03双转子陀螺罗经(安)
- 格式:pdf
- 大小:3.31 MB
- 文档页数:71

惯性导航技术发展综述学号:XXXXXXX ,姓名:XXX摘要:本文针对惯性导航系统,阐述了惯性导航的发展历程,并对惯性导航系统的原理进行了简要的说明。
同时,介绍了惯性导航系统中常用仪表的发展历史,以及惯性导航系统目前的发展趋势。
关键词:惯性导航系统、常用仪表、发展一.引言在各类导航系统中,惯性导航系统被认为是最重要的一种导航系统.惯性导航是以测量运动体加速度为基础的导航定位方法,测量到的加速度经过一次积分可以得到运动速度,经过二次积分可以得到运动距离,从而给出运动体的瞬时速度和位置数据。
这种不依赖外界信息,只靠载体自身的惯性测量来完成导航任务的技术也叫自主式导航.而惯性导航系统则是一种利用惯性敏感器件、基准方向及最初的位置信息来确定运载体在惯性空间中的位置、方向和速度的自主式导航系统,有时也简称为惯导。
由于惯导具有高度的自主性、隐蔽性以及信息的完备性等特点,随着国民经济建设与国防建设的发展,应用日益广泛。
目前惯性导航不仅应用于军事、工程和科学研究等领域,而且已扩展到民用领域,如石油钻井、大地测量、移动机器人等系统中。
随着现代科技的发展,惯性导航系统技术也得到了一些新的发展,如捷联式惯性导航系统、惯性导航敏感器件的发展等,这些新技术为惯导技术的发展注入了新的活力,推动着惯导技术的进一步发展。
本文针对惯性导航系统,介绍了它的发展历史和基本原理,以及与其相关的仪表陀螺仪、加速度计的发展历程,并对惯导系统目前的发展趋势进行了介绍。
二.惯性导航发展历程1930年以前的惯性技术被称为第一代惯性技术。
其包括了1687年牛顿提出的为惯性导航奠定了理论基础的力学三大定律;1852年,傅科根据欧拉和拉格朗日的刚体定点转动理论制造出的用于验证地球自转运动的测量装置;1908年安修茨研制出的世界上第一台摆式陀螺罗经;以及1923年的休拉摆原理。
第一代惯性技术为整个惯性导航发展奠定了基础.第二代惯性技术始于上世纪40年代火箭发展的初期,从二战期间,惯性技术在德国V—2火箭的制导上的首次应用;20世纪50年代麻省理工学院成功研制了单自由度液浮陀螺,并在B29飞机上成功应用;1958年鹦鹉螺号装备N6-A 和MK-19进行潜航并成功秘密到达目的地;到20世纪60年代,挠性陀螺研究的逐渐起步.这一时期,还出现了另一种惯性传感器-加速度计.另一方面,为提高陀螺仪表精度、减少误差,静电陀螺、磁悬浮陀螺和气浮陀螺概念被提出。
陀螺罗经常见问题1. 叙述陀螺仪的定义及其基本特性。
定义:工程上将高速旋转的对称刚体(转子)及其悬挂装置的总称叫做陀螺仪。
基本特性:定轴性、进动性2. 何谓平衡陀螺仪和自由陀螺仪?平衡陀螺仪:陀螺仪的中心和其几何中心相重合的陀螺仪。
自由陀螺仪:不受任何外力矩作用的平衡陀螺仪。
3. 位于地球上的自由陀螺仪的视运动有何规律?如何解释其物理实质?自由陀螺仪在地球上的视运动规律:北纬东偏、南纬西偏,(偏转角速度为ω2 )东升西降、南北一样(升降角速度为ω1y )物理实质:当地球自转时,在北纬子午面北点N 向西偏转,由于陀螺仪的定轴性,主轴空间指向不变,跟地球一起运动的观察者看到主轴北端在不断向东偏转。
同理在南纬,主轴指北端向西偏转。
当陀螺仪主轴指北端偏离子午面以东时,受ω1 的影响,水平面东半平面下降,陀螺仪主轴的指北端相对水平面产生上升的视运动;当陀螺仪主轴的指北端偏离子午面以西时,由于水平面西半平面上升,陀螺仪主轴则产生下降视运动。
4. 影响自由陀螺仪主轴不能稳定指北的主要矛盾是什么?克服该主要矛盾对自由陀螺仪影响的基本原则是什么?ω2 是影响自由陀螺仪主轴不能指北的主要矛盾。
