5_2、陀螺罗经
- 格式:doc
- 大小:814.50 KB
- 文档页数:36

罗经基础知识罗经是提供方向基准的仪器,船舶用以确定航向和观测物标方位。
那么你对罗经了解多少呢?以下是由店铺整理关于罗经知识的内容,希望大家喜欢!一、磁罗经发展历程利用自由支持的磁针在地磁作用下稳定指北的特性而制成的罗经。
磁罗经由中国的司南、指南针逐步发展而成。
司南为天然磁石制成的勺形物,投转于光滑的地盘上,停止时勺柄指南。
地盘四周刻有八卦和天干地支名称,用于表示方位(图1)。
已知关于司南的最早记述见于公元前3世纪战国末期的《韩非子·有度》。
宋朝初期出现了人工磁化的指南针,有水浮、丝悬、针顶等方法,近代磁罗经和地磁测量仪器仍沿用这些基本结构。
北宋沈括在《梦溪笔谈》(1063年)中描述了用磁石磨针锋制作指南针的方法,并记载了磁差的存在。
指南针是初级阶段的磁罗经,是中国古代四大发明之一。
唐宋时期中国海外贸易非常发达,大型商船远航到波斯湾、红海等地,造船和航海技术均居世界前列。
指南针应用于航海的最早记载见于北宋朱彧的《萍州可谈》(1119年),书中说:“舟师识地理,夜则观星,昼则观日,阴晦观指南针。
”用于航海的指南针又称罗盘。
明代铜制的水罗盘用八干、十二支、四维卦位名称标出二十四个方位(图2)。
通常认为罗盘是由中国传入阿拉伯,再传入欧洲,但有争论。
相传14世纪初南意大利阿玛尔菲人F.乔亚首先把纸罗经卡(即方向刻度盘)和磁针连接在一起转动。
这是磁罗经发展过程中的一次飞跃。
从此船舶变向就不必再用手转动罗盘了。
16世纪意大利人卡尔登制成平衡环,使磁罗经在船舶摇晃中也能保持水平。
18世纪初英国人E.哈利制成第一张世界等磁差曲线图。
铁船出现后,磁罗经产生了自差。
在此之前,关于自差现象的记述已见于明末清初方以智的《物理小识》,书中说到铁对磁针的干扰和海船不用铁钉的原因:“海咸烂铁,且妨磁也。
”19世纪上半叶英国人M.弗林德斯和G.B.艾里先后提出消除自差的方法,法国泊松对自差的数学理论作出了贡献。
19世纪70年代英国物理学家W.汤姆森制成稳定性好的干罗经安装于有类似现代自差校正器的罗经柜中,曾被英海军作为标准装备。

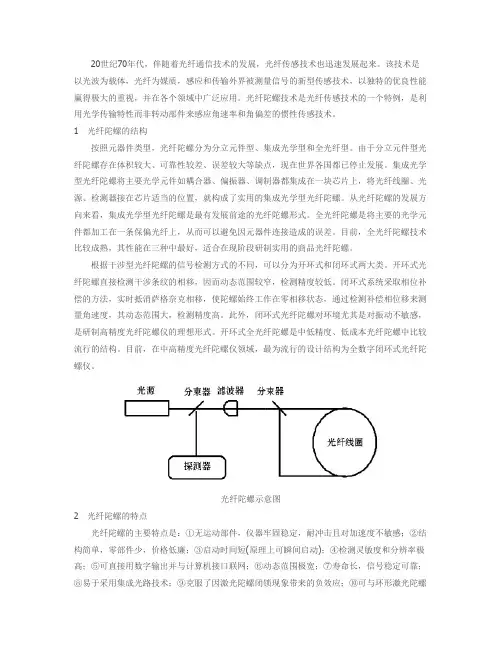
20世纪70年代,伴随着光纤通信技术的发展,光纤传感技术也迅速发展起来。
该技术是以光波为载体,光纤为媒质,感应和传输外界被测量信号的新型传感技术,以独特的优良性能赢得极大的重视,并在各个领域中广泛应用。
光纤陀螺技术是光纤传感技术的一个特例,是利用光学传输特性而非转动部件来感应角速率和角偏差的惯性传感技术。
1 光纤陀螺的结构按照元器件类型,光纤陀螺分为分立元件型、集成光学型和全光纤型。
由于分立元件型光纤陀螺存在体积较大、可靠性较差、误差较大等缺点,现在世界各国都已停止发展。
集成光学型光纤陀螺将主要光学元件如耦合器、偏振器、调制器都集成在一块芯片上,将光纤线圈、光源、检测器接在芯片适当的位置,就构成了实用的集成光学型光纤陀螺。
从光纤陀螺的发展方向来看,集成光学型光纤陀螺是最有发展前途的光纤陀螺形式。
全光纤陀螺是将主要的光学元件都加工在一条保偏光纤上,从而可以避免因元器件连接造成的误差。
目前,全光纤陀螺技术比较成熟,其性能在三种中最好,适合在现阶段研制实用的商品光纤陀螺。
根据干涉型光纤陀螺的信号检测方式的不同,可以分为开环式和闭环式两大类。
开环式光纤陀螺直接检测干涉条纹的相移,因而动态范围较窄,检测精度较低。
闭环式系统采取相位补偿的方法,实时抵消萨格奈克相移,使陀螺始终工作在零相移状态,通过检测补偿相位移来测量角速度,其动态范围大,检测精度高。
此外,闭环式光纤陀螺对环境尤其是对振动不敏感,是研制高精度光纤陀螺仪的理想形式。
