自由度的详解和计算
- 格式:ppt
- 大小:1.54 MB
- 文档页数:37
平面自由度计算公式
平面自由度指的是一个物体在平面内可以任意运动的自由程度,
通常用两个自由度来描述。
具体计算公式如下:
平面自由度=总自由度-移动自由度
其中,总自由度指的是一个物体在三维空间中的自由度,通常是3个自由度。
移动自由度指的是一个物体在平面内可以沿着平面内某一
方向运动的自由度,通常是1个自由度(因为平面内只能沿一个方向
移动,不能同时在两个方向上移动)。
因此,平面自由度= 3 - 1 = 2。
值得注意的是,以上公式是基于物体可以在平面内任意运动的前
提下计算得出的。
如果物体受到某些限制,例如地面摩擦力等,平面
自由度可能会受到影响。
此外,在一些特殊情况下,物体的平面自由度也可能会超过2个。
例如,如果物体受到一个平面内的力矩,那么它在平面内的自由度就
可能会增加到3个。
在实际计算中,我们需要根据具体情况来确定平面自由度的值。
机械原理自由度计算
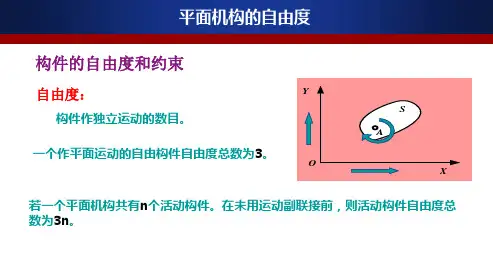
在机械原理中,自由度是指一个物体独立运动的数目。
对于一个杆件(刚体),在平面上可以由其上任一点A的坐标x和y,以及通过A点的垂线AB与横坐标轴的夹角等3个参数来决定,因此杆件具有3个自由度。
对于做空间运动的构件,有6个自由度;对于做平面运动的构件,有3个自由度。
假设活动构件数为n,高副数为Ph,低副数为Pl,则运动链的自由度为$F=3n-2Pl-Ph$。
其中,点线接触为低副,面接触为高副。
在计算运动副时,需要注意以下情况:
- 复合铰链:两个以上的构件在同一处以转动副相联。
计算自由度时,如有K个构件在同一处形成复合铰链,则其转动副的数目为$(k-1)$个。
- 局部自由度:构件局部运动所产生的自由度,它仅仅局限于该构件本身,而不影响其他构件的运动。
在计算自由度时,从机构自由度计算公式中将局部自由度减去。
- 虚约束:对机构的运动实际不起作用的约束。
计算自由度时应去掉虚约束。
虚约束都是在一定的几何条件下出现的,常见的情况有:两构件联接前后,联接点的轨迹重合;两构件构成多个移动副,且导路平行;两构件构成多个转动副,且同轴;运动时,两构件上的两点距离始终不变;对运动不起作用的对称部分;两构件构成高副,两处接触,且法线重合。
在计算自由度时,需要考虑机构的具体结构和运动情况,以便确定各个运动副的约束情况,从而正确计算自由度的数值。

自由度的计算方法一、自由度的基本概念。
1.1 自由度是什么呢?简单来说,它就像是一个系统或者对象能够自由活动或者变化的“空间”大小。
打个比方,就像一个人在一个大房间里,他可以到处走动,这个走动的范围就有点像自由度。
在科学和数学的世界里,自由度有着非常精确的定义,但咱先从这种比较形象的方式去理解它。
1.2 自由度可不是一个抽象到摸不着头脑的东西。
比如说,一个单摆,它只能在一个平面内来回摆动,它的自由度相对就比较小。
这就好比一个人被限制在一条小道上活动,能做的动作很有限。
二、自由度在不同领域的计算方法。
2.1 在统计学里。
统计学中的自由度计算就像是一场有趣的解谜游戏。
比如说,我们有一组数据,要计算样本方差。
这里面自由度的计算就和样本数量有关。
如果我们有n个样本,那么计算样本方差时的自由度就是n 1。
这就好像是我们本来有n个可以自由变动的数,但因为要满足一些条件,就像被抽走了一点“自由”,少了1个自由度。
