空间机构的自由度计算资料讲解
- 格式:doc
- 大小:67.50 KB
- 文档页数:3


机构自由度的概念
机构自由度(Degree of Freedom, DoF)是机械原理中的一个核心概念,它描述了一个机构在没有外力或驱动力作用下能够独立完成的运动的数量。
具体来说:
机构自由度定义:
在一个机械机构中,为了确定该机构所有构件的相对位置和姿态,所需要的独立运动参数的数量称为机构的自由度。
- 对于单个构件而言,在三维空间中,它有6个自由度,包括沿三个正交方向(X、Y、Z轴)的平动自由度以及绕这三个轴的转动自由度。
- 当多个构件通过运动副(如铰链、滑块等)相互连接组成机构时,由于运动副对构件的约束作用,实际的机构自由度会小于各个独立构件自由度之和。
- 机构的总自由度计算公式为:总自由度= 各构件自由度之和- 约束数(即由运动副引入的约束数目)。
- 在实际应用中,如果机构具有一个或多个原动件(例如电机、气缸等驱动部件),并且原动件提供的独立输入变量与机构自由度相
匹配,则机构可以实现确定的、预设的运动。
平面机构自由度通常指机构在二维平面内的自由度,一般包括沿两个正交方向的移动自由度及一个绕垂直于平面轴的转动自由度。
总结来说,机构自由度是评价机构运动特性的重要指标,对于设计和分析机械设备有着至关重要的意义。
只有当机构的自由度等于零时,机构才是完全刚性固定的结构;而具有至少一个自由度的机构才能够产生相对运动,并可能成为有用的机械装置。
第5章空间机构自由度分析的约束螺旋求解法对机构最基本的认识是要知道它的自由度,机构的自由度计算原本是一个简单的问题,用传统的Kutzbach-Grübler公式[1-3]就可以获得正确的结果,而且仅仅基于算术运算。
这个最基本的问题几乎在所有的教科书上都有论述。
这里为什么还要论及呢?在机构学的发展历程中,发现了不少的机构不符合上述公式[4-5]。
这种情况长期来倒还能容忍,到底当时该公式对于绝大多数机构还是适用的,特别是适用于众多的平面机构。
但是在近十年来当空间机构研究迅速发展时,问题变得突出起来,传统的大家熟悉的这个公式常常算不出正确的结果,特别是在新世纪开始前后的这十年间,国际机构学界开展了少自由度并联机器人新机构的研究,这个不为人们重视的自由度计算却经常让人们迷惑,用公式常常不能够得到正确的结果。
甚至到了新世纪的2002年,美国马里兰大学的Tsai教授在分析他发明一种3自由度并联机构时再次指出,如果用Kutzbach-Grübler公式计算该机构的自由度数将会得到错误的结果[6]。
这样,人们不得不采取其它麻烦的分析方法[7-11],多花费了很多的时间。
究其原因,认识到这是由于在机构中存在过约束(overconstrained)的缘故,约束被重复计算了。
许多人不断寻找新的普遍适用的机构的自由度计算公式,仅举文献[12-13]。
人们提出过许多新概念,包括公共约束、虚约束等等。
文献[14,15]还建议自由度公式中应采用机构螺旋系的“阶”。
在这方面国内也有许多学者进行了有意义的研究,文献[16]以闭合约束数定义公共约束以确定阶,文献[17]以非线性代数方程组的相关性来判定机构的“秩”,然而他却是一个十分困难的求解问题。
考虑“过约束”去对Kutzbach-Grübler公式加以修正,关键是如何分析过约束,到这个新世纪开始,这个问题在国际上一直未能解决。
还有一些学者甚至还采取如李代数和群论[18-20]等现代数学来探讨,也取得了一些进展。
2.5.2空间机构的自由度计算同平面机构自由度计算公式推导过程一样,空间机构的自由度 = 所有活动构件自由度 - 所有运动副引入的约束数,其公式为:F=6n-5P5-4P4-3P3-2P2-P1式中:n为活动构件数; P1、P2、P3、P4、P5分别为1~5级运动副的个数。
