陀螺罗经指北原理综述
- 格式:ppt
- 大小:1012.00 KB
- 文档页数:23



§ §1 1- -8 摆式罗经的 减幅摆动减幅摆动一、变等幅摆动为减幅摆动的途径l欲使主轴在偏离子 午面后,能做减幅摆 动,最后到达稳定位 置,除了控制设备外 还必须增加阻尼设备。
ll 阻尼设备应: ll 当主轴向着稳定位置运 动时,使其速度加快; ll 当主轴偏离稳定位置运 动时,使其速度减慢。
动时,使其速度减慢。
1 1.要求:.要求: 从而使主轴通过减幅摆动能较快地抵达其稳定位置达其稳定位置2 .方法:.方法: 根据阻尼力矩的方向,分为两种:根据阻尼力矩的方向,分为两种: 11)水平轴阻尼法:(又称 长轴阻尼法)阻尼力矩作用于水平轴 ( (OY OY 轴) 轴) —— ——下重式罗经下重式罗经 22)垂直轴阻尼法:(又称短 轴阻尼法)阻尼力矩作用于垂直轴 ( (OZ OZ 轴) 轴) —— ——液体连通器式罗经液体连通器式罗经二、下重式罗经的减幅摆动l下重式罗经采用水 平轴阻尼法, ll 阻尼器产生的阻尼 力矩作用于陀螺坐标 系的 系的OY OY 轴上。
ll 阻尼力矩由液体阻 尼器产生。
尼器产生。
H阻尼器陀螺球陀螺仪陀螺仪1 .液体阻尼器的构成及作用.液体阻尼器的构成及作用 l在陀螺球内两个陀螺仪上方沿 在陀螺球内两个陀螺仪上方沿OX OX 轴方 向装一个油液连通器,内装粘度很大的 阻尼油液。
ll 连通器南北各有一个油室,下面有连 通管,上面有通气管相连。
ll 油液粘度大,流动缓慢,出现迟滞现 象: ll 形成油的流动周期比主轴高度角的变 化周期 化周期落后 落后1/4 1/4周期 周期。
。
作图分析:ll 当出现油液差时,产生阻尼力矩。
l l 主轴偏在子午面之东时,阻尼力矩 主轴偏在子午面之东时,阻尼力矩M M D D 指西; l l 主轴偏在子午面之西时,阻尼力矩 主轴偏在子午面之西时,阻尼力矩M M D D 指东; l l 总之,阻尼力矩 总之,阻尼力矩M M D D 总是指向子午面。

第二节 陀螺罗经概述1.发展法国物理学家列昂.福科(Leon Foucault) 1852年提出的陀螺指向理论;现代船舶上普遍使用的陀螺罗经于本世纪初研制成功的船舶指向仪器。
1908年德国生产出了安许茨型陀螺罗经(ANSCHÜTZ gyrocompass);1911年美国生产出了斯伯利型陀螺罗经(SPERRY gyrocompass);1916年英国生产出了勃朗型陀螺罗经(BROWN gyrocompass)。
2.分类近百年,生产出了近百种型号的陀螺罗经,主要分为三大系列或两大类型。
按照结构特点和工作原理分为三大系列:即安许茨系列;斯伯利系列;阿玛-勃朗系列。
按照灵敏部分转子个数分为两大类型:即单转子陀螺罗经和双转子陀螺罗经。
按照控制力矩的性质分为两大类型:机械摆式陀螺罗经和电磁控制式陀螺罗经。
按照阻尼方式分两大类型:水平轴阻尼陀螺罗经和垂直轴阻尼陀螺罗经。
3.与磁罗经相比较,陀螺罗经的主要优缺点主要优点:指向精度高;多个复示器,有利于船舶自动化;不受磁干扰影响,指向误差小;安装位置不受限制等。
主要缺点:必须有电源才能工作(可靠性较差);工作原理、结构复杂。
4.发展趋势体积小型化;广泛采用先进技术;提高指向可靠性和使用寿命;简化维护保养。
一、陀螺罗经指北原理1.自由陀螺仪及其特性1)自由陀螺仪(free gyroscope)定义陀螺仪从广义讲就是一种能绕定点高速旋转的对称刚体。
实用陀螺仪是高速旋转的对称刚体及其悬挂装置的总称。
按其悬挂装置不同分为单自由度陀螺仪(single-degree of freedom gyro.)、二自由度陀螺仪(two-degree of freedom gyro.)和三自由度陀螺仪(three-degree of freedom gyro.)。
平衡陀螺仪(balanced gyroscope):若陀螺仪的重心(G)与中心(O)重合。
自由陀螺仪:重心(G)与中心(O)重合,不受任何外力矩作用的三自由度平衡陀螺仪。
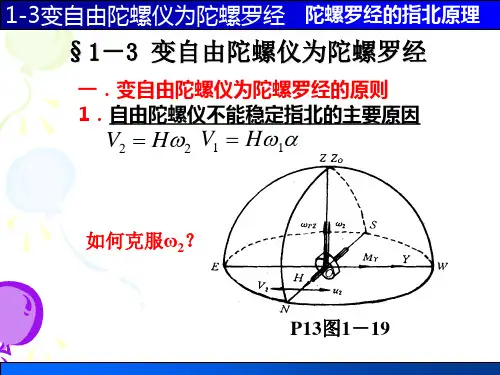
陀螺罗经的指北原理
陀螺罗经是一种用来确定地理位置和方向的仪器,它可以通过测量地球上的自转轴方向来确定真北方向。
陀螺罗经是一项高精度的仪器,在航海、航空和科学研究中被广泛应用。
指北原理是陀螺罗经的核心原理,指北就是确定方向,即确定真北、磁北或者其他方向。
陀螺罗经在使用时,需要在水平位置下安装,通过自身的旋转来保持仪器的稳定性,并通过内置的陀螺仪来测量地球自转的轴线方向和速度。
在此基础上,陀螺罗经可以确定航向、速度、位置等信息。
陀螺罗经指北的原理就是利用陀螺仪的转动轴线与地球自转轴线之间的关系来确定真北方向,从而实现导航。
这是因为,地球自转的轴线是地球两端的南北极所连接的轴线,而陀螺仪的转动轴线与地球自转轴线相同,指向北极,因此可以用陀螺罗经来确定真北方向。
陀螺罗经的原理是基于惯性导航的,而惯性导航的基本原理是牛顿第一定律,也就是物体在没有受到力的作用下会保持静止或匀速直线运动的原理。
陀螺仪本身就具有惯性,它的转动惯性可以保证其稳定性,从而有效地测量地球的自转角速度。
因此,陀螺罗经可以准确地测量船舶或飞机在运动状态下的航向,为导航和飞行提供可靠的指引。
需要指出的是,陀螺罗经的指北原理只能确定真北方向,而不能确定磁北方向,
因为磁场的方向受到环境因素的影响,可能会发生变化。
因此,在实际应用中,需要将陀螺罗经的测量结果与其他仪器测量的磁场值进行比较,以确保导航的准确性。
总之,陀螺罗经的指北原理是基于惯性导航和地球自转的原理,通过测量陀螺仪的转动轴线来确定真北方向。
陀螺罗经在航海、航空等领域的应用,对于提高导航和飞行的精度和安全性具有重要意义。