空间机构自由度计算公式的研究
- 格式:doc
- 大小:21.00 KB
- 文档页数:3


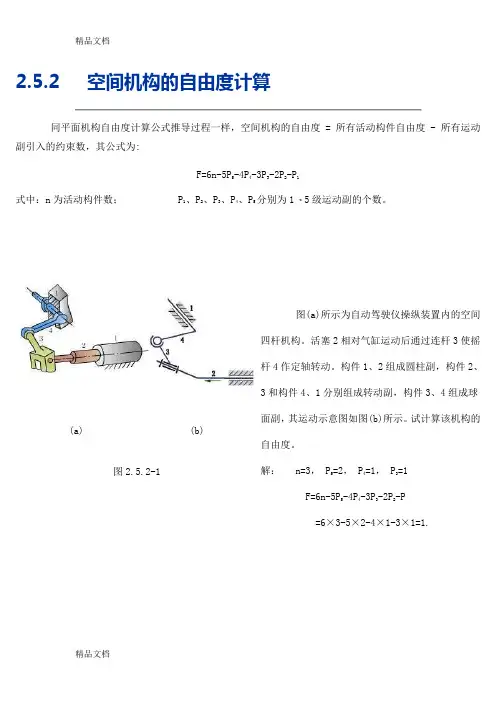
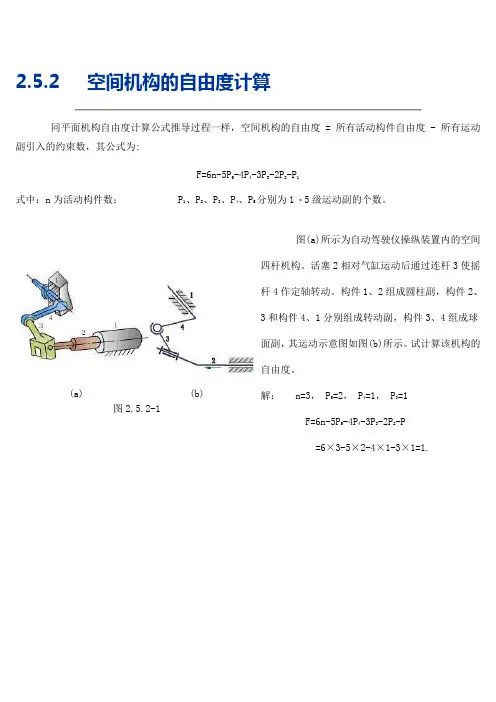
2.5.2空间机构的自由度计算同平面机构自由度计算公式推导过程一样,空间机构的自由度 = 所有活动构件自由度 - 所有运动副引入的约束数,其公式为:F=6n-5P5-4P4-3P3-2P2-P1式中:n为活动构件数; P1、P2、P3、P4、P5分别为1~5级运动副的个数。
(a) (b)图2.5.2-1图(a)所示为自动驾驶仪操纵装置内的空间四杆机构。
活塞2相对气缸运动后通过连杆3使摇杆4作定轴转动。
构件1、2组成圆柱副,构件2、3和构件4、1分别组成转动副,构件3、4组成球面副,其运动示意图如图(b)所示。
试计算该机构的自由度。
解: n=3, P5=2, P4=1, P3=1F=6n-5P5-4P4-3P3-2P2-P=6×3-5×2-4×1-3×1=1.图(a)所示为某飞机起落架的收放机构。
构件1为原动件,构件1、2和2、3分别组成3级球副,构件1、4和3、4分别组成5级移动副和转动副,其运动示意图如图(b)所示。
试计算该机构的自由度并判断其运动是否确定。
解: n=3, P5=2, P3=2F=6n-5P5-4P4-3P3-2P2-P=6×3-5×2-3×2=1.计算结果表明需要2个原动件机构的运动才能得以确定。
而实际上该机构在1个原动件的带动下运动就能确定了。
上述问题出现在何处?(a) (b)图2.5.2-2构件2的两端同构件1、3分别组成球副,这样使得构件2可以绕自身轴线转动,而这个转动(自由度)对整个机构的运动没有影响,对比平面凸轮机构中滚子的转动一样,称为局部自由度。
图2.5.2-3 对于局部自由度也有两种处理方法:①. 修正自由度计算公式:F=6n-5P5-4P4-3P3-2P2-P1-k 式中:k为局部自由度数。
这样例题2的机构的自由度应为:F=6n-5P5-4P4-3P3-2P2-P1-k=6×3-5×2-3×2-1=1具有确定的运动。
自由度怎么计算
自由度计算公式:
1、自由度:具有确定运动所必需要的独立运动参数为机构自由度。
2、自由度计算公式:F=3n-2pl-2ph
n:活动构件数pl:低副数ph:高副数
自由度(degree of freedom, df)指的是计算某一统计量时,取值不受限制的变量个数。
计算公式df=n-k。
其中n为样本数量,k为被限制的条件数或变量个数,或计算某一统计量时用到其它独立统计量的个数。
自由度通常用于抽样分布中。
物理学术语:自由度是指物理学当中描述一个物理状态,独立对物理状态结果产生影响的变量的数量。
如运动自由度是确定一个系统在空间中的位置所需要的最小坐标数。
例如火车车厢沿铁轨的运动,只需从某一起点站沿铁轨量出路程,就可完全确定车厢所在的位置,即其位置用一个量就可确定,我们说火车车厢的运动有一个自由度;
汽车能在地面上到处运动,自由程度比火车大些,需要用两个量(例如直角坐标x,y)才能确定其位置,我们说汽车的运动有两个自由度;飞机能在空中完全自由地运动,需要用三个量(例如直角坐标x,y,z)才能确定其位置,我们说飞机在空中的运动有三个自由度。
所谓自由度数就是确定物体在空间的位置所需独立坐标的数目。
第5章空间机构自由度分析的约束螺旋求解法对机构最基本的认识是要知道它的自由度,机构的自由度计算原本是一个简单的问题,用传统的Kutzbach-Grübler公式[1-3]就可以获得正确的结果,而且仅仅基于算术运算。
