐振动的特征和表示方法简谐振动是物理学中一种重要的振动现象,广泛应用于各个领域。
本文将论述简谐振动的特征和表示方法,以帮助读者更好地理解和应用简谐振动。
一、简谐振动的特征简谐振动是指受力恢复力与物体偏离平衡位置成正比的振动过程。
简谐振动具有以下主要特征:1. 平衡位置:简谐振动存在一个平衡位置,该位置处物体不受力作用,相对于该位置发生振动。
2. 振动频率:简谐振动的频率是指单位时间内完成的振动周期数。
频率与弹性系数、质量有关,表征了振动快慢。
3. 振幅:简谐振动的振幅是指物体在振动过程中偏离平衡位置的最大距离,振幅与振动能量相关。
4. 相位:简谐振动的相位是指物体在振动过程中的状态,用来描述物体与平衡位置的关系。
相位角随时间变化而变化。
二、简谐振动的表示方法简谐振动可以用多种方式表示,常见的表示方法包括:1. 位移-时间表示:用物体的位移随时间的变化来描述简谐振动。
位移随时间变化呈正弦或余弦函数关系,可表示为x(t) = Acos(ωt + φ),其中A为振幅,ω为角速度,φ为相位角。
2. 速度-时间表示:用物体的速度随时间的变化来描述简谐振动。
速度随时间变化呈正弦或余弦函数关系,可表示为v(t) = -Aωsin(ωt + φ)。
3. 加速度-时间表示:用物体的加速度随时间的变化来描述简谐振动。
加速度随时间变化呈正弦或余弦函数关系,可表示为a(t) = -Aω^2cos(ωt + φ)。
4. 质点运动轨迹表示:简谐振动的质点运动轨迹可以用二维坐标系中的曲线来表示。
常见的简谐振动运动轨迹有直线、椭圆和圆周等形状。
5. 动能-势能图表示:简谐振动的动能-势能图是一种图形表示方法,用来描述振动系统的能量变化。
动能-势能图呈现周期性交替变化的特点,体现了能量从动能到势能再到动能的转换。
三、简谐振动的应用简谐振动在物理学、工程学和生物学等领域有广泛的应用。
以下是几个常见的应用场景:1. 力学系统中的弹性振动:弹簧振子、单摆等力学系统中的振动往往可以近似看作简谐振动,通过振动频率和振幅等参数来描述振动特性。
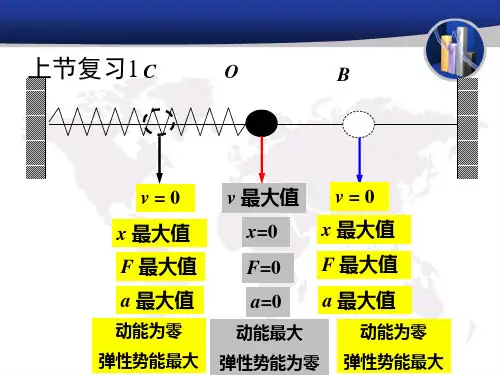
大学物理振动学基础第2讲简谐运动的速度和加速度相位简谐运动的运动学特征是什么?简谐运动的运动状态即位置和速度和什么因素有关?简谐运动的速度和加速度 相位)cos(ϕω+=t A x xtOA 简谐运动的振动曲线一、简谐运动的速度和加速度)cos(ϕω+=t A x Aω=m v )2πcos()sin(d d m ++=+−==ϕωϕωωt t A t x v v ——速度振幅()()πcos cos d d d d m 222++=+−===ϕωϕωωt a t A tx t a v Aa 2m ω=——加速度振幅xtx a 222d d ω−== 简谐运动的加速度与位移成正比而反向.————简谐运动的运动学特征(判据之一)()ϕωω+−==t A tx a cos d d 222二、x~t,v~t,a~t 图速度和加速度均随时间作周期性变化, 其初相各不同.三、简谐运动的相位0==⇒=+v A x t ϕω物体在正向最大处物体在平衡位置处0π=−=⇒=+v A x t ϕω物体在负向最大处物体在平衡位置处max02πv v −==⇒=+x t ϕωmax0π23v v ==⇒=+x t ϕω简谐运动的运动状态即位置和速度是由振动相位决定的.相位相差2π或2π的整数倍时, 所描述的振动状态完全相同. 相位描述更能反映运动的周期性特征. 当 t = 0 时, 相位为 ϕ , 即“初相位”.)sin(ϕωω+−=t A v )cos(ϕω+=t A x简谐运动表达式中的常数 A 和 ϕ 的值取决于初始条件:00cos )cos(x A t A x t t ==+===ϕϕω000sin )sin(d d v v =−=+−====ϕωϕωωA t A t x t t 将上述两式平方后相加和相除,即得⎟⎟⎠⎞⎜⎜⎝⎛−=00arctan xωϕv 202⎟⎠⎞⎜⎝⎛+=ωv x A例题 一轻弹簧一端固定, 另一端连接一定质量的物体. 整个系统位于水平面内, 系统的角频率为 6.0s -1. 今将物体沿平面向右拉长到 x 0=0.04m 处释放, 试求(1)简谐运动表达式;(2)物体从初始位置运动到第1次经过A /2处时的速度.m04.0020220==+=x x A ωv 0arctan 0=⇒−=ϕωϕx v 解: (1)由初始条件得振幅和初相位为m0.6cos 04.0t x =简谐运动表达式为解: (2)将A /2代入方程, 得t A Aωcos 2=21cos =t ω)35πor (3π=⇒t ω⎩⎨⎧−=t A ωωsin v -1sm 208.0:⋅−=v 按题意1-sm 208.0)3π(sin 0.604.0⋅−=×−=1-s m 208.0)3π5(sin 0.604.0⋅=×−= 例题 一轻弹簧一端固定, 另一端连接一定质量的物体. 整个系统位于水平面内, 系统的角频率为 6.0s -1. 今将物体沿平面向右拉长到 x 0=0.04m 处释放, 试求(1)简谐运动表达式;(2)物体从初始位置运动到第1次经过A /2处时的速度.。