(a) (b)图2.5.2-1图(a)所示为自动驾驶仪操纵装置内的空间四杆机构。
活塞2相对气缸运动后通过连杆3使摇杆4作定轴转动。
构件1、2组成圆柱副,构件2、3和构件4、1分别组成转动副,构件3、4组成球面副,其运动示意图如图(b)所示。
试计算该机构的自由度。
解: n=3, P5=2, P4=1, P3=1F=6n-5P5-4P4-3P3-2P2-P=6×3-5×2-4×1-3×1=1.图(a)所示为某飞机起落架的收放机构。
构件1为原动件,构件1、2和2、3分别组成3级球副,构件1、4和3、4分别组成5级移动副和转动副,其运动示意图如图(b)所示。
试计算该机构的自由度并判断其运动是否确定。
解: n=3, P5=2, P3=2F=6n-5P5-4P4-3P3-2P2-P=6×3-5×2-3×2=1.计算结果表明需要2个原动件机构的运动才能得以确定。
而实际上该机构在1个原动件的带动下运动就能确定了。
上述问题出现在何处?(a) (b)图2.5.2-2构件2的两端同构件1、3分别组成球副,这样使得构件2可以绕自身轴线转动,而这个转动(自由度)对整个机构的运动没有影响,对比平面凸轮机构中滚子的转动一样,称为局部自由度。
图2.5.2-3 对于局部自由度也有两种处理方法:①. 修正自由度计算公式:F=6n-5P5-4P4-3P3-2P2-P1-k 式中:k为局部自由度数。
这样例题2的机构的自由度应为:F=6n-5P5-4P4-3P3-2P2-P1-k=6×3-5×2-3×2-1=1具有确定的运动。
2.5.2空间机构的自由度计算同平面机构自由度计算公式推导过程一样,空间机构的自由度 = 所有活动构件自由度 - 所有运动副引入的约束数,其公式为:F=6n-5P5-4P4-3P3-2P2-P1式中:n为活动构件数; P1、P2、P3、P4、P5分别为1~5级运动副的个数。
(a) (b)图2.5.2-1图(a)所示为自动驾驶仪操纵装置内的空间四杆机构。
活塞2相对气缸运动后通过连杆3使摇杆4作定轴转动。
构件1、2组成圆柱副,构件2、3和构件4、1分别组成转动副,构件3、4组成球面副,其运动示意图如图(b)所示。
试计算该机构的自由度。
解: n=3, P5=2, P4=1, P3=1F=6n-5P5-4P4-3P3-2P2-P=6×3-5×2-4×1-3×1=1.图(a)所示为某飞机起落架的收放机构。
构件1为原动件,构件1、2和2、3分别组成3级球副,构件1、4和3、4分别组成5级移动副和转动副,其运动示意图如图(b)所示。
试计算该机构的自由度并判断其运动是否确定。
解: n=3, P5=2, P3=2F=6n-5P5-4P4-3P3-2P2-P=6×3-5×2-3×2=1.计算结果表明需要2个原动件机构的运动才能得以确定。
而实际上该机构在1个原动件的带动下运动就能确定了。
上述问题出现在何处?(a) (b)图2.5.2-2构件2的两端同构件1、3分别组成球副,这样使得构件2可以绕自身轴线转动,而这个转动(自由度)对整个机构的运动没有影响,对比平面凸轮机构中滚子的转动一样,称为局部自由度。
图2.5.2-3 对于局部自由度也有两种处理方法:①. 修正自由度计算公式:F=6n-5P5-4P4-3P3-2P2-P1-k 式中:k为局部自由度数。
这样例题2的机构的自由度应为:F=6n-5P5-4P4-3P3-2P2-P1-k=6×3-5×2-3×2-1=1具有确定的运动。
自由度计算公式
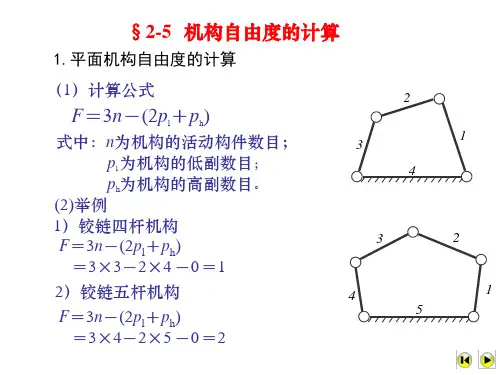
自由度计算公式:1、自由度:机构的具有确定运动所必需要的独立运动参数为机构自由度。
2、自由度计算公式:F=3n-2pl-2phn:活动构件数pl:低副数ph:高副数3、机构具有运动的条件:自由度=原动件数。
机构运动离不开自由度,自由度,分为平面机构自由度和空间机构自由度!