这个最基本的问题几乎在所有的教科书上都有论述。
这里为什么还要论及呢?在机构学的发展历程中,发现了不少的机构不符合上述公式[4-5]。
这种情况长期来倒还能容忍,到底当时该公式对于绝大多数机构还是适用的,特别是适用于众多的平面机构。
但是在近十年来当空间机构研究迅速发展时,问题变得突出起来,传统的大家熟悉的这个公式常常算不出正确的结果,特别是在新世纪开始前后的这十年间,国际机构学界开展了少自由度并联机器人新机构的研究,这个不为人们重视的自由度计算却经常让人们迷惑,用公式常常不能够得到正确的结果。
甚至到了新世纪的2002年,美国马里兰大学的Tsai教授在分析他发明一种3自由度并联机构时再次指出,如果用Kutzbach-Grübler公式计算该机构的自由度数将会得到错误的结果[6]。
这样,人们不得不采取其它麻烦的分析方法[7-11],多花费了很多的时间。
究其原因,认识到这是由于在机构中存在过约束(overconstrained)的缘故,约束被重复计算了。
许多人不断寻找新的普遍适用的机构的自由度计算公式,仅举文献[12-13]。
人们提出过许多新概念,包括公共约束、虚约束等等。
文献[14,15]还建议自由度公式中应采用机构螺旋系的“阶”。
在这方面国内也有许多学者进行了有意义的研究,文献[16]以闭合约束数定义公共约束以确定阶,文献[17]以非线性代数方程组的相关性来判定机构的“秩”,然而他却是一个十分困难的求解问题。
考虑“过约束”去对Kutzbach-Grübler公式加以修正,关键是如何分析过约束,到这个新世纪开始,这个问题在国际上一直未能解决。
还有一些学者甚至还采取如李代数和群论[18-20]等现代数学来探讨,也取得了一些进展。

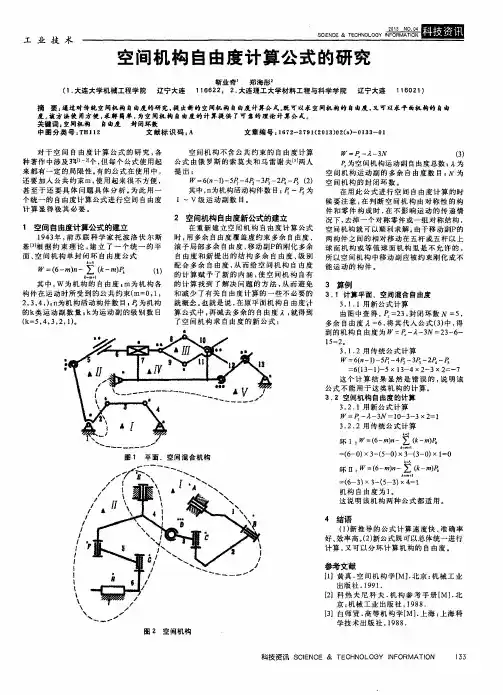
133科技资讯 S CI EN CE & T EC HNO LO GY I NF OR MA TI ON 工 业 技 术对于空间自由度计算公式的研究,各种著作中涉及34[1~2]个,但每个公式使用起来都有一定的局限性。
有的公式在使用中,还要加入公共约束m,使用起来很不方便,甚至于还要具体问题具体分析。
为此用一个统一的自由度计算公式进行空间自由度计算显得极其必要。
1 空间自由度计算公式的建立1943年,前苏联科学家托波洛伏尔斯基[3]根据约束理论,建立了一个统一的平面、空间机构单封闭环自由度公式51(6)()k kk m W m n k m P(1)其中,W 为机构的自由度;m 为机构各构件在运动时所受到的公共约束(m=0,1,2,3,4,);n为机构活动构件数目; k P 为机构的k类运动副数量;k 为运动副的级别数目(k=5,4,3,2,1)。
空间机构不含公共约束的自由度计算公式由俄罗斯的索莫夫和马雷谢夫[5]两人提出:123456(1)5432W n P P P P P (2)其中,n为机构活动构件数目; 1P ~ 5P 为Ⅰ~Ⅴ级运动副数目。
2 空间机构自由度新公式的建立在重新建立空间机构自由度计算公式时,用多余自由度覆盖虚约束多余自由度、滚子局部多余自由度,移动副P的刚化多余自由度和新提出的结构多余自由度、级别配合多余自由度,从而给空间机构自由度的计算赋予了新的内涵,使空间机构自有的计算找到了解决问题的方法,从而避免和减少了有关自由度计算的一些不必要的就概念。
