空间连杆机构自由度的计算
- 格式:ppt
- 大小:459.00 KB
- 文档页数:11
机构自由度计算方法机构自由度的计算例子机械原理机构自由度的计算是机构的结构分析的重要内容。
任何一个机构设计好以后,需要做的第一件事情就是计算机构的自由度。
机构自由度的计算公式是:F=3n-2p l-p h。
公式本身简单,只需要数出活动构件的数目n,低副的数目p l,高副的数目p h,则自由度就很容易计算了。
使用该公式有一个前提,就是要先判断出一些特殊情况:复合铰链,局部自由度和虚约束,在把这些情况都弄清楚后,再用上述公式计算,才可以得到正确的结果。
下面举一个例子,说明机构自由度的计算方法。
计算图示机构的自由度,并判断该机构是否具有确定运动。
如有复合铰链、局部自由度、虚约束,请直接在题图中标出。
拿到该机构以后,第一步就是找到凸轮M,发现推杆DB尖端有一个滚子,此滚子就是局部自由度。
局部自由度几乎永远出现在滚子推杆的凸轮机构中。
对于该局部自由度,处理方法是把该滚子B与BD杆焊接在一起,成为一个整体。
接着考察虚约束。
虚约束中最常见的就是某一个构件和机架之间有导路重合或者平行的移动副。
这里FH构件就在F,G,H三个地方有三个移动副与机架相联,而这三个移动副导路重合。
此时只有一个起作用,其它的就是虚约束。
对于虚约束,只保留其中一个,其它的全部拿掉。
最后考虑复合铰链。
复合铰链出现在转动副的地方,如果在转动副处有2个以上的构件相联,则该铰链就是复合铰链。
从上图可以看出,J点有三个构件IJ,KJ,JL相连,所以J 是复合铰链。
对于复合铰链,在计算转动副的数目时,在此处留心即可,注意这里的转动副数目等于相连的构件数目减1.综上所述,把局部自由度,虚约束,复合铰链表示出来的结果见下图这样,把滚子B和BD焊接在一起,从而去掉局部自由度;而去掉G,H这两个虚约束;J点有两个转动副。
下面进入公式的计算。
活动构件:齿轮A,齿轮M,连杆IJ,连杆KJ,连杆JL,滑块L,连杆BD(焊接了滚子B),连杆DE,连杆FH。
共计9个。
平面机构的自由度与运动分析一、平面机构的自由度平面机构是指机构中的构件只能在一个平面内运动的机构,它由多个连接杆、转动副和滑动副组成。
平面机构的自由度是指机构中能够独立变换位置的最小的连接杆数目,也可以理解为机构中独立的变量的数量。
对于平面机构,其自由度可以通过以下公式计算:自由度=3n-2j-h其中,n表示连接杆的数量,j表示驱动链的数量,h表示外部约束的数量。
根据上述公式可以看出,自由度与平面机构中连接杆的数量和驱动链和外部约束的数量有关。
连接杆的数量越多,机构的自由度就越大,可以实现更复杂的运动。
驱动链的数量越多,机构中的动力驱动器越多,自由度就越小,机构的运动变得更加确定。
外部约束的数量越多,机构中的约束条件就越多,自由度就越小,机构的运动也会变得更加确定。
二、平面机构的运动分析1.闭合链和链架分析:首先需要确定机构中的闭合链和链架,闭合链是指机构中连接杆形成一个封闭的回路,闭合链中的连接杆数目应该为n 或n-1,n是机构中的连接杆数量。
链架是指机构中的连接杆形成一个开放的链路。
通过分析闭合链和链架中的链接关系和约束条件,可以确定机构中构件的位置和运动方式。
2.位置和速度分析:根据机构的连接杆的长度和角度,可以通过几何方法或代数方法确定机构中构件的位置和速度分量。
