第二章陀螺罗经误差
- 格式:ppt
- 大小:259.00 KB
- 文档页数:32

第二节陀螺罗经概述1.发展法国物理学家列昂.福科(Leon Foucault) 1852年提出的陀螺指向理论;现代船舶上普遍使用的陀螺罗经于本世纪初研制成功的船舶指向仪器。
1908年德国生产出了安许茨型陀螺罗经(ANSCHÜTZ gyrocompass);1911年美国生产出了斯伯利型陀螺罗经(SPERRY gyrocompass);1916年英国生产出了勃朗型陀螺罗经(BROWN gyrocompass)。
2.分类近百年,生产出了近百种型号的陀螺罗经,主要分为三大系列或两大类型。
按照结构特点和工作原理分为三大系列:即安许茨系列;斯伯利系列;阿玛-勃朗系列。
按照灵敏部分转子个数分为两大类型:即单转子陀螺罗经和双转子陀螺罗经。
按照控制力矩的性质分为两大类型:机械摆式陀螺罗经和电磁控制式陀螺罗经。
按照阻尼方式分两大类型:水平轴阻尼陀螺罗经和垂直轴阻尼陀螺罗经。
3.与磁罗经相比较,陀螺罗经的主要优缺点主要优点:指向精度高;多个复示器,有利于船舶自动化;不受磁干扰影响,指向误差小;安装位置不受限制等。
主要缺点:必须有电源才能工作(可靠性较差);工作原理、结构复杂。
4.发展趋势体积小型化;广泛采用先进技术;提高指向可靠性和使用寿命;简化维护保养。
一、陀螺罗经指北原理1.自由陀螺仪及其特性1)自由陀螺仪(free gyroscope)定义陀螺仪从广义讲就是一种能绕定点高速旋转的对称刚体。
实用陀螺仪是高速旋转的对称刚体及其悬挂装置的总称。
按其悬挂装置不同分为单自由度陀螺仪(single-degree of freedom gyro.)、二自由度陀螺仪(two-degree of freedom gyro.)和三自由度陀螺仪(three-degree of freedom gyro.)。
平衡陀螺仪(balanced gyroscope):若陀螺仪的重心(G)与中心(O)重合。
自由陀螺仪:重心(G)与中心(O)重合,不受任何外力矩作用的三自由度平衡陀螺仪。
第一章 陀螺罗经误差及其消除陀螺罗经的主轴在方位上偏离地理真北方向的角度称为陀螺罗经误差。
陀螺罗经误差也是船舶真航向与陀螺罗经航向之间的差值或真北与陀螺罗经北之间的差角。
陀螺罗经误差有纬度误差、速度误差、冲击误差、摇摆误差和基线误差。
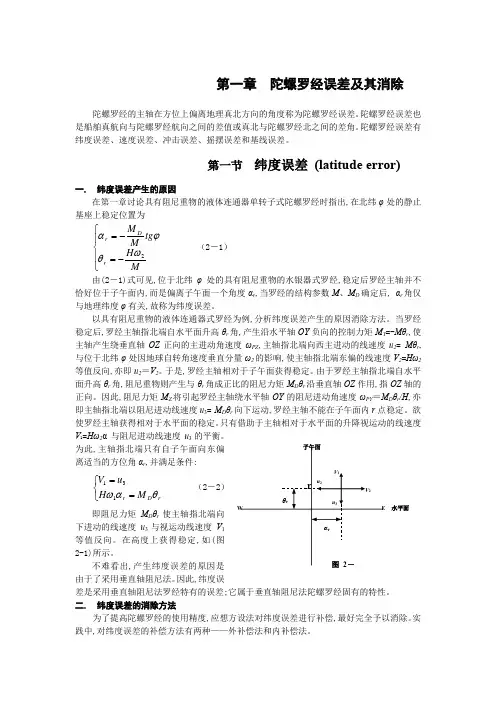
第一节 纬度误差 (latitude error)一. 纬度误差产生的原因在第一章讨论具有阻尼重物的液体连通器单转子式陀螺罗经时指出,在北纬φ处的静止基座上稳定位置为⎪⎩⎪⎨⎧-=-=M H tg M M r D r 2ωθϕα (2-1) 由(2-1)式可见,位于北纬φ处的具有阻尼重物的水银器式罗经,稳定后罗经主轴并不恰好位于子午面内,而是偏离子午面一个角度αr ,当罗经的结构参数M 、M D 确定后, αr 角仅与地理纬度φ有关,故称为纬度误差。
以具有阻尼重物的液体连通器式罗经为例,分析纬度误差产生的原因消除方法。
