现代控制理论讲稿01
- 格式:pdf
- 大小:9.37 MB
- 文档页数:13


第一章绪言1-1 自动控制发展历史简介自动控制思想及其实践可以说历史悠久。
它是人类在认识世界和改造世界的过程中产生的,并随着社会的发展和科学水平的进步而不断发展。
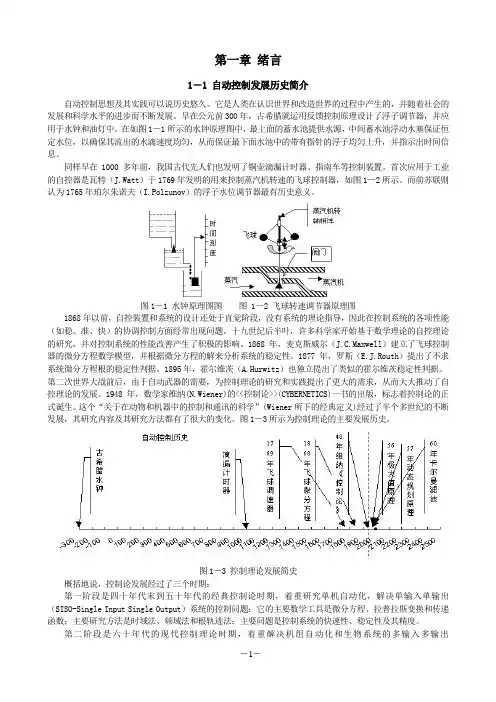
早在公元前300年,古希腊就运用反馈控制原理设计了浮子调节器,并应用于水钟和油灯中。
在如图1-1所示的水钟原理图中,最上面的蓄水池提供水源,中间蓄水池浮动水塞保证恒定水位,以确保其流出的水滴速度均匀,从而保证最下面水池中的带有指针的浮子均匀上升,并指示出时间信息。
同样早在1000多年前,我国古代先人们也发明了铜壶滴漏计时器、指南车等控制装置。
首次应用于工业的自控器是瓦特(J.Watt)于1769年发明的用来控制蒸汽机转速的飞球控制器,如图1-2所示。
而前苏联则认为1765年珀尔朱诺夫(I.Polzunov)的浮子水位调节器最有历史意义。
图1-1 水钟原理图图图 1-2 飞球转速调节器原理图1868年以前,自控装置和系统的设计还处于直觉阶段,没有系统的理论指导,因此在控制系统的各项性能(如稳、准、快)的协调控制方面经常出现问题。
十九世纪后半叶,许多科学家开始基于数学理论的自控理论的研究,并对控制系统的性能改善产生了积极的影响。
1868年,麦克斯威尔(J.C.Maxwell)建立了飞球控制器的微分方程数学模型,并根据微分方程的解来分析系统的稳定性。
1877年,罗斯(E.J.Routh)提出了不求系统微分方程根的稳定性判据。
1895年,霍尔维茨(A.Hurwitz)也独立提出了类似的霍尔维茨稳定性判据。
第二次世界大战前后,由于自动武器的需要,为控制理论的研究和实践提出了更大的需求,从而大大推动了自控理论的发展。
1948年,数学家维纳(N.Wiener)的<<控制论>>(CYBERNETICS)一书的出版,标志着控制论的正式诞生。
这个“关于在动物和机器中的控制和通讯的科学”(Wiener所下的经典定义)经过了半个多世纪的不断发展,其研究内容及其研究方法都有了很大的变化。
![现代控制理论[001].pptx](https://uimg.taocdn.com/853ad892376baf1ffd4fada5.webp)
《现代控制理论》教案大纲第一章:现代控制理论概述1.1 控制理论的发展历程1.2 现代控制理论的基本概念1.3 现代控制理论的应用领域1.4 本章小结第二章:线性系统的状态空间表示2.1 状态空间的概念2.2 线性系统的状态空间表示2.3 状态方程和输出方程2.4 本章小结第三章:线性系统的稳定性分析3.1 系统稳定性的概念3.2 线性系统的稳定性条件3.3 劳斯-赫尔维茨稳定判据3.4 奈奎斯特稳定判据3.5 本章小结第四章:线性系统的控制器设计4.1 控制器设计的目标4.2 比例积分微分控制器(PID控制器)4.3 状态反馈控制器4.4 观测器设计4.5 本章小结第五章:非线性系统的控制5.1 非线性系统的基本概念5.2 非线性系统的状态空间表示5.3 非线性系统的稳定性分析5.4 非线性控制器设计方法5.5 本章小结第六章:采样控制系统6.1 