简谐振动的规律和特点简谐振动是一种重要的物理现象,它在自然界和人类生活中都有广泛的应用。
本文将详细介绍简谐振动的规律和特点,并从多个角度进行描述。
一、简谐振动的规律和特点1. 定义:简谐振动是指物体在一个平衡位置附近做往复振动的运动。
它的运动方式具有周期性和对称性,是一种非常规律的振动。
2. 弹簧振子的例子:弹簧振子是最常见的简谐振动的例子之一。
当弹簧振子受到外力拉伸或压缩后,当外力移除时,它会以平衡位置为中心作往复振动。
3. 动力学规律:简谐振动的运动规律可以由胡克定律和牛顿第二定律得出。
根据胡克定律,当弹性体受力时,其恢复力与位移成正比。
牛顿第二定律则表明物体的加速度与作用力成正比,与质量成反比。
结合这两个定律,可以推导出简谐振动的运动方程。
4. 运动方程:简谐振动的运动方程可以表示为x = A * sin(ωt + φ),其中x是物体的位移,A是振幅,ω是角频率,t是时间,φ是相位差。
这个运动方程描述了物体在平衡位置两侧往复振动的过程。
5. 特点一:周期性。
简谐振动的最基本特点是其运动是周期性的,即物体在一个周期内重复完成相同的运动。
周期T是指物体完成一个完整振动所需的时间,与角频率ω的倒数成正比。
6. 特点二:振幅和频率。
简谐振动的振幅A表示物体在振动过程中最大的位移,频率f表示单位时间内完成的振动次数。
振幅和频率都是简谐振动的重要参数,它们与物体的质量、劲度系数、外力等因素有关。
7. 特点三:相位差和初相位。
相位差是指两个简谐振动之间的时间差,初相位是指物体在某一时刻的位移相对于平衡位置的位置。
相位差和初相位对于描述简谐振动的运动状态和相互作用非常重要。
8. 特点四:能量转化。
简谐振动是一种能量在不同形式之间转化的过程。
在振动过程中,物体的动能和势能会不断相互转化,当物体通过平衡位置时,动能最大,而位移最大时,势能最大。
9. 特点五:应用广泛。
简谐振动的规律和特点在物理学、工程学、生物学等领域都有广泛的应用。
简谐振动的三种表示方法“同学们,今天我们来学习简谐振动的三种表示方法。
”我站在讲台上对学生们说道。
简谐振动可是物理学中非常重要的一个知识点啊。
那它的三种表示方法是什么呢?首先就是解析式表示法。
我们可以用一个数学式子来精确地描述简谐振动,比如x=A sin(ωt+φ),这里的 A 就是振幅,表示振动的幅度大小;ω是角频率,决定了振动的快慢;φ则是初相位。
就好比说钟摆的运动,它的摆动就可以用这样的解析式来表示,我们通过这个式子就能清楚地知道它在不同时刻的位置。
接着是图像表示法。
我们可以通过画出振动的位移随时间变化的图像来直观地了解简谐振动。
就像我们研究弹簧振子的振动时,我们可以把它在不同时间点的位移记录下来,然后画在坐标纸上,这样就能得到一条正弦曲线。
同学们看,这样是不是一下子就能明白它的振动规律了呢?还有就是旋转矢量表示法。
我们可以把简谐振动想象成一个旋转的矢量,这个矢量的长度就是振幅,它旋转的角速度就是角频率。
比如说单摆,我们可以用旋转矢量来很好地理解它的运动过程。
给同学们举个例子吧,大家都见过荡秋千吧。
秋千的来回摆动就是一种简谐振动。
我们可以用解析式来描述它在不同时刻的位置,通过图像看到它的位移变化,还可以用旋转矢量来理解它的运动过程。
这样是不是对简谐振动的理解更深刻了呢?同学们一定要好好理解这三种表示方法,它们在解决很多物理问题时都非常有用。
而且不仅仅是在物理领域,在其他很多方面也都有应用呢。
比如说在机械振动、声波、电磁波等方面都有着重要的意义。
希望同学们通过今天的学习,能真正掌握简谐振动的三种表示方法,以后遇到相关问题就能轻松解决啦。
好了,今天的课就上到这里,同学们还有什么问题吗?。
简谐振动的规律和特点简谐振动是物体在外力作用下以固有频率振动的一种运动形式。
它具有以下的规律和特点:1. 规律性:简谐振动的运动规律是非常规律的,它可以用简单的正弦函数来描述。
物体在振动过程中,位置、速度和加速度都是随时间变化的,且呈正弦函数的关系。
2. 周期性:简谐振动的运动是周期性的,即物体在一个周期内的运动是重复的。
一个周期是指物体从某一固定位置出发,经过一段时间后重新回到相同的位置。
3. 固有频率:每个物体都有自己的固有频率,即物体在没有外力作用下的振动频率。
固有频率取决于物体的质量、弹性系数和几何形状。
当外力的频率等于物体的固有频率时,简谐振动达到共振状态,振幅达到最大值。
4. 振幅和周期的关系:简谐振动的振幅和周期之间存在着关系,即振幅越大,周期越长。
振幅是指物体在振动过程中离开平衡位置的最大距离。