当罗经稳定后,罗经主轴指北端自水平面升高θr 角,产生沿水平轴OY 负向的控制力矩M Y =-Mθr ,使主轴产生绕垂直轴OZ 正向的主进动角速度ωPZ ,主轴指北端向西主进动的线速度u 2= Mθr ,与位于北纬φ处因地球自转角速度垂直分量ω2的影响,使主轴指北端东偏的线速度V 2=Hω2等值反向,亦即u 2=V 2。
于是,罗经主轴相对于子午面获得稳定。
由于罗经主轴指北端自水平面升高θr 角,阻尼重物则产生与θr 角成正比的阻尼力矩M D θr 沿垂直轴OZ 作用,指OZ 轴的正向。
因此,阻尼力矩M Z 将引起罗经主轴绕水平轴OY 的阻尼进动角速度ωPY =M D θr /H ,亦即主轴指北端以阻尼进动线速度u 3= M D θr 向下运动,罗经主轴不能在子午面内r 点稳定。
欲使罗经主轴获得相对于水平面的稳定。
只有借助于主轴相对于水平面的升降视运动的线速度V 1=Hω2α与阻尼进动线速度u 3的平衡。
为此,主轴指北端只有自子午面向东偏离适当的方位角αr ,并满足条件:⎩⎨⎧==r D r M H u V θαω131 (2-2) 即阻尼力矩M D θr 使主轴指北端向下进动的线速度u 3与视运动线速度V 1等值反向。

目录第一篇船用陀螺罗经第一章陀螺罗经指北原理 (1)第一节陀螺仪及其特性 (1)第二节自由陀螺仪在地球上的视运动 (7)第三节变自由陀螺仪为陀螺罗经的方法 (9)第四节摆式罗经等幅摆动和减幅摆动 (14)第五节电磁控制式陀螺罗经 (20)第六节光纤陀螺罗经 (21)第二章陀螺罗经误差及其消除 (24)第一节纬度误差(latitude error) (24)第二节速度误差(speed error) (25)第三节冲击误差(ballistic error) (28)第四节其他误差 (30)第五章磁罗经第一节磁的基本概念 (61)第二节船用磁罗经 (64)第三节磁罗经的检查、保管与安装 (66)第四节船正平时的自差理论 (68)第五节倾斜自差理论 (75)第六节罗经自差校正 (77)第七节自差的测定和自差表计算 (83)第二篇水声导航仪器第六章回声测深仪 (86)第一节水声学基础 (86)第二节回声测深仪原理 (87)第三节回声测深仪误差 (89)第四节IES-10型回声测深仪 (91)第七章船用计程仪 (94)第一节电磁计程仪 (94)第二节多普勒计程仪 (96)第三节声相关计程仪 (99)第一篇 船用陀螺罗经第一章 陀螺罗经指北原理陀螺罗经是船舶上指示方向的航海仪器。
其基本原理是把陀螺仪的特性和地球自转运动联系起来,自动地找北和指北。
描述陀螺罗经指北原理所涉及的内容用式(1-1)表示:陀螺罗经=陀螺仪+地球自转+控制设备+阻尼设备 (1-1)第一节 陀螺仪及其特性一. 陀螺仪的定义与结构凡是能绕回转体的对称轴高速旋转的刚体都可称为陀螺。
所谓回转体是物体相对于对称轴的质量分布有一定的规律,是对称的。
常见的陀螺是一个高速旋转的转子。
回转体的对称轴叫做陀螺转子主轴,或称极轴。
转子绕这个轴的旋转称为陀螺转子的自转。
陀螺转子主轴相当于一个指示方向的指针,如果这个指针能够稳定地指示真北,陀螺仪就成为了陀螺罗经。