自由度:统计学术语:自由度(degree of freedom, df)指的是计算某一统计量时,取值不受限制的变量个数。
通常df=n-k。
其中n为样本数量,k为被限制的条件数或变量个数,或计算某一统计量时用到其它独立统计量的个数。
自由度通常用于抽样分布中。
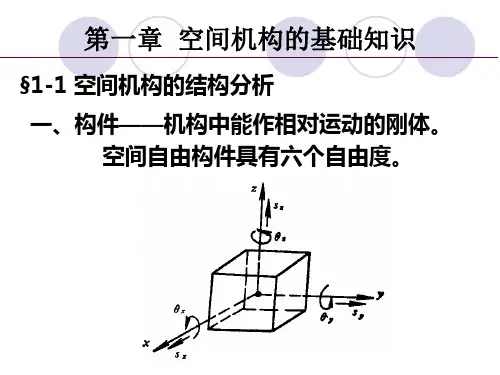
物理学术语:自由度是指物理学当中描述一个物理状态,独立对物理状态结果产生影响的变量的数量。
如运动自由度是确定一个系统在空间中的位置所需要的最小坐标数。
例如火车车厢沿铁轨的运动,只需从某一起点站沿铁轨量出路程,就可完全确定车厢所在的位置,即其位置用一个量就可确定,我们说火车车厢的运动有一个自由度;汽车能在地面上到处运动,自由程度比火车大些,需要用两个量(例如直角坐标x,y)才能确定其位置,我们说汽车的运动有两个自由度;飞机能在空中完全自由地运动,需要用三个量(例如直角坐标x,y,z)才能确定其位置,我们说飞机在空中的运动有三个自由度。
所谓自由度数就是确定物体在空间的位置所需独立坐标的数目。
2.5.2空间机构的自由度计算
同平面机构自由度计算公式推导过程一样,空间机构的自由度 = 所有活动构件自由度 - 所有运动副引入的约束数,其公式为:
F=6n-5P
5-4P
4
-3P
3
-2P
2
-P
1
式中:n为活动构件数; P
1、P
2
、P
3
、P
4
、P
5
分别为1
~
5级运动副的个数。
(a) (b)
图2.5.2-1
图(a)所示为自动驾驶仪操纵装置内的空间四杆机构。
活塞2相对气缸运动后通过连杆3使摇杆4作定轴转动。
构件1、2组成圆柱副,构件2、3和构件4、1分别组成转动副,构件3、4组成球面副,其运动示意图如图(b)所示。
试计算该机构的自由度。
解: n=3, P
5
=2, P
4
=1, P
3
=1
F=6n-5P
5
-4P
4
-3P
3
-2P
2
-P
=6×3-5×2-4×1-3×1=1.
图(a)所示为某飞机起落架的收
放机构。
构件1为原动件,构件1、2和2、3分别组成3级球副,构件1、4和3、4分别组成5级移动副和转动副,其运动示意图如图(b)所示。
试计算该机构的自由度并判断其运动是否确定。
解: n=3, P
5=2, P
3
=2
F=6n-5P
5-4P
4
-3P
3
-2P
2
-P
=6×3-5×2-3×2=1.
计算结果表明需要2个原动件机
构的运动才能得以确定。
而实际上该机构
在1个原动件的带动下运动就能确定了。
上述问题出现在何处?
(a) (b)
图2.5.2-2
构件2的两端同构件1、3分别组成球副,这样使得构件2可以绕自身轴线转动,而这个转动(自由度)对整个机构的运动没有影响,对比平面凸轮机构中滚子的转动一样,称为局部自由度。
图2.5.2-3 对于局部自由度也有两种处理方法:
①. 修正自由度计算公式:F=6n-5P
5
-4P
4
-3P
3
-2P
2
-P
1
-k 式中:k为局部自由度数。
这样例题2的机构的自由度应为:
F=6n-5P
5
-4P
4
-3P
3
-2P
2
-P
1
-k=6×3-5×2-3×2-1=1
具有确定的运动。
②. 机构设计时改变运动副类型在例题2中,可以将构件2一端的球副设计变成球销副,如图2.5.2-3所示,这样就消除了构件2绕自身轴线转动的局部自由度。
这时机构的自由度应为:
F=6n-5P
5
-4P
4
-3P
3
-2P
2
-P
1
=6×3-5×2-4×1-3×1=1
具有确定的运动。
由此可以看出,空间机构中同样可能存在有局部自由度、虚约束等问题,在计算机构自由度时应加以注意判断,进行正确的处理。