这就如同一个团队有n个人,但是有一个人要负责协调整体,不能完全自由行动,所以真正能自由发挥的就少了一个。
2.2 在物理学中。
物理学里自由度的计算更加直观。
像一个刚体在空间中的运动,它有平动和转动。
一个刚体在三维空间中的平动有3个自由度,这就像一个小方块可以在前后、左右、上下三个方向移动,这是它的平动自由度。
然后呢,刚体绕着三个坐标轴的转动又有3个自由度,总共就是6个自由度。
这就好比一个会翻跟头、能到处跑的杂技演员,他有多种动作方向的可能性,这些不同方向的动作就构成了他的自由度。
2.3 在机械工程领域。
机械工程里自由度也很重要。
例如一个简单的平面机构,由一些杆件和关节组成。
我们要计算这个机构的自由度,就要考虑杆件的数量、关节的类型等因素。
这里面有一个公式,F = 3n 2PL PH(这里F是自由度,n是杆件数,PL是低副的数量,PH 是高副的数量)。
这就像一个复杂的机械拼图,每个杆件和关节就像拼图的小碎片,我们要根据它们的数量和类型来算出这个机械结构整体能有多少“活动空间”,也就是自由度。
机械原理自由度的计算机械原理是研究物体在空间中的运动和静止状态的学科,而自由度则是描述一个物体在空间中能够自由运动的能力。
在机械系统中,了解物体的自由度对于设计和分析至关重要。
本文将介绍机械原理自由度的计算方法,帮助读者更好地理解机械系统的运动特性。
首先,我们需要了解自由度的概念。
在机械系统中,一个物体的自由度可以通过其能够在空间中独立运动的轴线数量来描述。
例如,一个刚性物体在三维空间中有6个自由度,分别是三个平移自由度和三个转动自由度。
而在二维平面中,一个刚性物体有3个自由度,分别是两个平移自由度和一个转动自由度。
通过计算物体的自由度,我们可以更好地了解其在空间中的运动特性。
接下来,我们将介绍如何计算机械系统的自由度。
对于一个多连杆机构,我们可以通过以下步骤来计算其自由度:1. 确定机构的运动副数量,首先需要确定机构中所有的运动副数量,包括旋转副和滑动副。
运动副的数量将直接影响机构的自由度。
2. 计算约束数量,接下来需要计算机构中的约束数量,包括固定约束和移动约束。
固定约束会限制物体的运动,而移动约束则会增加机构的自由度。
3. 计算自由度:最后,通过运动副数量和约束数量的对比,我们可以计算出机构的自由度。
自由度的计算公式为:自由度 = 3 (运动副数量) 约束数量。
通过以上步骤,我们可以准确地计算出机械系统的自由度,从而更好地理解其运动特性和设计特点。
在实际工程中,了解机械系统的自由度对于设计和分析都具有重要意义。
通过准确计算自由度,我们可以避免设计中的错误,确保机构的运动性能符合要求。
同时,对于复杂的机械系统,计算自由度也可以帮助工程师更好地理解其结构和运动规律,为系统的优化提供重要参考。
总之,机械原理自由度的计算是机械工程中的重要内容,通过准确计算自由度,我们可以更好地理解机械系统的运动特性,为设计和分析提供重要依据。
希望本文的介绍能够帮助读者更好地理解这一概念,为工程实践提供帮助。
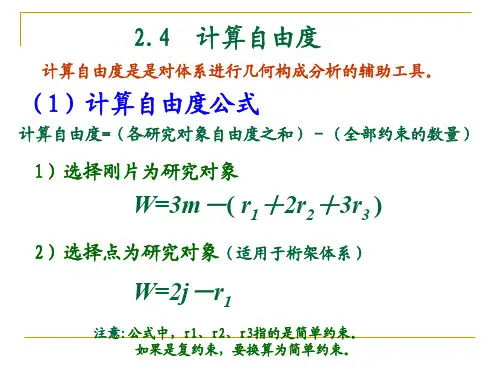
自由度公式
自由度计算公式:1、自由度:机构的具有确定运动所必需要的独立运动参数为机构自由度。
2、自由度计算公式:f=3n-2pl-2phn:活动构件数pl:低副数ph:高副数3、机构具有运动的条件:自由度=原动件数。
机构运动离不开自由度,自由度,分为平面机构自由度和空间机构自由度!