目录第一篇船用陀螺罗经第一章陀螺罗经指北原理 (1)第一节陀螺仪及其特性 (1)第二节自由陀螺仪在地球上的视运动 (7)第三节变自由陀螺仪为陀螺罗经的方法 (9)第四节摆式罗经等幅摆动和减幅摆动 (14)第五节电磁控制式陀螺罗经 (20)第六节光纤陀螺罗经 (21)第二章陀螺罗经误差及其消除 (24)第一节纬度误差(latitude error) (24)第二节速度误差(speed error) (25)第三节冲击误差(ballistic error) (28)第四节其他误差 (30)第五章磁罗经第一节磁的基本概念 (61)第二节船用磁罗经 (64)第三节磁罗经的检查、保管与安装 (66)第四节船正平时的自差理论 (68)第五节倾斜自差理论 (75)第六节罗经自差校正 (77)第七节自差的测定和自差表计算 (83)第二篇水声导航仪器第六章回声测深仪 (86)第一节水声学基础 (86)第二节回声测深仪原理 (87)第三节回声测深仪误差 (89)第四节IES-10型回声测深仪 (91)第七章船用计程仪 (94)第一节电磁计程仪 (94)第二节多普勒计程仪 (96)第三节声相关计程仪 (99)第一篇 船用陀螺罗经第一章 陀螺罗经指北原理陀螺罗经是船舶上指示方向的航海仪器。
其基本原理是把陀螺仪的特性和地球自转运动联系起来,自动地找北和指北。
描述陀螺罗经指北原理所涉及的内容用式(1-1)表示:陀螺罗经=陀螺仪+地球自转+控制设备+阻尼设备 (1-1)第一节 陀螺仪及其特性一. 陀螺仪的定义与结构凡是能绕回转体的对称轴高速旋转的刚体都可称为陀螺。
所谓回转体是物体相对于对称轴的质量分布有一定的规律,是对称的。
常见的陀螺是一个高速旋转的转子。
回转体的对称轴叫做陀螺转子主轴,或称极轴。
转子绕这个轴的旋转称为陀螺转子的自转。
陀螺转子主轴相当于一个指示方向的指针,如果这个指针能够稳定地指示真北,陀螺仪就成为了陀螺罗经。
航海学仪器部分新加题2011年航海仪器补充题库部分第一章第一节陀螺罗经指北原理第二节陀螺罗经误差291. 高速旋转的三自由度陀螺仪其进动性是如何描述的?1.CA.在外力的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力方向B.在外力矩的作用下,陀螺仪主轴的动量矩矢端力图保持其初始方位不变C.在外力矩的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力矩D.在外力矩的作用下,陀螺仪主轴即能自动找北指北2. 三自由度陀螺仪的转子高速旋转时,其主轴将指向______,若在垂直主轴方向上加外力矩,主轴将______。
2.AA.空间某一方向,产生进动B.真北,指向真北C.空间某一方向,保持指向不变D.罗北,保持指向不变3. 若在南纬,陀螺仪主轴作视运动,则:3.CA.主轴视运动的角速度等于地球自转角速度B.主轴指北端向东偏离子午面后又相对水平面上升C.主轴指北端向西偏离子午面后又相对水平面下降D.主轴指北端每24小时水平旋转一周4. 要完成指向功能,陀螺罗经的灵敏部分通常由______部分组成。
Ⅰ、陀螺仪;Ⅱ、陀螺仪的控制设备;Ⅲ、陀螺仪的阻尼设备 4.D A.Ⅱ、ⅢB.Ⅰ、ⅡC.Ⅰ、ⅢD.Ⅰ、Ⅱ、Ⅲ5. 在北纬,船用陀螺罗经在稳定位置时,其主轴要在水平面之上有一高度角,主要用于产生______。
5.AA.控制力矩B.阻尼力矩C.动量矩D.以上均错6. 下重式陀螺罗经在起动过程中,当主轴指北端向子午面靠拢时,阻尼力矩起到______的作用。