也就是说,在原平面机构自由度计算公式中,再减去多余的自由度 ,就得到了空间机构求自由度的新公式:空间机构自由度计算公式的研究靳业奇1 郑海彤2(1.大连大学机械工程学院 辽宁大连 116622; 2.大连理工大学材料工程与科学学院 辽宁大连 116021)摘 要:通过对传统空间机构自由度的研究,提出新的空间机构自由度计算公式。
2.5.2空间机构的自由度计算同平面机构自由度计算公式推导过程一样,空间机构的自由度 = 所有活动构件自由度 - 所有运动副引入的约束数,其公式为:F=6n-5P5-4P4-3P3-2P2-P1式中:n为活动构件数; P1、P2、P3、P4、P5分别为1~5级运动副的个数。
(a) (b)图2.5.2-1图(a)所示为自动驾驶仪操纵装置内的空间四杆机构。
活塞2相对气缸运动后通过连杆3使摇杆4作定轴转动。
构件1、2组成圆柱副,构件2、3和构件4、1分别组成转动副,构件3、4组成球面副,其运动示意图如图(b)所示。
试计算该机构的自由度。
解: n=3, P5=2, P4=1, P3=1F=6n-5P5-4P4-3P3-2P2-P=6×3-5×2-4×1-3×1=1.图(a)所示为某飞机起落架的收放机构。
构件1为原动件,构件1、2和2、3分别组成3级球副,构件1、4和3、4分别组成5级移动副和转动副,其运动示意图如图(b)所示。
试计算该机构的自由度并判断其运动是否确定。
解: n=3, P5=2, P3=2F=6n-5P5-4P4-3P3-2P2-P=6×3-5×2-3×2=1.计算结果表明需要2个原动件机构的运动才能得以确定。
而实际上该机构在1个原动件的带动下运动就能确定了。
上述问题出现在何处?(a) (b)图2.5.2-2构件2的两端同构件1、3分别组成球副,这样使得构件2可以绕自身轴线转动,而这个转动(自由度)对整个机构的运动没有影响,对比平面凸轮机构中滚子的转动一样,称为局部自由度。
图2.5.2-3 对于局部自由度也有两种处理方法:①. 修正自由度计算公式:F=6n-5P5-4P4-3P3-2P2-P1-k 式中:k为局部自由度数。
这样例题2的机构的自由度应为:F=6n-5P5-4P4-3P3-2P2-P1-k=6×3-5×2-3×2-1=1具有确定的运动。
算自由度的公式
1. 平面机构自由度计算公式。
- 对于平面机构,自由度计算公式为F = 3n - 2P_L-P_H。
- 其中n为活动构件数。
- P_L为低副(转动副和移动副)的数目。
- P_H为高副(例如齿轮副、凸轮副等)的数目。
2. 空间机构自由度计算公式(拓展)
- 空间机构自由度的计算相对复杂,常用的公式为F = 6n - 5P_5-4P_4-3P_3-2P_2-P_1。
- 这里n为活动构件数。
- P_5为五级副(相当于有5个相对运动自由度受到约束的运动副)的数目。
- P_4为四级副的数目,以此类推。
在人教版的机械原理相关教材中,平面机构自由度的计算是一个重要的基础内容,在分析机构的运动可能性和确定性方面有着关键的作用。
例如在分析平面连杆机构、凸轮机构等的运动时,通过计算自由度可以判断机构是否具有确定的运动等情况。
自由度的计算方法一、自由度的基本概念。
1.1 自由度是什么呢?简单来说,它就像是一个系统或者对象能够自由活动或者变化的“空间”大小。
打个比方,就像一个人在一个大房间里,他可以到处走动,这个走动的范围就有点像自由度。
在科学和数学的世界里,自由度有着非常精确的定义,但咱先从这种比较形象的方式去理解它。
1.2 自由度可不是一个抽象到摸不着头脑的东西。
比如说,一个单摆,它只能在一个平面内来回摆动,它的自由度相对就比较小。