克服该矛盾对自由陀螺仪影响的基本原则是利用陀螺仪的进动性,对陀螺仪水平轴施加一个外力 M ,使陀螺仪周周绕 OZ 轴进动。
5. 变自由陀螺仪为摆式罗经的两种方法。
第一种是重力下移法。
将陀螺仪的重心沿垂直轴下移,时重心不与支架中心O 重合,当主轴不水平时,产生控制力矩。
根据这种方法制成的罗经称为下重式罗经。
第二种是水银器法或液体连通器法。
在平衡陀螺仪上悬挂液体连通器,液体连通器中注入适量的高比重液体(如水银或其他化学溶剂),用以产生控制力矩。
这类罗经一般被称为水银器罗经或称液体连通器罗经。
6. 何谓水平轴阻尼法,它有何特点?水平轴阻尼法是指压缩椭圆长轴的方法,阻尼力矩应施加于陀螺仪的水平轴上。
特点:罗经稳定时主轴稳定在子午面内,但阻尼装置的结构比较复杂,控制力矩与阻尼力矩之间的相位关系很难严格做到恰好相差π /2, 所以阻尼效果会受到影响。
![陀螺仪原理[1]](https://uimg.taocdn.com/dc8a9b29915f804d2b16c14f.webp)
1)自由陀螺仪主轴不能指北的原因地球自转角速度的垂直分量w2使自由陀螺仪主轴相对子午面的视运动。
2)变自由陀螺仪为陀螺罗经的方法:控制力矩(controlling moment)(用My表示):为了克服由于地球自转角速度的垂直分量w2使自由陀螺仪主轴相对子午面的视运动,向陀螺仪施加的外力矩;控制力矩必须作用于陀螺仪的水平轴。
3)陀螺罗经获得控制力矩的方式按力矩的产生原理不同:直接产生法和间接产生法;按力矩的性质不同:重力控制力矩和电磁控制力矩;按力矩的产生方式不同:三大系列罗经的三种主要方式。
(1)安许茨系列罗经获得控制力矩的方式:将陀螺球重心下移的直接控制法获得控制力矩。
控制设备(controlling device):陀螺罗经产生控制力矩的设备(器件)。
陀螺球(gyrosphere):安许茨系列罗经是将双转子陀螺仪固定和密封在金属球内。
陀螺球具有主轴(ox轴)、水平轴(oy轴)和垂直轴(oz轴)。
陀螺球的重心G不在其中心O,而是沿垂直轴下移几毫米。
t = t1时,陀螺球位于A1处,此时主轴水平指东,q = 0,重力mg作用线通过陀螺仪中心O,重力mg不产生力矩(虽有力但力臂为零)。
t = t2时,随着地球自转,当,陀螺球位于A2处,此时主轴上升了一个q角(q ≠ 0),重力mg作用线不通过陀螺球中心O(有力臂a),重力mg的分力mgsinq 产生沿水平轴oy向的重力控制力矩My:My = mgsinq •a≈ mg a •q= M•qM = mga 最大控制力矩.控制力矩的大小与罗经结构参数和主轴高度角q 有关.控制力矩My使主轴产生进动速度u2,它使主轴正端自动找北(向子午面进动)。
根据赖柴尔定理:动量矩H矢端的线速度矢量u与外力矩矢量M大小相等方向相同:u = M陀螺罗经控制力矩My使罗经主轴产生的进动速度:u2= My = M•q安许茨系列罗经称为下重式陀螺罗经,控制力矩为重力力矩,属于机械摆式罗经。
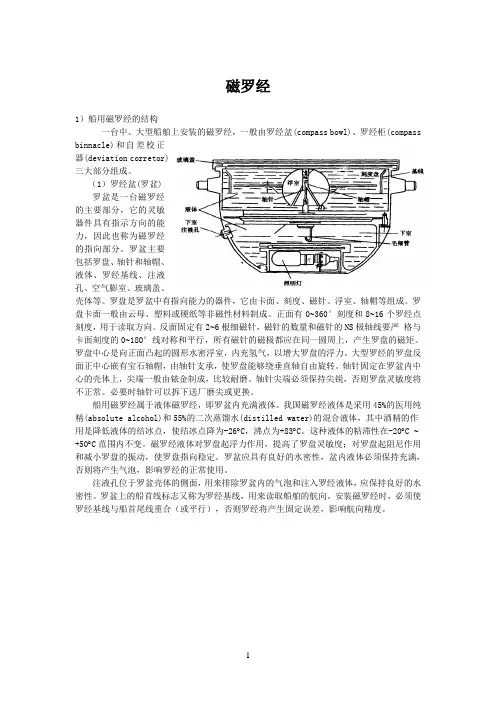
磁罗经1)船用磁罗经的结构一台中、大型船舶上安装的磁罗经,一般由罗经盆(compass bowl)、罗经柜(compass binnacle)和自差校正器(deviation corretor)三大部分组成。
(1)罗经盆(罗盆)罗盆是一台磁罗经的主要部分,它的灵敏器件具有指示方向的能力,因此也称为磁罗经的指向部分。
罗盆主要包括罗盘、轴针和轴帽、液体、罗经基线、注液孔、空气膨室、玻璃盖、壳体等。
罗盘是罗盆中有指向能力的器件,它由卡面、刻度、磁针、浮室、轴帽等组成。
罗盘卡面一般由云母、塑料或硬纸等非磁性材料制成。