通过分析连接杆的长度和角度的变化规律,可以推导出机构中构件的位置和速度随时间的变化关系。
3.加速度和动力学分析:根据机构中各个构件的位置和速度,可以通过几何方法或动力学方法计算构件的加速度和动力学特性。
通过分析机构中构件的加速度和动力学特性,可以确定机构中构件的运动稳定性和质量分布。
4.动力分析:对于需要携带负载或进行力学传动的机构,需要进行动力学分析,确定机构中各个构件的受力和承载能力。
通过分析机构中构件的受力情况,可以确定机构的设计参数和强度要求。
总结起来,平面机构的自由度与运动分析是确定机构中构件位置和运动状态的重要方法,通过分析机构中的闭合链和链架、构件的位置和速度、加速度和动力学特性,可以确定机构的运动方式和特性,为机构的设计和优化提供依据。

凸轮连杆机构自由度计算1. 引言说到机械结构,大家一定听说过“凸轮连杆机构”吧!别看名字挺复杂,其实它就是一种让机器动起来的神奇组合。
就像我们身边的各种设备,无论是汽车的发动机,还是玩具里的小马达,背后都少不了这些精妙的设计。
不过,今天我们要聊的重点是自由度的计算,这个听上去有点儿高大上的概念,其实也没那么复杂,咱们一起来捋一捋。
2. 自由度的概念2.1 什么是自由度?自由度,顾名思义,就是一个机构可以独立运动的方式。
想象一下,咱们的手臂,它可以上下、左右、前后动,这些不同的运动方式就是自由度。
如果一个机构能在空间中随心所欲地动,那它的自由度就高;反之,受限制的运动就说明自由度低。
2.2 为什么要计算自由度?计算自由度,简单来说,就是为了知道这个机构能不能实现我们想要的动作。
就像买菜的时候,知道什么菜好吃,什么菜不适合,能省不少事儿。
想象一下,如果你设计的机器连转个圈都费劲,那可真是自讨苦吃。
因此,算清楚自由度,能帮助我们优化设计,避免不必要的麻烦。
3. 自由度计算的基本原则3.1 凯普拉定理要计算自由度,咱们得先了解个名叫“凯普拉定理”的东西。
这可是工程师们的金科玉律!根据这个定理,自由度的计算公式是这样的:F = 3(N 1) 2J H。
其中,F代表自由度,N是机构的零件数量,J是关节的数量,H是约束数量。
3.2 各种因素影响自由度这个公式就像做菜时的配方,不同的食材组合会影响最终的味道。
零件多了,能动的方式就多;关节多了,反而可能让动作变得笨拙;而约束条件就像一个个小绳子,把自由度给拴住了。
比如说,你如果在家里装了个重重的门,开关门的自由度自然就少了,动起来麻烦多了。
4. 实际应用4.1 机械手臂说到实际应用,我们可以看看机械手臂。
现代工业中,这玩意儿可是个大热门!机械手臂的设计需要精准的自由度计算,才能保证它可以灵活地抓取各种物品。
想象一下,咱们的手臂能做的事儿,机械手臂也得做到,比如说转动、抓握、移动等等。

机械原理自由度的计算机械原理是研究物体在空间中的运动和静止状态的学科,而自由度则是描述一个物体在空间中能够自由运动的能力。
在机械系统中,了解物体的自由度对于设计和分析至关重要。
本文将介绍机械原理自由度的计算方法,帮助读者更好地理解机械系统的运动特性。
首先,我们需要了解自由度的概念。
在机械系统中,一个物体的自由度可以通过其能够在空间中独立运动的轴线数量来描述。
例如,一个刚性物体在三维空间中有6个自由度,分别是三个平移自由度和三个转动自由度。
而在二维平面中,一个刚性物体有3个自由度,分别是两个平移自由度和一个转动自由度。