5. 能量守恒:简谐振动过程中,物体的机械能守恒。
当物体从最大位移回到平衡位置时,动能最大,势能最小;而当物体到达最大位移时,势能最大,动能最小。
二者之和始终保持不变。
6. 相位差:简谐振动中,相位差描述了两个振动物体之间的时间关系。
相位差的变化可以影响振动的合成结果,当相位差为0时,两个振动物体达到最大振幅;当相位差为180度时,两个振动物体达到最小振幅。
7. 可加性:简谐振动具有可加性,即多个简谐振动叠加后仍然是简谐振动。
这是因为简谐振动的运动方程是线性的,满足叠加原理。
总结起来,简谐振动具有规律性、周期性、固有频率、振幅和周期的关系、能量守恒、相位差和可加性等特点。
这些特点使得简谐振动在物理学和工程学中有着广泛的应用,例如弹簧振子、摆钟等。
对于科学研究和工程设计来说,了解简谐振动的规律和特点是非常重要的。
简谐运动的振动方程
简谐运动是一种特殊的周期性运动,其振幅在一个固定的周期内按照
正弦或余弦函数进行变化。
简谐运动在物理学中有着广泛的应用,如
弹簧振子、单摆等都属于简谐运动。
因此,了解简谐运动的振动方程
是非常重要的。
简谐运动的振动方程可以表示为:
x = A * sin(ωt + φ)
其中,x表示物体距离平衡位置的位移,A表示振幅,ω表示角频率,t表示时间,φ表示初相位。
角频率ω和周期T之间有以下关系:
ω = 2π/T
初相位φ是指物体在t=0时刻所处的相位。
如果物体在平衡位置右侧,则φ为正;如果物体在平衡位置左侧,则φ为负。
由于sin函数是周期性函数,在一个周期内它会不断地从0到1再到0
再到-1再回到0。
因此,在一段时间内完成若干个周期后,物体又回到了初始状态。
简谐运动还有另一种表达方式:x = A * cos(ωt + φ)。
这两种表达方式本质上是等价的,只是相位不同而已。
除了上述公式外,还有一些与简谐运动相关的公式。
例如,简谐运动的周期T和频率f之间有以下关系:
T = 1/f
简谐运动的角频率ω和频率f之间有以下关系:
ω = 2πf
简谐运动的周期T和振幅A之间有以下关系:
T = 2π√(m/k)
其中,m表示物体的质量,k表示弹簧的劲度系数。
总之,了解简谐运动的振动方程是非常重要的。
在物理学中,我们可以通过这个方程来计算物体在不同时间点处于什么位置、速度和加速
度等参数。
因此,掌握这个方程可以帮助我们更好地理解和应用简谐运动。

简谐运动初相位公式是:X=Asin(2π/T+φ。
简谐运动是最基本也最简单的机械振动。
当某物体进行简谐运动时,物体所受的力跟位移成正比,并且总是指向平衡位置。
在平衡状态的力学系统受到微扰后由于其平衡位置的特殊性而引起的稳定性问题。
若不论时间多长,受微扰后的系统对原位置的偏差能随初始扰动的减小而受到任意指定的限制,则此位置是稳定的;反之,该位置是不稳的。
例如小球在竖立的圆形轮圈上有两个平衡位置,致高点A是不稳定位置,最低点B是稳定位置。
第22卷第3期2024年3月动力学与控制学报J O U R N A L O F D Y N AM I C S A N D C O N T R O LV o l .22N o .3M a r .2024文章编号:1672-6553-2024-22(3)-88-005D O I :10.6052/1672-6553-2023-0132023-02-02收到第1稿,2023-03-07收到修改稿.*国家自然科学基金资助项目(11602131,51968020),海南省自然科学基金高层次人才项目(820R C 586),海南省科协青年科技英才学术创新计划项目(Q C X M 201913),海南大学教育教学改革研究项目(h d j y1967),N a t i o n a l N a t u r a l S c i e n c e F o u n d a t i o n o f C h i n a (11602131,51968020),H a i n a n P r o v i n c i a l N a t u r a l S c i e n c e F o u n d a t i o n o f C h i n a (820R C 586),H a i n a n A s s o c i a t i o n f o r S c i e n c e a n d T e c h n o l o g y(Q C X M 201913),E d u c a t i o n a n d T e a c h i n g R e f o r m R e s e a r c h P r o j e c t o f H a i n a n U n i v e r s i t y (h d j y1967).†通信作者E -m a i l :g c z h a n g@h a i n a n u .e d u .c n 简谐振动初相位之唯一性浅谈*张国策† 聂磊 陈云(海南大学土木建筑工程学院,海口 570228)摘要 振幅㊁频率和相位是简谐振动的三要素.