采样控制理论的基本概念6.2 采样控制系统的数学模型6.3 采样控制系统的稳定性分析6.4 采样控制系统的控制器设计6.5 本章小结第七章:数字控制系统7.1 数字控制系统的组成与特点7.2 数字控制器的原理与设计7.3 数字控制系统的稳定性分析7.4 数字控制系统的仿真与实现7.5 本章小结第八章:现代控制方法8.1 模糊控制理论8.2 自适应控制理论8.3 神经网络控制理论8.4 智能控制理论8.5 本章小结第九章:现代控制理论在工程应用中的实例分析9.1 工业控制系统中的应用9.2 航空航天领域的应用9.3 交通运输领域的应用9.4 生物医学领域的应用9.5 本章小结第十章:现代控制理论的发展趋势与展望10.1 控制理论研究的新领域10.2 控制理论在新技术中的应用10.3 控制理论的发展前景10.4 本章小结重点和难点解析一、现代控制理论概述难点解析:理解控制理论的演变过程,掌握现代控制理论的核心思想。
二、线性系统的状态空间表示难点解析:理解状态空间的物理意义,熟练运用状态空间表示线性系统。
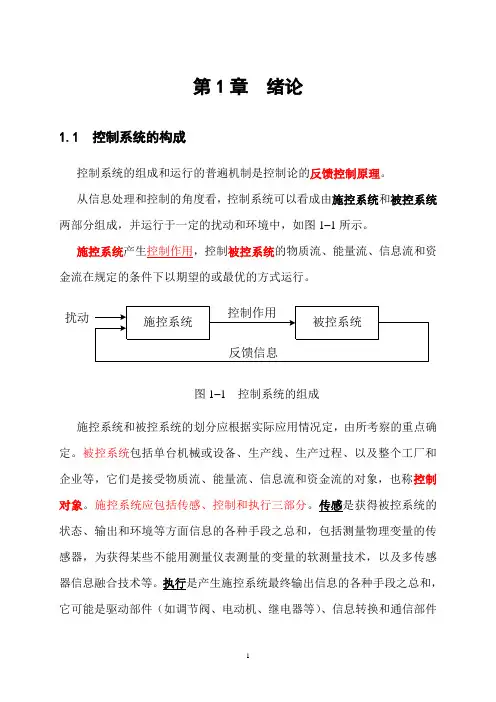
第1章绪论1.1 控制系统的构成控制系统的组成和运行的普遍机制是控制论的反馈控制原理。
从信息处理和控制的角度看,控制系统可以看成由施控系统和被控系统两部分组成,并运行于一定的扰动和环境中,如图1–1所示。
施控系统产生控制作用,控制被控系统的物质流、能量流、信息流和资金流在规定的条件下以期望的或最优的方式运行。
扰动图1–1 控制系统的组成施控系统和被控系统的划分应根据实际应用情况定,由所考察的重点确定。
被控系统包括单台机械或设备、生产线、生产过程、以及整个工厂和企业等,它们是接受物质流、能量流、信息流和资金流的对象,也称控制对象。
施控系统应包括传感、控制和执行三部分。
传感是获得被控系统的状态、输出和环境等方面信息的各种手段之总和,包括测量物理变量的传感器,为获得某些不能用测量仪表测量的变量的软测量技术,以及多传感器信息融合技术等。
执行是产生施控系统最终输出信息的各种手段之总和,它可能是驱动部件(如调节阀、电动机、继电器等)、信息转换和通信部件(如与下级计算机的接口)、显示、记录以及图、文、声、多媒体输出部件等。
控制则以计算机为主体,完成控制问题的求解,形成控制算法和控制策略,产生控制规律,它是控制系统的核心。
抽象化后的控制系统结构如图1–2所示。
图1–2 控制系统结构当着重研究控制策略而不关心信息的获取以及控制输出的实现时,将传感简化为求差器,将控制、执行合称控制器,如图1–3所示。
控制策略(狭义也称控制算法)是控制器的核心,是控制理论研究的重点。
图1–3 简化的控制系统1.2 控制理论发展简况在工业应用和理论研究中,控制理论的发展过程大体上可分为三个阶段:经典控制理论、现代控制理论及智能控制理论。
这种阶段性的发展过程是由简单到复杂、由量变到质变的辩证发展过程,是现代科学技术迅速发展对自动控制的程度、精度、范围及其适应能力的需求越来越高,从而推动控制理论发展的结果。
理论来源于实践,反过来指导实践,控制理论的发展过程证明了这个真理。