开环式全光纤陀螺是中低精度、低成本光纤陀螺中比较流行的结构。
目前,在中高精度光纤陀螺仪领域,最为流行的设计结构为全数字闭环式光纤陀螺仪。
光纤陀螺示意图2 光纤陀螺的特点光纤陀螺的主要特点是:①无运动部件,仪器牢固稳定,耐冲击且对加速度不敏感;②结构简单,零部件少,价格低廉;③启动时间短(原理上可瞬间启动);④检测灵敏度和分辨率极高;⑤可直接用数字输出并与计算机接口联网;⑥动态范围极宽;⑦寿命长,信号稳定可靠;⑧易于采用集成光路技术;⑨克服了因激光陀螺闭锁现象带来的负效应;⑩可与环形激光陀螺一起集成捷联式惯性系统传感器。
陀螺罗经的指北原理
陀螺罗经是一种用来确定地理位置和方向的仪器,它可以通过测量地球上的自转轴方向来确定真北方向。
陀螺罗经是一项高精度的仪器,在航海、航空和科学研究中被广泛应用。
指北原理是陀螺罗经的核心原理,指北就是确定方向,即确定真北、磁北或者其他方向。
陀螺罗经在使用时,需要在水平位置下安装,通过自身的旋转来保持仪器的稳定性,并通过内置的陀螺仪来测量地球自转的轴线方向和速度。
在此基础上,陀螺罗经可以确定航向、速度、位置等信息。
陀螺罗经指北的原理就是利用陀螺仪的转动轴线与地球自转轴线之间的关系来确定真北方向,从而实现导航。
这是因为,地球自转的轴线是地球两端的南北极所连接的轴线,而陀螺仪的转动轴线与地球自转轴线相同,指向北极,因此可以用陀螺罗经来确定真北方向。
陀螺罗经的原理是基于惯性导航的,而惯性导航的基本原理是牛顿第一定律,也就是物体在没有受到力的作用下会保持静止或匀速直线运动的原理。
陀螺仪本身就具有惯性,它的转动惯性可以保证其稳定性,从而有效地测量地球的自转角速度。
因此,陀螺罗经可以准确地测量船舶或飞机在运动状态下的航向,为导航和飞行提供可靠的指引。
需要指出的是,陀螺罗经的指北原理只能确定真北方向,而不能确定磁北方向,
因为磁场的方向受到环境因素的影响,可能会发生变化。
因此,在实际应用中,需要将陀螺罗经的测量结果与其他仪器测量的磁场值进行比较,以确保导航的准确性。
总之,陀螺罗经的指北原理是基于惯性导航和地球自转的原理,通过测量陀螺仪的转动轴线来确定真北方向。
陀螺罗经在航海、航空等领域的应用,对于提高导航和飞行的精度和安全性具有重要意义。
陀螺罗经第一章 陀螺罗经指北原理陀螺罗经是船舶上指示方向的航海仪器。
其基本原理是把陀螺仪的特性和地球自转运动联系起来,自动地找北和指北。
描述陀螺罗经指北原理所涉及的内容用式(1-1)表示:陀螺罗经=陀螺仪+地球自转+控制设备+阻尼设备 (1-1)第一节 陀螺仪及其特性一. 陀螺仪的定义与结构凡是能绕回转体的对称轴高速旋转的刚体都可称为陀螺。
所谓回转体是物体相对于对称轴的质量分布有一定的规律,是对称的。
常见的陀螺是一个高速旋转的转子。
回转体的对称轴叫做陀螺转子主轴,或称极轴。
转子绕这个轴的旋转称为陀螺转子的自转。
陀螺转子主轴相当于一个指示方向的指针,如果这个指针能够稳定地指示真北,陀螺仪就成为了陀螺罗经。
如图1-1所示,一个陀螺用一个内环(视其水平放置,也可称水平环)支承起来,在自转轴(主轴)水平面内,与主轴相垂直的方向上,用水平轴将内环支承在外环(垂直环)上,而外环则用与水平轴相垂直的垂直轴支承在固定环及基座上。
把高速旋转的陀螺安装在这样一个悬挂装置上,使陀螺主轴在空间具有一个或两个转动自由度,就构成了陀螺仪。
可以看出高速旋转的转子及其支承系统是构成陀螺仪的两个要素。
实用罗经中,陀螺仪转子的转速都是每分钟几千转到每分钟几万转。
陀螺仪的支承系统应具有这样的特点,即它应保证主轴在方位上指任何方向,在高度上指示任何高度,总之,能指空间任何方向。