自由度:统计学术语:自由度(degree of freedom, df)指的是计算某一统计量时,取值不受限制的变量个数。
通常df=n-k。
其中n为样本数量,k为被限制的条件数或变量个数,或计算某一统计量时用到其它独立统计量的个数。
自由度通常用于抽样分布中。
物理学术语:自由度是指物理学当中描述一个物理状态,独立对物理状态结果产生影响的变量的数量。
如运动自由度是确定一个系统在空间中的位置所需要的最小坐标数。
例如火车车厢沿铁轨的运动,只需从某一起点站沿铁轨量出路程,就可完全确定车厢所在的位置,即其位置用一个量就可确定,我们说火车车厢的运动有一个自由度;汽车能在地面上到处运动,自由程度比火车大些,需要用两个量(例如直角坐标x,y)才能确定其位置,我们说汽车的运动有两个自由度;飞机能在空中完全自由地运动,需要用三个量(例如直角坐标x,y,z)才能确定其位置,我们说飞机在空中的运动有三个自由度。
所谓自由度数就是确定物体在空间的位置所需独立坐标的数目。
如何计算自由度?你需要知道的公式和应用
场景
自由度在物理学、化学、统计学等领域中都是很常见的一个概念。
那么,什么是自由度呢?自由度是指一个系统中可以自由变化的独立
参数个数,或能自由变化的状态变量个数。
接下来,我们来了解一下
自由度的计算公式和应用场景。
一、自由度的计算公式
在物理学中,自由度的计算公式是 N = 3n - m,其中 N 表示自
由度的数量,n 表示可运动的体系粒子数,m 表示约束条件的数量。
在化学中,自由度的计算公式是 F = N - P,其中 F 表示自由度
的数量,N 表示系统的总自由度,P 表示组成物质的分子之间不可自
由变化的原子数。
在统计学中,自由度的计算公式是 df = n - 1,其中 df 表示自
由度的数量,n 表示研究对象的样本量。
二、自由度的应用场景
物理学中,自由度的应用非常广泛。
比如,当我们研究分子的振
动模式时,需要计算其自由度;当我们研究气体的态方程时,需要计
算其自由度;当我们研究刚体的运动时,也需要计算其自由度。
化学中,自由度的应用主要体现在研究反应过程中。
比如,当我
们研究化学反应的平衡时,可以利用自由度的概念计算反应均衡点的
温度和压力。
统计学中,自由度的应用主要体现在方差分析中。
比如,在单因
素方差分析中,自由度等于 n - 1,表示样本量减去一个参数的数量。
总之,在各个领域中,自由度都是非常重要的概念,掌握自由度
的计算公式和应用场景,可以帮助我们更好地理解和应用该概念。
自由度的公式自由度自由度是一种用来描述系统中自由运动的程度的概念。
在物理学、力学、统计学和工程学中都有不同的定义和应用。
下面是一些与自由度相关的公式和解释。
1. 物理学中的自由度在物理学中,自由度指的是一个物体在空间中可以独立运动的个数。
对于刚体,自由度的计算可以使用公式:F=6−C其中,F表示自由度,C表示约束条件的个数。
例如,对于一个在三维空间中的刚体,在没有约束的情况下,它有6个自由度,分别是三个平动自由度和三个转动自由度。
2. 统计学中的自由度在统计学中,自由度指的是样本数据中可以自由变动的独立信息的个数。
在t分布和卡方分布中,自由度是一个重要的参数。
•t分布的自由度公式为:df=n−1,其中n是样本数据的个数。