这就好比一个人被限制在一条小道上活动,能做的动作很有限。
二、自由度在不同领域的计算方法。
2.1 在统计学里。
统计学中的自由度计算就像是一场有趣的解谜游戏。
比如说,我们有一组数据,要计算样本方差。
这里面自由度的计算就和样本数量有关。
如果我们有n个样本,那么计算样本方差时的自由度就是n 1。
这就好像是我们本来有n个可以自由变动的数,但因为要满足一些条件,就像被抽走了一点“自由”,少了1个自由度。
这就如同一个团队有n个人,但是有一个人要负责协调整体,不能完全自由行动,所以真正能自由发挥的就少了一个。
2.2 在物理学中。
物理学里自由度的计算更加直观。
像一个刚体在空间中的运动,它有平动和转动。
一个刚体在三维空间中的平动有3个自由度,这就像一个小方块可以在前后、左右、上下三个方向移动,这是它的平动自由度。
然后呢,刚体绕着三个坐标轴的转动又有3个自由度,总共就是6个自由度。
这就好比一个会翻跟头、能到处跑的杂技演员,他有多种动作方向的可能性,这些不同方向的动作就构成了他的自由度。
2.3 在机械工程领域。
机械工程里自由度也很重要。
例如一个简单的平面机构,由一些杆件和关节组成。
我们要计算这个机构的自由度,就要考虑杆件的数量、关节的类型等因素。
这里面有一个公式,F = 3n 2PL PH(这里F是自由度,n是杆件数,PL是低副的数量,PH 是高副的数量)。
这就像一个复杂的机械拼图,每个杆件和关节就像拼图的小碎片,我们要根据它们的数量和类型来算出这个机械结构整体能有多少“活动空间”,也就是自由度。
2023年第47卷第5期Journal of Mechanical Transmission基于修正的G-K公式的组合机构自由度的计算许兆棠(三江学院机械与电气工程学院,江苏南京210012)摘要用修正的Grübler-Kutzbach的机构自由度计算公式,计算组合机构的自由度,有时会产生错误的结果。
为了正确计算组合机构的自由度,并考虑计算组合机构自由度的方法便于工程技术人员学习和应用,根据修正的Grübler-Kutzbach的机构自由度计算公式,导出组合机构自由度的计算公式,得到机构自由度的一般计算公式;提出计算组合机构自由度的注意事项,给出了组合机构划分为基本机构的方法,并给出了算例。
修正的Grübler-Kutzbach的机构自由度计算公式只能用于1个基本机构的自由度计算及各个基本机构的公共约束相同的机构自由度计算;对于一般的组合机构,要用组合机构自由度的公式计算其自由度。
组合机构自由度等于各个基本机构自由度的和。
关键词组合机构自由度计算基本机构公共约束Calculation of Mobility on Combined Mechanisms Based on theModified G-K's FormulaXu Zhaotang(School of Mechanical and Electrical Engineering, Sanjiang University, Nanjing 210012, China)Abstract Using the modified Grübler-Kutzbach's formula of mechanism mobility, the calculation of the mobility of combined mechanism may produce wrong results. In order to correctly calculate the mobility of com⁃bined