《现代控制理论》教案大纲第一章:绪论1.1 课程背景与意义1.2 控制系统的基本概念1.3 控制理论的发展历程1.4 控制理论的应用领域第二章:控制系统数学模型2.1 连续控制系统数学模型2.2 离散控制系统数学模型2.3 状态空间描述2.4 系统矩阵的性质与运算第三章:线性系统的时域分析3.1 系统的稳定性3.2 系统的瞬时性3.3 系统的稳态性能3.4 系统的动态性能第四章:线性系统的频域分析4.1 频率响应的概念4.2 频率响应的性质4.3 系统频率响应的求取方法4.4 系统频域性能指标第五章:线性系统的校正与设计5.1 系统校正的基本概念5.2 常用校正器及其特性5.3 系统校正的方法5.4 系统校正实例分析第六章:非线性控制系统分析6.1 非线性系统的基本概念6.2 非线性系统的数学模型6.3 非线性系统的稳定性分析6.4 非线性系统的控制策略第七章:状态反馈与观测器设计7.1 状态反馈控制的基本原理7.2 状态反馈控制器的设计方法7.3 观测器的设计与分析7.4 状态反馈控制系统应用实例第八章:先进控制策略8.1 鲁棒控制8.2 自适应控制8.3 最优控制8.4 智能控制第九章:最优控制理论9.1 最优控制的基本概念9.2 线性二次调节器(LQR)9.3 离散时间最优控制9.4 最优控制的应用第十章:现代控制理论在工程应用10.1 现代控制理论在自动化领域的应用10.2 现代控制理论在控制中的应用10.3 现代控制理论在航空航天领域的应用10.4 现代控制理论在其他领域的应用第十一章:鲁棒控制理论11.1 鲁棒控制的基本概念11.2 鲁棒控制的设计方法11.3 鲁棒控制的应用实例11.4 鲁棒控制在实际系统中的性能评估第十二章:自适应控制理论12.1 自适应控制的基本概念12.2 自适应控制的设计方法12.3 自适应控制的应用实例12.4 自适应控制在复杂系统中的应用与挑战第十三章:数字控制系统设计13.1 数字控制系统的概述13.2 数字控制器的设计方法13.3 数字控制系统的仿真与实验13.4 数字控制系统在实际应用中的案例分析第十四章:控制系统中的计算机辅助设计14.1 计算机辅助设计的基本概念14.2 控制系统CAD工具与方法14.3 基于软件的控制系统设计与仿真14.4 控制系统CAD在现代工程中的应用案例第十五章:现代控制理论的前沿与发展15.1 现代控制理论的最新研究动态15.2 控制理论与其他领域的交叉融合15.3 未来控制理论的发展趋势15.4 控制理论在解决现实世界问题中的潜力与挑战重点和难点解析本《现代控制理论》教案大纲涵盖了现代控制理论的基本概念、方法与应用,分为十五个章节。
第一章线性离散系统第一节概述随着微电子技术,计算机技术和网络技术的发展,采样系统和数字控制系统得到广泛的应用。
通常把采样系统,数字控制系统统称为离散系统。
一、举例自动测温,控温系统图;加热气体图解:1. 当炉温h变化时,测温电阻R变化→R∆,电桥失去平衡状态,检流计指针发生偏转,其偏转角度为)e;(t2. 检流计是个高灵敏度的元件,为防磨损不允许有摩擦力。
当凸轮转动使指针),接触时间为τ秒;与电位器相接触(凸轮每转的时间为T3. 当炉温h 连续变化时,电位器的输出是一串宽度为τ的脉冲信号e *τ(t);4.e *τ(t)为常值。