通过计算物体的自由度,我们可以更好地了解其在空间中的运动特性。
接下来,我们将介绍如何计算机械系统的自由度。
对于一个多连杆机构,我们可以通过以下步骤来计算其自由度:1. 确定机构的运动副数量,首先需要确定机构中所有的运动副数量,包括旋转副和滑动副。
运动副的数量将直接影响机构的自由度。
2. 计算约束数量,接下来需要计算机构中的约束数量,包括固定约束和移动约束。
固定约束会限制物体的运动,而移动约束则会增加机构的自由度。
3. 计算自由度:最后,通过运动副数量和约束数量的对比,我们可以计算出机构的自由度。
自由度的计算公式为:自由度 = 3 (运动副数量) 约束数量。
通过以上步骤,我们可以准确地计算出机械系统的自由度,从而更好地理解其运动特性和设计特点。
在实际工程中,了解机械系统的自由度对于设计和分析都具有重要意义。
通过准确计算自由度,我们可以避免设计中的错误,确保机构的运动性能符合要求。
同时,对于复杂的机械系统,计算自由度也可以帮助工程师更好地理解其结构和运动规律,为系统的优化提供重要参考。
总之,机械原理自由度的计算是机械工程中的重要内容,通过准确计算自由度,我们可以更好地理解机械系统的运动特性,为设计和分析提供重要依据。
希望本文的介绍能够帮助读者更好地理解这一概念,为工程实践提供帮助。
机构自由度的概念
机构自由度(Degree of Freedom, DoF)是机械原理中的一个核心概念,它描述了一个机构在没有外力或驱动力作用下能够独立完成的运动的数量。
具体来说:
机构自由度定义:
在一个机械机构中,为了确定该机构所有构件的相对位置和姿态,所需要的独立运动参数的数量称为机构的自由度。
- 对于单个构件而言,在三维空间中,它有6个自由度,包括沿三个正交方向(X、Y、Z轴)的平动自由度以及绕这三个轴的转动自由度。
- 当多个构件通过运动副(如铰链、滑块等)相互连接组成机构时,由于运动副对构件的约束作用,实际的机构自由度会小于各个独立构件自由度之和。
- 机构的总自由度计算公式为:总自由度= 各构件自由度之和- 约束数(即由运动副引入的约束数目)。
- 在实际应用中,如果机构具有一个或多个原动件(例如电机、气缸等驱动部件),并且原动件提供的独立输入变量与机构自由度相
匹配,则机构可以实现确定的、预设的运动。
平面机构自由度通常指机构在二维平面内的自由度,一般包括沿两个正交方向的移动自由度及一个绕垂直于平面轴的转动自由度。
总结来说,机构自由度是评价机构运动特性的重要指标,对于设计和分析机械设备有着至关重要的意义。
只有当机构的自由度等于零时,机构才是完全刚性固定的结构;而具有至少一个自由度的机构才能够产生相对运动,并可能成为有用的机械装置。
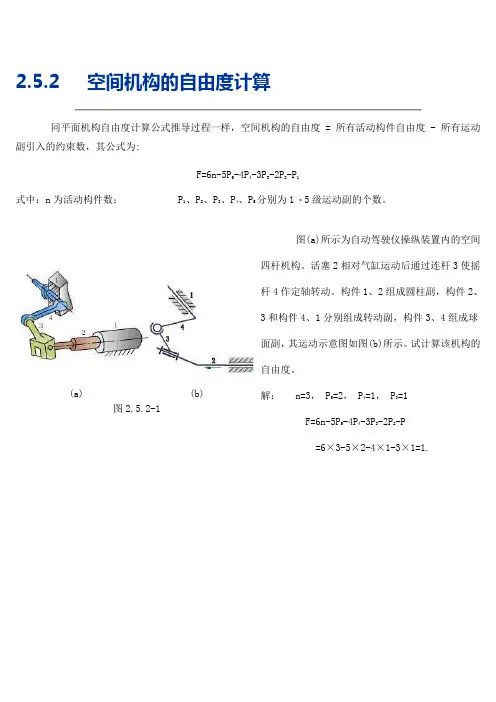
2.5.2空间机构的自由度计算同平面机构自由度计算公式推导过程一样,空间机构的自由度 = 所有活动构件自由度 - 所有运动副引入的约束数,其公式为:F=6n-5P5-4P4-3P3-2P2-P1式中:n为活动构件数; P1、P2、P3、P4、P5分别为1~5级运动副的个数。
(a) (b)图2.5.2-1图(a)所示为自动驾驶仪操纵装置内的空间四杆机构。
活塞2相对气缸运动后通过连杆3使摇杆4作定轴转动。
构件1、2组成圆柱副,构件2、3和构件4、1分别组成转动副,构件3、4组成球面副,其运动示意图如图(b)所示。