其中,相位角的周期是2π.在一个周期(-π,π]内,任意简谐振动响应的初相位必须具有唯一性.该问题常被忽视.将相位角表示成反正切函数时需要考虑反三角函数的值域.在此对部分著作中的常见错误作简要修正.关键词 自由振动, 受迫振动, 初相位中图分类号:O 321文献标志码:AO n t h e U n i q u e n e s s o f I n i t i a l P h a s e i n S i m pl e H a r m o n i c V i b r a t i o n Z h a n g Gu o c e †N i e L e i C h e n Y u n (S c h o o l o f C i v i l E n g i n e e r i n g a n d A r c h i t e c t u r e ,H a i n a n U n i v e r s i t y,H a i k o u 570228,C h i n a )A b s t r a c t A m p l i t u d e ,f r e q u e n c y a n d p h a s e a r e t h r e e p a r a m e t e r s o f s i m pl e h a r m o n i c v i b r a t i o n .T h e p e r i -o d o f p h a s e a n g l e i s 2π.T h e i n i t i a l p h a s e a n g l e o f a n y s i m p l e h a r m o n i c v i b r a t i o n m u s t b e u n i qu e i n t h e i n t e r v a l (-π,π].T h i s u n i q u e n e s s i s o f t e n o v e r l o o k e d .W h e n t h e p h a s e a n g l e i s e x pr e s s e d i n t h e f o r m o f a n a r c t a n g e n t f u n c t i o n ,t h e v a l u e r a n g e o f t h e i n v e r s e t r i g o n o m e t r i c f u n c t i o n n e e d s t o b e c o n s i d e r e d .T h e c o mm o n m i s t a k e s i n s o m e m o n o g r a ph s a r e c o r r e c t e d h e r e .K e y wo r d s f r e e v i b r a t i o n , f o r c e d v i b r a t i o n , i n i t i a l p h a s e 引言振动在土木建筑㊁国防军工㊁道路桥梁㊁防震减灾等工程领域相当重要.根据激励性质不同,机械振动可分为固有振动[1,2]㊁自由振动[3,4]㊁受迫振动[5,6]㊁自激振动[7,8]和参数振动[9,10].简谐运动是最常见的振动形式.振幅㊁频率和相位是简谐振动的三要素.众多参考书介绍振动响应时,初相位常常需要被修正[11-27].对于线性振动微分方程,一般可以精确求解.求解过程中,先构造振动响应的形式解;然后结合初始条件,分别求得振幅㊁频率和初相位.在求相位角时,通常先求出初相位的正弦值与余弦值,进而将初相位表示成已知参数组合的反三角函数.但是,反三角函数的值域与初相位的取值范围往往不一致.如果不注意值域,对于特定的系统参数组合,将可能导致与实际情况完全不符的振动响应.此类问题层出不穷,需要重视.下面以单自由度振动系统为例,分别研究自由振动和受迫振动,在半开半闭区间(-π,π]内就初相位唯一性作简要论述.第3期张国策等:简谐振动初相位之唯一性浅谈1 自由振动单自由度无阻尼系统自由振动是最基本的振动现象.以单自由度质量-弹簧系统构成的简谐振子为研究对象,质量块偏离平衡位置的距离x 随时间t 变化的规律满足如下微分方程:m x ㊃㊃+k x =0(1)式中,m 表征质量块的质量,k 表征弹簧刚度,两者取值均为正数.胡海岩[16]等指出,自由振动控制方程(1)的形式解可写作:x (t )=A s i n (ω0t +α)(2)式中,固有圆频率:ω0=km>0(3)考虑如下初始条件:x (t =0)=x 0,x ㊃(t =0)=v 0(4)将式(2)代入式(4)可得:A s i n α=x 0,A c o s α=v 0ω0(5)解之得振幅:A =x 20+v 2ω2(6)若初始速度非零,则可得初相位[11-25]:α=a r c t a nx 0ω0v 0ɪ-π2,π2(7)事实上,式(7)限制了相位角的值域,其余弦值始终为正,这就要求初始速度的代数值大于零.