正面有0~360°刻度和8~16个罗经点刻度,用于读取方向。
反面固定有2~6根细磁针,磁针的数量和磁针的NS极轴线要严格与卡面刻度的0~180°线对称和平行,所有磁针的磁极都应在同一圆周上,产生罗盘的磁矩。
罗盘中心是向正面凸起的圆形水密浮室,内充氢气,以增大罗盘的浮力。
大型罗经的罗盘反面正中心嵌有宝石轴帽,由轴针支承,使罗盘能够绕垂直轴自由旋转。
轴针固定在罗盆内中心的壳体上,尖端一般由铱金制成,比较耐磨。
轴针尖端必须保持尖锐,否则罗盘灵敏度将不正常。
必要时轴针可以拆下送厂磨尖或更换。
船用磁罗经属于液体磁罗经,即罗盆内充满液体。
我国磁罗经液体是采用45%的医用纯精(absolute alcohol)和55%的二次蒸馏水(distilled water)的混合液体,其中酒精的作用是降低液体的结冰点,使结冰点降为-26︒C,沸点为+83︒C。
这种液体的粘滞性在-20︒C ~ +50︒C范围内不变。
磁罗经液体对罗盘起浮力作用,提高了罗盘灵敏度;对罗盘起阻尼作用和减小罗盘的振动,使罗盘指向稳定。
罗盆应具有良好的水密性,盆内液体必须保持充满,否则将产生气泡,影响罗经的正常使用。
注液孔位于罗盆壳体的侧面,用来排除罗盆内的气泡和注入罗经液体,应保持良好的水密性。
罗盆上的船首线标志又称为罗经基线,用来读取船舶的航向。
20世纪70年代,伴随着光纤通信技术的发展,光纤传感技术也迅速发展起来。
该技术是以光波为载体,光纤为媒质,感应和传输外界被测量信号的新型传感技术,以独特的优良性能赢得极大的重视,并在各个领域中广泛应用。
光纤陀螺技术是光纤传感技术的一个特例,是利用光学传输特性而非转动部件来感应角速率和角偏差的惯性传感技术。
1 光纤陀螺的结构按照元器件类型,光纤陀螺分为分立元件型、集成光学型和全光纤型。
由于分立元件型光纤陀螺存在体积较大、可靠性较差、误差较大等缺点,现在世界各国都已停止发展。
集成光学型光纤陀螺将主要光学元件如耦合器、偏振器、调制器都集成在一块芯片上,将光纤线圈、光源、检测器接在芯片适当的位置,就构成了实用的集成光学型光纤陀螺。
从光纤陀螺的发展方向来看,集成光学型光纤陀螺是最有发展前途的光纤陀螺形式。
全光纤陀螺是将主要的光学元件都加工在一条保偏光纤上,从而可以避免因元器件连接造成的误差。
目前,全光纤陀螺技术比较成熟,其性能在三种中最好,适合在现阶段研制实用的商品光纤陀螺。
根据干涉型光纤陀螺的信号检测方式的不同,可以分为开环式和闭环式两大类。
开环式光纤陀螺直接检测干涉条纹的相移,因而动态范围较窄,检测精度较低。
闭环式系统采取相位补偿的方法,实时抵消萨格奈克相移,使陀螺始终工作在零相移状态,通过检测补偿相位移来测量角速度,其动态范围大,检测精度高。
此外,闭环式光纤陀螺对环境尤其是对振动不敏感,是研制高精度光纤陀螺仪的理想形式。
开环式全光纤陀螺是中低精度、低成本光纤陀螺中比较流行的结构。
目前,在中高精度光纤陀螺仪领域,最为流行的设计结构为全数字闭环式光纤陀螺仪。
光纤陀螺示意图2 光纤陀螺的特点光纤陀螺的主要特点是:①无运动部件,仪器牢固稳定,耐冲击且对加速度不敏感;②结构简单,零部件少,价格低廉;③启动时间短(原理上可瞬间启动);④检测灵敏度和分辨率极高;⑤可直接用数字输出并与计算机接口联网;⑥动态范围极宽;⑦寿命长,信号稳定可靠;⑧易于采用集成光路技术;⑨克服了因激光陀螺闭锁现象带来的负效应;⑩可与环形激光陀螺一起集成捷联式惯性系统传感器。
百度文库- 让每个人平等地提升自我安许茨(ANSCHUTZ)系列陀螺罗经1、罗经开机前的检查与准备(1)从罗经桌注液孔测量贮液缸液面高度,液面到注液孔上沿的距离不应大于4cm~5cm,否则液体数量不够,应添加液体。