试计算该机构的自由度。
解: n=3, P5=2, P4=1, P3=1F=6n-5P5-4P4-3P3-2P2-P=6×3-5×2-4×1-3×1=1.图(a)所示为某飞机起落架的收放机构。
构件1为原动件,构件1、2和2、3分别组成3级球副,构件1、4和3、4分别组成5级移动副和转动副,其运动示意图如图(b)所示。
试计算该机构的自由度并判断其运动是否确定。
解: n=3, P5=2, P3=2F=6n-5P5-4P4-3P3-2P2-P=6×3-5×2-3×2=1.计算结果表明需要2个原动件机构的运动才能得以确定。
而实际上该机构在1个原动件的带动下运动就能确定了。
上述问题出现在何处?(a) (b)图2.5.2-2构件2的两端同构件1、3分别组成球副,这样使得构件2可以绕自身轴线转动,而这个转动(自由度)对整个机构的运动没有影响,对比平面凸轮机构中滚子的转动一样,称为局部自由度。
图2.5.2-3 对于局部自由度也有两种处理方法:①. 修正自由度计算公式:F=6n-5P5-4P4-3P3-2P2-P1-k 式中:k为局部自由度数。
这样例题2的机构的自由度应为:F=6n-5P5-4P4-3P3-2P2-P1-k=6×3-5×2-3×2-1=1具有确定的运动。
ηη'一、填空题和填空题。
1.在平面机构中若引入H P 个高副将引入H P 个约束,而引入L P 个低副将引入2L P 个约束,则活动构件数n 、约束数与机构自由度F 的关系是F =3n -2L P -H P 。
2.机构具有确定运动的条件是:机构的自由度大于零,且机构自由度数等于原动件数;若机构自由度F>0,而原动件数<F ,则构件间的运动是不确定的;若机构自由度F>0,而原动件数>F ,则各构件之间运动关系发生矛盾,将引起构件损坏。
3.下图为一对心曲柄滑块机构,若以滑块3为机架,则该机构转化为定块机构;若以构件2为机架,则该机构转化为摇块机构。
45678零。
91011。
12.1314.构推程的压力角。
(A )减小(B )增加(C )保持原来15.为了减轻飞轮尺寸和重量,飞轮通常应装在__A_______。
(A )高速轴上(B )低速轴上(C )机架上16.蜗杆蜗轮传动中,模数为m ,蜗杆头数为z 1,蜗杆直径系数为q ,蜗轮齿数为z 2,则蜗杆直径d 1=___C__________。
A )mz 1(B )mz 2(C )mq17.在铰链四杆机构ABCD 中,已知AB =25mm ,BC =70mm ,CD =65mm ,AD =95mm ,当AD 为机架时,是__B____机构;当AB 为机架时,是____A_____机构。
(A )双曲柄机构;(B )曲柄摇杆机构;(C )双摇杆机构18.若机构正反行程效率分别用和表示,则设计自锁机构时应满足要____B_____。
(A)(B)(C)19.机构具有确定运动的条件是__机构的自由度大于零,且机构自由度数等于原动件数____。
20.高副低代必须满足的条件是_代替前后机构的自由度不变_,_代替前后机构的瞬时速度和瞬时加速度不变___________。
21.在曲柄摇杆机构中,当__C____,将出现死点。
(A)曲柄为原动件且曲柄与连杆共线;(B)曲柄为原动件且曲柄与机架共线时;(C)摇杆为原动件且曲柄与连杆共线时;(D)摇杆为原动件且摇杆与机架共线时。