自由度越大,t分布趋近于标准正态分布。
•卡方分布的自由度公式为:df=n−1,其中n是卡方变量的个数。
自由度越大,卡方分布的形状越接近正态分布。
例如,假设我们有一组包含10个样本的数据集。
对于该数据集,t分布和卡方分布的自由度都是9。
3. 工程学中的自由度在工程学中,自由度指的是系统中可以独立变动的参数的个数。
在机械系统中,可以使用自由度来描述系统的运动和变形。
例如,对于一个机械手臂,它的自由度取决于它的关节数量。
一个简单的机械臂,如只有一个旋转关节和一个伸缩关节,它的自由度就是2。
而一个复杂的机械臂,如包含多个旋转关节和伸缩关节,就会有更多的自由度。
总结•物理学中的自由度描述物体在空间中的独立运动个数。
•统计学中的自由度描述样本数据中独立变动的信息个数。
•工程学中的自由度描述系统中可以独立变动的参数个数。
以上是关于自由度的相关公式及解释的总结。
自由度是一个重要的概念,在不同领域有不同的定义和应用。
4. 自由度与稀疏矩阵在线性代数中,自由度和稀疏矩阵之间存在一定的关联。
稀疏矩阵是指矩阵中大部分元素为零的矩阵。
对于一个具有m行n列的稀疏矩阵,其非零元素的个数为k。
自由度和稀疏矩阵之间的关系可以使用以下公式描述:DF=m×n−k其中,DF表示自由度,m×n表示矩阵的总元素个数。
机械自由度计算例题详解1. 引言大家好,今天我们来聊聊一个有趣又实用的话题:机械自由度的计算。
听起来有点儿复杂?别担心,我们会轻松搞定它。
机械自由度,简单来说,就是一个机械系统在空间中可以独立运动的方式。
想象一下,一个玩具车在地上行驶,车轮能转动,车身能前后移动,这些就是自由度。
我们要算的是,它到底有多少种动的方式。
好了,话不多说,咱们就直接进入正题,看看怎么计算吧!2. 自由度的基本概念2.1 什么是自由度?在机械领域,自由度就是指机械系统能够独立运动的方向和方式。
比如,咱们的手臂可以上抬、下放、左右摆动,这些都是自由度。
通常来说,自由度越多,机械系统的灵活性就越强。
不过,太多的自由度也可能导致系统的不稳定,就像玩过山车,太刺激了可就不好了。
2.2 自由度的计算方法咱们来看看怎么计算这些自由度。
最常用的公式是格鲁伯公式:自由度(F) = 3N J H。
这里的N代表零件数量,J是关节数量,H是约束条件的数量。
听起来有点儿复杂,但别急,我们可以举个例子来说明。
3. 例子解析3.1 例子背景想象一下,我们有一个简单的机械手,它有三个关节,分别是肩关节、肘关节和腕关节。
这个机械手有两个零件:上臂和前臂。
我们想知道它的自由度有多少,以便设计得更灵活。
好,让我们一起动手算一算!3.2 进行计算首先,我们来算零件数量N。
在这个例子中,N = 2,因为我们有上臂和前臂。
接着,咱们再来看看关节数量J,这里有三个关节,所以J = 3。
最后,约束条件H,对于这个机械手来说,我们假设没有额外的约束,所以H = 0。
现在,按照格鲁伯公式,咱们代入数字:F = 3N J H = 3×2 3 0。
算一算,F = 63 = 3。
哇,结果是3!这就意味着这个机械手可以在三种独立的方向上自由运动。
4. 总结今天,我们通过一个简单的例子,搞清楚了机械自由度的计算方法。
是不是觉得其实很简单呢?就像做一道数学题,只要找对了公式,计算起来就会顺利很多。