只有当初始速度方向与位移x 正方向一致时,式(7)才是正确的.因此,该相位角(7)不一定是原系统(1)的解.如果v 0<0,那么初始速度方向与x 正方向相反,相位角(7)将给出错误的结果.修正如下:α*=f (x 0)㊃a r c c o sv 0ω2x 20+v20ɪ(-π,π](8)式中,f 为分段函数:f (x 0)=-1x 0<01x 0ȡ0(9)显然,自由振动响应的初相位与初始条件密切相关.综上所述,自由振动系统(1)的响应为:x *(t )=x 0c o s t km+m k v 0s i n t k m(10)2 受迫振动考虑黏性阻尼力,单自由度振动系统受简谐激励作用时的微分方程为:m x ㊃㊃+c x ㊃+k x =h s i n (ωt )(11)式中,c 表征黏性阻尼系数,h 表征简谐激振力的幅值,ω表征简谐激振力的频率,三者取值均为正数.闻邦椿等[17,19]指出,受迫振动稳态响应与初始条件无关,其形式解可写作:x (t )=Bs i n (ωt +β)(12)将式(12)代入式(11)可得:B s i n β=-c ωh c 2ω2+m 2(ω20-ω2)2B c o s β=m h (ω20-ω2)c 2ω2+m 2(ω20-ω2)2(13)解之得振幅:B =hc 2ω2+m 2(ω2-ω2)2(14)稳态响应时的初相位为[16-27]β=a r c t a n c ωm (ω2-ω20)ɪ-π2,π2(15)事实上,式(15)限制了相位角的值域,其余弦值始终为正,这就要求外激励频率必须足够小.只有当激励频率ω小于派生无阻尼系统(1)的固有频率时,式(15)才是正确的.这与实际振动条件不符.因此,该相位角(15)不一定是原系统(11)稳态响应时的初相位.如果外激励振动过快,激励频率较大,那么相位角(15)将给出错误的结果.考虑到阻尼系数和激励频率的代数值均为正数,由式(13)可知,初相位的正弦值小于零.因此,修正相位角如下所示:β*=-ar c c o s m (ω20-ω2)c 2ω2+m 2(ω2-ω2)2ɪ(-π,0)(16)考虑初始条件(4),根据常微分方程理论,小阻尼情形时受迫振动系统(11)的响应为:x (t )=h (k -m ω2)s i n (ωt )-c ωh c o s (ωt )c 2ω2+(k -m ω2)2+ x 0+c ωh c 2ω2+(k -m ω2)2e -c t 2m c o s t 4m k -c 22m+ 2m v 0+c x 04m k -c2e -c t2m s i n t 4m k -c 22m +98动 力 学 与 控 制 学 报2024年第22卷ωh (c 2-2m k +2m 2ω2)c 2ω2+(k -m ω2)2 4m k -c 2e-c t2mˑs i n t 4m k -c 22m(17)3 数值验证为了使用龙格-库塔法进行数值计算,引入速度变量v (t ),将振动方程(11)改写为如下微分方程组:x ㊃=vv ㊃=h s i n (ωt )-c v -k x m(18)考虑如下参数组合:c =h =0,m =1.0k g,k =1.0N /m (19)此时,系统(18)代表了单自由度无阻尼振动系统(1).特选取初始条件如下:x (t =0)=0.4m ,x ㊃(t =0)=-0.3m /s (20)数值仿真过程中令时间步长为0.0001s,采样点为0.5s,计算结果如图1中蓝色实心圆点所示.基于文献[11]~文献[25],由式(2,3,6,7)可得解析结果:x 1(t )ʈ0.5s i n (t -53.1301ʎ)m (21)因所选初始速度为负数,故需修正相位角.由式(2,3,6,8)可得改进结果:x *1(t )ʈ0.5s i n (t +126.8699ʎ)m(22)图1 自由振动周期响应F i g .1 T h e p e r i o d i c r e s po n s e o f f r e e v i b r a t i o n 从图1示出了自由振动响应(21)与(22)的对比结果.图中虚线代表文献[11]~文献[25]中的响应解(21).实线代表改进结果(22),与数值仿真结果一致.图例表明,初相位不同,将导致多数时刻振动响应计算结果偏离真实值,甚至包括初始时刻.再计算受迫振动系统,不妨考虑如下参数组合:c =0.5N ㊃s /m ,m =1.0k g,k =1.0N /m (23)初始条件仍为式(20),特选取激励参数为:h =0.4m ,ω=1.2r a d /s(24)仿真过程中令时间步长为0.0001s,采样点为0.5s ,根据式(18)数值计算暂态响应如图2中红色实心圆点所示.