mechanism, and to consider that the calculation method of the mobility of combined mechanism is conve⁃nient for engineers for study and application, according to the modified Grübler-Kutzbach's formula of the mech⁃anism mobility, the calculation formula of mobility of combined mechanism is deduced. The general calculation formula of mobility of mechanism is obtained. The attentions of calculating mobility of combined mechanism are proposed. The method of dividing the combined mechanism into basic mechanisms is given. Numerical examples are given. The modified Grübler-Kutzbach's formula of mechanism mobility can only be used to calculate mobil⁃ity of a basic mechanism, and to calculate mobility of combined mechanism in that each basic mechanism has the same common constraint. The mobility of general combined mechanism should be calculated by the calcula⁃tion formula of mobility of combined mechanism. The mobility of combined mechanism is equal to the sum of the mobility of each basic mechanism.Key words Combined mechanism Mobility Calculation Basic mechanism Common constraint0 引言修正的Grübler-Kutzbach的机构自由度计算公式(简称修正的G-K公式)早已编入中外许多教科书中[1]115-116[2]42-48,并已为众多工程师所熟悉和运用。
机构自由度的概念
机构自由度(Degree of Freedom, DoF)是机械原理中的一个核心概念,它描述了一个机构在没有外力或驱动力作用下能够独立完成的运动的数量。
具体来说:
机构自由度定义:
在一个机械机构中,为了确定该机构所有构件的相对位置和姿态,所需要的独立运动参数的数量称为机构的自由度。
- 对于单个构件而言,在三维空间中,它有6个自由度,包括沿三个正交方向(X、Y、Z轴)的平动自由度以及绕这三个轴的转动自由度。
- 当多个构件通过运动副(如铰链、滑块等)相互连接组成机构时,由于运动副对构件的约束作用,实际的机构自由度会小于各个独立构件自由度之和。
- 机构的总自由度计算公式为:总自由度= 各构件自由度之和- 约束数(即由运动副引入的约束数目)。