6.AA.增进其靠拢B.阻止其靠拢C.不起作用D.以上都不对7. 下重式陀螺罗经在起动过程中,当主轴指北端向子午面远离时,阻尼力矩起到______的作用。
7.BA.增进其远离B.阻止其远离C.不起作用D.以上都不对8. 液体连通器式陀螺罗经在起动过程中,当主轴指北端向水平面远离时,阻尼力矩起到______的作用。
8.BA.增进其远离B.阻止其远离C.不起作用D.以上都不对9. 在南纬静止基座上,下重式罗经主轴指北端的稳定位置是: 9.BA.子午面之内,水平面之上B.子午面内,水平面之下C.子午面之东,水平面之上D.子午面之西,水平面之下10. 位于北纬某处静止基座上的斯伯利37型罗经,其主轴的稳定位置为: 10.AA.子午面之东,水平面之上B.子午面之东,水平面之下C.子午面之西,水平面之上D.子午面之西,水平面之下11. 船舶停靠在码头上,从开始启动安修茨4型罗经到其稳定后,航向记录器所记录的一条曲线可以称为:11.CA.等幅椭圆线B.收敛螺旋线C.阻尼摆动曲线D.正弦曲线12. 根据《海船航行设备规范》的要求,陀螺罗经自起动至稳定指北的时间不应大于______小时。
中文:航海仪器课程名称英文:Navigation Apparatus课程编号 1105300 学分/学时 3.5/60所属教研室航海教研室先修课程 高等数学、大学物理、理论力学、电路与电机、无线电技术等课程类型 专业课 考核方式 考试开课专业 航海技术专业教学目的和要求目的:本课程是航海技术专业的一门主干专业课。
其目的是使学生掌握正确使用航海仪器应具备的基本知识和技能,并通过国家海事局要求的《航海仪器的正确使用》评估项目和《航海学》考试。
要求:1、理解陀螺罗经和磁罗经的指北原理及其结构组成,掌握测定和校正仪器误差的方法,熟练掌握仪器的正确使用方法与保养工作。
2、掌握测深仪和计程仪的基本原理、正确使用方法与维护保养工作。
3、掌握罗兰C系统、GPS/DGPS卫星导航系统的组成、定位原理和定位精度,熟练掌握GPS 卫导仪和罗兰C接收机的正确使用方法。
4、掌握AIS系统的功能、组成与特点,并能正确使用AIS收发机。
5、了解VDR和组合导航系统的主要功能与特点等。
教学内容和基本要求(分章节)绪论第一章 陀螺罗经的指北原理第一节 陀螺仪及其特性第二节 陀螺仪在地球上的视运动第三节 变自由陀螺仪为陀螺罗经的方法第四节 摆式罗经的等幅摆动和减幅摆动第五节 电磁控制式罗经原理第六节 光纤陀螺罗经定向原理基本要求:正确理解陀螺罗经的指北原理。
本章重点:陀螺罗经的指北原理。
本章难点:陀螺罗经的指北原理。
教学内容及基本要求(分章节)第二章 陀螺罗经误差及其消除第一节 纬度误差第二节 速度误差第三节 冲击误差第四节 其它误差基本要求:掌握陀螺罗经的各种误差的定义、特点及其校正方法。
本章重点:陀螺罗经的各种误差的特点及其校正方法。
本章难点:陀螺罗经纬度误差、速度误差的原因分析。
第三章双转子陀螺罗经第一节 安许茨4型罗经概述、主罗经结构组成、使用与保养第二节 安许茨20型罗经第三节 北辰CMZ500型罗经基本要求:掌握安许茨罗经的主罗经结构组成及各主要部件的作用,能熟练使用安许茨4型陀螺罗经。