图中实线代表小阻尼受迫振动系统的响应(17).两者完全重合.数值验证结果支持式(17)是有阻尼系统(11)的一个解析解.图2 受迫振动暂态响应F i g .2 T h e t r a n s i e n t r e s po n s e o f f o r c e d v i b r a t i o n 随着计算时长变大,系统逐渐进入稳态.基于文献[16]~文献[27],由式(12,14,15)可得近似解析结果:x 2(t )ʈ0.5376s i n (1.2t +53.7462ʎ)m (25)因所选激励频率大于固有频率,故上式将给出错误的结果.修正相位角后,由式(12,14,16)可得改进结果.稳态响应近似为:x *2(t )ʈ0.5376s i n (1.2t -126.2538ʎ)m(26)图3 受迫振动稳态响应F i g .3 T h e s t e a d y -s t a t e r e s po n s e o f f o r c e d v i b r a t i o n 从图3示出了受迫振动稳态响应(25)与(26)的对比结果.图中虚线代表文献[16]~文献[27]中的响应解(25).实线代表改进结果(26),与数值仿09第3期张国策等:简谐振动初相位之唯一性浅谈真结果吻合.图例表明,相位角不同,将导致多数时刻振动响应计算结果偏离真实值.4结束语相位角是简谐振动的三要素之一.分别考虑自由振动和受迫振动,给出了任意初始条件下系统响应的解析解.理论求解过程中,如果不注意反三角函数的值域,将可能导致与实际情况完全不符的振动响应.日常科研中应受到重视.(1)无阻尼线性系统自由振动时,初相位与初始条件㊁固有频率均相关,且在区间(-π,π]内具有唯一性.(2)线性阻尼系统受简谐激励时,稳态响应与初始条件无关,但相位角与激励频率㊁固有频率密切相关,且初相位在区间(-π,π]内具有唯一性.参考文献[1]胡海岩.论固有振型的节点规律[J].动力学与控制学报,2018,16(3):193-200.HU H Y.O n n o d e n u m b e r o f a n a t u r a l m o d e-s h a p e[J].J o u r n a l o f D y n a m i c s a n d C o n t r o l,2018,16(3):193-200.(i n C h i n e s e)[2]胡海岩.杆在固有振动中的对偶关系[J].动力学与控制学报,2020,18(2):1-8.HU H Y.D u a l i t y r e l a t i o n s o f r o d s i n n a t u r a l v i b r a-t i o n s[J].J o u r n a l o f D y n a m i c s a n d C o n t r o l,2020,18(2):1-8.(i n C h i n e s e)[3]肖和业,盛美萍,赵芝梅.弹性边界条件下带有任意分布弹簧质量系统的梁自由振动的解析解[J].工程力学,2012,29(9):318-323.X I A O H Y,S H E N G M P,Z HA O Z M.A n a n a l y t-i c s o l u t i o n f o r a b e a m w i t h a r b i t r a r i l y d i s t r i b u t e ds p r i n g-m a s s s y s t e m s u n d e r e l a s t i c b o u n d a r y c o n d i-t i o n[J].E n g i n e e r i n g M e c h a n i c s,2012,29(9):318-323.(i n C h i n e s e)[4]李海超,庞福振,张航,等.阶梯厚度圆柱壳自由振动特性分析[J].振动工程学报,2020,33(6):1226-1233.L I H C,P A N G F Z,Z HA N G H,e t a l.F r e e v i b r a-t i o n a n a l y s i s o f s t e p p e d c y l i n d r i c a l s h e l l s[J].J o u r-n a l o f V i b r a t i o n E n g i n e e r i n g,2020,33(6):1226-1233.(i n C h i n e s e)[5]黄慧春,张艳雷,陈立群.超临界下受迫输液管2:1内共振的响应特性[J].