(2)检查并调整各分罗经航向与主罗经航向相等。
(3)检查变压器箱上的“电源开关”和主罗经箱上的“随动开关”应放在“Off”位置。
(4)检查各接线板、插头插座、保险丝应无损坏并接触良好。
机械转动部分的转动应正常。
(5)检查并调整航向记录器的记录笔所在记录纸上的航向等于主罗经航向,时间等于船钟时间。
(6)检查主罗经及各分罗经的照明灯及调节应正常,并调节亮度适当。
2、开机步骤(1)接通变压器箱上的“电源开关(main witch)”。
(2)应做如下检查:(3)①三个三相电流指示灯应较亮;(4)②从罗经箱观测窗口观察陀螺球应开始缓慢转动,说明陀螺电机三相电已接通,陀螺球已工作。
(5)20min后,接通主罗经上的“随动开关(follow-up switch)”。
(6)应做如下检查:(7)①再次检查并调整分罗经航向与主罗经航向相等;(8)②约30min左右,三相电流指示灯亮度变暗,其中第一相电流指示灯最亮、第二相电流指示灯亮最暗、第三相电流指示灯亮度适中,说明三相电流已达到正常值;(9)③当支承液体温度达到52︒C,陀螺球稳定指北时,检查陀螺球高度应符合要求,检查陀螺球高度时罗经桌应水平。
3、罗经读数读出航向刻度盘上的航向数据(精确到0.5度)4、关机(1)关闭“随动开关”。
(2)关闭“电源开关”使用注意事项:(1)经常检查罗经的各项参数(三相和单相电压、三相电流、陀螺球高度、支承液体温度、支承液体液面高度、分罗经航向)均应正常。
(2)航行中若有速度误差,观测的航向和方位应通过查表计算消除速度误差。
(3)当报警器报警时,必须对支承液体采取降温措施。
当支承液体温度达到60︒C时,罗经已不能正常工作,应关闭罗经。
中文:航海仪器课程名称英文:Navigation Apparatus课程编号 1105300 学分/学时 3.5/60所属教研室航海教研室先修课程 高等数学、大学物理、理论力学、电路与电机、无线电技术等课程类型 专业课 考核方式 考试开课专业 航海技术专业教学目的和要求目的:本课程是航海技术专业的一门主干专业课。
其目的是使学生掌握正确使用航海仪器应具备的基本知识和技能,并通过国家海事局要求的《航海仪器的正确使用》评估项目和《航海学》考试。
要求:1、理解陀螺罗经和磁罗经的指北原理及其结构组成,掌握测定和校正仪器误差的方法,熟练掌握仪器的正确使用方法与保养工作。
2、掌握测深仪和计程仪的基本原理、正确使用方法与维护保养工作。
3、掌握罗兰C系统、GPS/DGPS卫星导航系统的组成、定位原理和定位精度,熟练掌握GPS 卫导仪和罗兰C接收机的正确使用方法。
4、掌握AIS系统的功能、组成与特点,并能正确使用AIS收发机。
5、了解VDR和组合导航系统的主要功能与特点等。
教学内容和基本要求(分章节)绪论第一章 陀螺罗经的指北原理第一节 陀螺仪及其特性第二节 陀螺仪在地球上的视运动第三节 变自由陀螺仪为陀螺罗经的方法第四节 摆式罗经的等幅摆动和减幅摆动第五节 电磁控制式罗经原理第六节 光纤陀螺罗经定向原理基本要求:正确理解陀螺罗经的指北原理。
本章重点:陀螺罗经的指北原理。
本章难点:陀螺罗经的指北原理。
教学内容及基本要求(分章节)第二章 陀螺罗经误差及其消除第一节 纬度误差第二节 速度误差第三节 冲击误差第四节 其它误差基本要求:掌握陀螺罗经的各种误差的定义、特点及其校正方法。
本章重点:陀螺罗经的各种误差的特点及其校正方法。
本章难点:陀螺罗经纬度误差、速度误差的原因分析。
第三章双转子陀螺罗经第一节 安许茨4型罗经概述、主罗经结构组成、使用与保养第二节 安许茨20型罗经第三节 北辰CMZ500型罗经基本要求:掌握安许茨罗经的主罗经结构组成及各主要部件的作用,能熟练使用安许茨4型陀螺罗经。