由此,我们可以将陀螺仪概述为:陀螺转子借助于悬挂装置可使其主轴指空间任意方向,这种仪器就叫陀螺仪。
实用陀螺仪,其转子、内环及外环等相对主轴、水平轴以及垂直轴都是对称的,无论几何形体或质量都是对称的。
重心与几何中心相重合的陀螺仪称为平衡陀螺仪。
不受任何外力矩作用的陀螺仪称为自由陀螺仪。
工程上应用的都是自由陀螺仪。
陀螺仪的转子能绕一个轴旋转,它就具备了一个旋转自由,也就是具有一个自由度。
像图1-1所示的陀螺仪,1-转子;2-内环;3-外环;4-固定环;5-基座图1-1具有三个自由度,一是转子绕O X轴作自转运动,一是转子连同内环绕OY轴(水平轴)转动,一是转子连同内环和外环绕OZ轴(垂直轴)转动。
常用术语及其缩写符号
序号 术 语 代
号
序
号
术 语 代
号
序
号
术 语 代
号
1 观测纬度 ф。
1
2 陀螺罗经航向 GC 2
3 大圆改正量 Ψ
2 观测经度 λ 。
1
3 真方位 TB 2
4 风压差 α
3 推算纬度 Ф c 1
4 罗经方位 CB 2
5 流压差 β
4 推算经度 λc 1
5 陀螺罗经方位 GB 2
6 风流合压差 γ
5 北 N 1
6 无线电真方位 DB 2
7 计程仪读数 L
6 南 S 1
7 磁差 Var 2
8 计程仪改正率 ΔL(%)
7 东 E 18 自差 Dev 29 物标距离 D
8 西 W 19 罗经差 ΔC 30 物标正横距离 D^
“中国海员之家”网站(http://www.seaman )搜集整理,四分之一船长@中国海员之家网站制作。
9 计划航向 C 20 陀螺罗经改正量 GE 31 位移差 ΔP
10 真航向 TC 21 舷角 θ 32 航速 V
11 罗经航向 CC 22 无线电自差 f
“中国海员之家”网站(http://www.seaman )搜集整理,四分之一船长@中国海员之家网站制作。
陀螺罗经的工作原理陀螺罗经,也被称为转轮罗经,是一种古老的精密仪器,它被用来测量海洋中的指南针方位、经纬度和地磁强度。
它几乎可以说是现代航海技术的开端。
那么,陀螺罗经是如何运行的呢?首先,陀螺罗经的工作原理基于物理学的一般原理,也就是“物体施加外力时会进行自转的运动”,这也就是物体自转的原理。
在陀螺罗经中,外力可以是引力、磁力、涡流或流体力等,这些外力会引起陀螺罗经内部的“重力梁”和“磁力力矩”的动作,这样,陀螺罗经就自动开始旋转,从而测量出海洋中的指南针方位、经纬度和地磁强度。
在陀螺罗经的结构中,表面有一个梯形的重力梁,它是由三个相互垂直的支撑形成的,它们之间的间隙可以改变,也就是说它们可以在重力的作用下移动,而且这种移动是有一定规律的。
通过改变间隙,重力梁就会发生偏转,产生相应的力矩,使陀螺罗经能按照一定的规律旋转。
在此拉力的作用下,陀螺罗经可以按照顺时针或逆时针的方向旋转,这种旋转的运动是可以持续的,因此,它能按照一定的规律测量海洋中的指南针方位、经纬度和地磁强度。
此外,陀螺罗经还可以通过磁力力矩来进行测量,原理与前述基于重力梁运动的原理类似,只是在这种情况下,磁力梁就是陀螺罗经的磁力力矩,它是由一个由金属片组成的旋转轴组成,这个轴可以受到外界磁场的影响,当该轴受到磁场的作用时,它就会旋转,产生力矩,引起陀螺罗经的旋转,从而测量出海洋中的指南针方位、经纬度和地磁强度。
由于陀螺罗经内部有重力力矩和磁力力矩的作用,所以,陀螺罗经能够按照一定的规律运行,不受外界条件的影响,这样就能够准确测量出各种复杂的海洋方位和经纬度。
另外,陀螺罗经的精度很高,它所测量出的结果准确可靠,而且操作简单,能在复杂的海洋环境中运行。
由此可见,陀螺罗经的原理和结构极其复杂,但它的使用却非常的方便,也被用来帮助航海家及其他海洋研究者准确的确定航行的方位和位置,并为现代航海技术的发展做出了重大的贡献。