噪声与振动控制,2014,34(2):8-11.HU A N G H C,Z HA N G Y L,C H E N L Q.R e s o-n a n c e a n a l y s i s o f a f o r c e d f l u i d-c o n v e y i n g p i p e w i t h2:1i n t e r n a l r e s o n a n c e s u n d e r s u p e r c r i t i c a l f l u i d v e-l o c i t y[J].N o i s e a n d V i b r a t i o n C o n t r o l,2014,34(2):8-11.(i n C h i n e s e)[6]康厚军,丛云跃,郭铁丁.‘结构动力学“中多频激励多自由度系统稳态解的新方法[J].动力学与控制学报,2021,19(2):91-98.K A N G H J,C O N G Y Y,G U O T D.A n e w m e t h-o d f o r s t e a d y-s t a t e r e s p o n s e o f m u l t i-D O F s y s t e mw i t h m u l t i-f r e q u e n c y h a r m o n i c e x c i t a t i o n s i n s t r u c-t u r a l d y n a m i c s[J].J o u r n a l o f D y n a m i c s a n d C o n-t r o l,2021,19(2):91-98.(i n C h i n e s e) [7]李英杰,赵广,吴学深,等.航空花键-转子系统自激振动研究综述[J].航空学报,2022,43(8):625532.L I Y J,Z HA O G,WU X S,e t a l.R e v i e w o f r e-s e a r c h o n s e l f-e x c i t e d v i b r a t i o n o f a v i a t i o n s p l i n e-r o t o r s y s t e m[J].A c t a A e r o n a u t i c a e t A s t r o n a u t i c aS i n i c a,2022,43(8):625532.(i n C h i n e s e) [8]李飞胤,马少杰,张合.颗粒自激式冲击-振动耦合力学试验方法及试验研究[J].振动与冲击,2023,42(3):227-234.L I F Y,MA S J,Z HA N G H.P a r t i c l e s e l f-e x c i t e di m p a c t-v i b r a t i o n c o u p l e d m e c h a n i c a l t e s t m e t h o d a n dt e s t s t u d y[J].J o u r n a l o f V i b r a t i o n a n d S h o c k,2023,42(3):227-234.(i n C h i n e s e) [9]张云飞,杨鄂川,李映辉.变截面粘弹性旋转梁非线性参数振动研究[J].动力学与控制学报,2018,16(5):418-423.Z HA N G Y F,Y A N G E C,L I Y H.S t u d i e s o nn o n l i n e a r p a r a m e t r i c v i b r a t i o n o f a r o t a t i n g v i s c o e-l a s t i c b e a m w i t h v a r i a b l e c r o s s-s e c t i o n s[J].J o u r n a lo f D y n a m i c s a n d C o n t r o l,2018,16(5):418-423.(i n C h i n e s e)[10]唐冶,王涛,丁千.主动控制压电旋转悬臂梁的参数振动稳定性分析[J].力学学报,2019,51(6):1872-1881.T A N G Y,WA N G T,D I N G Q.S t a b i l i t y a n a l y s i so n p a r a m e t r i c v i b r a t i o n o f p i e z o e l e c t r i c r o t a t i n g c a n-t i l e v e r b e a m w i t h a c t i v e c o n t r o l[J].C h i n e s e J o u r n a lo f T h e o r e t i c a l a n d A p p l i e d M e c h a n i c s,2019,51(6):1872-1881.