加热气体控制阀门角度调速器电动机放大器h →→→→→→ϕ 二、相关定义说明(通过上例来说明) 1. 信号采样偏差)(t e 是连续信号,电位器的输出的e *τ(t)是脉冲信号。
连续信号转变为脉冲信号的过程,成为采样或采样过程。
实现采样的装置成为采样器。
To —采样周期,f s =--To1采样频率,W s =2πf s —采样角频率 2.信号复现因接触时间很小,τo T 〈〈τ,故可把采样器的输出信号)(t e *近似看成是一串强度等于矩形脉冲面积的理想脉冲,为了去除采样本身带来的高额分量,需要把离散信号)(t e *恢复到原信号)(t e 。
实现方法:是在采样器之后串联一个保持器,及信号复现滤波器。
作用:是把)(t e *脉冲信号变成阶梯信号e h (t)3.采样系统结构图r(t),e(t),c(t),y(t)为连续信号,)(t e *为离散信号)(s G h ,)(s G p ,)(s H 分别为保持器,被控对象和反馈环节的传递函数。
(t)r4.采样系统工作过程⇒由保持器5. 采样控制方式采样周期To ⎪⎩⎪⎨⎧=≠=⇒相位不同步采样常数常数6. 采样系统的研究方法(或称使用的数字工具)因运算过程中出现s 的超越函数,故不用拉式变换法,二采用z 变换方法,状态空间法。
《现代控制理论》课程教案第一章:绪论1.1 课程简介介绍《现代控制理论》的课程背景、意义和目的。
解释控制理论在工程、科学和工业领域中的应用。
1.2 控制系统的基本概念定义控制系统的基本术语,如系统、输入、输出、反馈等。
解释开环系统和闭环系统的区别。
1.3 控制理论的发展历程概述控制理论的发展历程,包括经典控制理论和现代控制理论。
介绍一些重要的控制理论家和他们的贡献。
第二章:数学基础2.1 线性代数基础复习向量、矩阵和行列式的基本运算。
介绍矩阵的特殊类型,如单位矩阵、对角矩阵和反对称矩阵。
2.2 微积分基础复习微积分的基本概念,如极限、导数和积分。
介绍微分方程和微分方程的解法。
2.3 复数基础介绍复数的基本概念,如复数代数表示、几何表示和复数运算。
解释复数的极坐标表示和欧拉公式。
第三章:控制系统的基本性质3.1 系统的稳定性定义系统的稳定性,并介绍判断稳定性的方法。
解释李雅普诺夫理论在判断系统稳定性中的应用。
3.2 系统的可控性定义系统的可控性,并介绍判断可控性的方法。
解释可达集和可观集的概念。
3.3 系统的可观性定义系统的可观性,并介绍判断可观性的方法。
解释观测器和状态估计的概念。
第四章:线性系统的控制设计4.1 状态反馈控制介绍状态反馈控制的基本概念和设计方法。
解释状态观测器和状态估计在控制中的应用。
4.2 输出反馈控制介绍输出反馈控制的基本概念和设计方法。
解释输出反馈控制对系统稳定性和性能的影响。
4.3 比例积分微分控制介绍比例积分微分控制的基本概念和设计方法。
解释PID控制在工业控制系统中的应用。
第五章:非线性控制理论简介5.1 非线性系统的特点解释非线性系统的定义和特点。
介绍非线性系统的常见类型和特点。
5.2 非线性控制理论的方法介绍非线性控制理论的基本方法,如反馈线性化和滑模控制。
解释非线性控制理论在实际应用中的挑战和限制。
5.3 案例研究:倒立摆控制介绍倒立摆控制系统的特点和挑战。
解释如何应用非线性控制理论设计倒立摆控制策略。