(i n C h i n e s e)[11]G I U R G I U T I U V.s t r u c t u r a l h e a l t h m o n i t o r i n g w i t hp i e z o e l e c t r i c w a f e r a c t i v e s e n s o r[M].2n d e d.O x-f o r d,U K:A c a d e m i c P r e s s,2014.19动力学与控制学报2024年第22卷[12]Z HO U S D,H E Y L E N W,L I U L.S t r u c t u r a l D y-n a m i c s[M].B e i j i n g:B e i j i n g I n s t i t u t e o f T e c h n o l o-g y P r e s s,2016.[13]陈立群,戈新生,徐凯宇,等.理论力学[M].北京:清华大学出版社,2006.[14]刘习军,张素侠.工程振动测试技术[M].北京:机械工业出版社,2016.L I U X J,Z HA N G S X.E n g i n e e r i n g v i b r a t i o n t e s-t i n g t e c h n o l o g y[M].B e i j i n g:C h i n a M a c h i n eP r e s s,2016.(i n C h i n e s e)[15]殷祥超.振动理论与测试技术[M].3版.徐州:中国矿业大学出版社,2017.[16]胡海岩.机械振动基础[M].北京:北京航空航天大学出版社,2005.[17]闻邦椿,刘树英,陈照波,等.机械振动理论及应用[M].北京:高等教育出版社,2009.W E N B C,L I U S Y,C H E N Z B,e t a l.T h e o r y o fm e c h a n i c a l v i b r a t i o n a n d i t s a p p l i c a t i o n s[M].B e i-j i n g:H i g h e r E d u c a t i o n P r e s s,2009.(i n C h i n e s e) [18]李俊峰,张雄.理论力学[M].2版.北京:清华大学出版社,2010.[19]闻邦椿,刘树英,张纯宇.机械振动学[M].2版.北京:冶金工业出版社,2011.[20]师汉民,黄其柏.机械振动系统 分析㊃建模㊃测试㊃对策[M].3版.武汉:华中科技大学出版社,2013.S H I H M,HU A N G Q B.V i b r a t i o n s y s t e m s:a n a-l y z i n g,m o d e l i n g,t e s t i n g,c o n t r o l i n g[M].3r d e d.W u h a n:H u a z h o n g U n i v e r s i t y o f S c i e n c e a n d T e c h-n o l o g y P r e s s,2013.(i n C h i n e s e)[21]胡准庆.机械振动基础[M].北京:北京交通大学出版社,2013.HU Z Q.F o u n d a t i o n o f m e c h a n i c a l v i b r a t i o n[M].B e i j i n g:B e i j i n g J i a o t o n g U n i v e r s i t y P r e s s,2013.(i n C h i n e s e)[22]黄迎春.船艇振动与噪声[M].哈尔滨:哈尔滨工程大学出版社,2015.[23]陈虹微.机械振动机理及控制技术[M].北京:中国纺织出版社,2019.[24]李有堂.机械振动理论与应用[M].2版.北京:科学出版社,2020.[25]刘延柱,陈立群,陈文良.振动力学[M].3版.北京:高等教育出版社,2019.L I U Y Z,C H E N L Q,C H E N W L.M e c h a n i c s o fv i b r a t i o n s[M].3r d e d.B e i j i n g:H i g h e r E d u c a t i o nP r e s s,2019.(i n C h i n e s e)[26]刘延柱,陈立群.非线性振动[M].北京:高等教育出版社,2001.L I U Y Z,C H E N L Q.N o n l i n e a r v i b r a t i o n s[M].B e i j i n g:H i g h e r E d u c a t i o n P r e s s,2001.(i nC h i-n e s e)29。