- 在实际应用中,如果机构具有一个或多个原动件(例如电机、气缸等驱动部件),并且原动件提供的独立输入变量与机构自由度相
匹配,则机构可以实现确定的、预设的运动。
平面机构自由度通常指机构在二维平面内的自由度,一般包括沿两个正交方向的移动自由度及一个绕垂直于平面轴的转动自由度。
总结来说,机构自由度是评价机构运动特性的重要指标,对于设计和分析机械设备有着至关重要的意义。
只有当机构的自由度等于零时,机构才是完全刚性固定的结构;而具有至少一个自由度的机构才能够产生相对运动,并可能成为有用的机械装置。
自由度计算例题在机械原理、结构力学等工程学科中,自由度的计算是一个非常重要的概念。
它有助于我们理解和分析物体或系统的运动可能性,从而为设计和优化提供关键的依据。
下面,我们通过几个具体的例题来深入探讨自由度的计算。
例题一:平面机构自由度计算考虑一个平面四杆机构,由四个杆件通过转动副连接而成。
其中,杆件 1 与机架通过转动副连接,杆件 2 与杆件 1 和杆件 3 分别通过转动副连接,杆件 3 与杆件 2 和杆件 4 分别通过转动副连接,杆件 4 与机架通过转动副连接。
首先,我们需要确定活动构件的数量。
在这里,杆件 1、2、3、4 为活动构件,共 4 个。
然后,计算低副的数量。
转动副的数量为 5 个。
接下来,计算高副的数量。
由于此机构中没有高副,所以高副数量为 0。
根据平面机构自由度的计算公式:F = 3n 2PL PH (其中,F 表示自由度,n 表示活动构件数,PL 表示低副数,PH 表示高副数),将数值代入公式可得:F = 3×4 2×5 0 = 12 10 0 = 2这意味着该平面四杆机构具有 2 个自由度,即它有两种独立的运动方式。
例题二:空间机构自由度计算假设有一个空间六面体机构,由六个杆件通过球铰连接而成。
同样,先确定活动构件的数量,这里是 6 个。
接着,计算低副的数量。
由于是球铰连接,每个连接点都相当于 3个低副,所以低副总数为 3×6 = 18 个。
高副数量为 0。
再根据空间机构自由度的计算公式:F = 6n 5PL 6PH ,代入数值计算:F = 6×6 5×18 0 = 36 90 0 =-54出现负数的自由度是不符合实际情况的,这说明该机构的约束过多,无法实现自由运动,可能是设计上存在问题。
例题三:含有复合铰链的机构自由度计算考虑一个平面机构,其中有三个杆件依次通过转动副连接,在杆件2 和杆件3 的连接点处,还有一个杆件通过转动副与它们相连,形成了一个复合铰链。
运泵功下,随着铜水纳米流体体积分数的升高和凹槽深宽比的增大,凹槽微通道壁面温度T w降低;流经凹槽微通道流体压降增幅较小㊂对于同一体积分数的铜水纳米流体,流体输运泵功增大,凹槽微通道外壁面温度降低;与深宽比为0.3的凹槽微通道相比,深宽比为0.5的凹槽微通道壁面温度较低㊂输运流体动力即泵功增强,凹槽微通道流速增大,微通道对流换热增强,同时,微通道流量增大,相对较多的热量被迁移;凹槽深宽比的增大,使得凹槽微通道传热面积增大;在一定范围内,体积分数较高的铜水纳米流体具有相对较高的热导率,有利于微通道内的强化传热㊂此外,由图9可见,铜水纳米流体流经凹槽微通道的压降随流体输运泵功增大而升高㊂铜水纳米流体体积分数对流经凹槽微通道的流体阻力和输运动力影响较小㊂3 结论本文针对铜水纳米流体在圆弧型凹槽微通道中的传热与流动进行了分析㊂数值分析结果表明:纳米流体浓度㊁流体输运动力因子和凹槽深宽比对凹槽强化微通道传热影响较大㊂(1)铜水纳米流体在微通道的流速比纯水(φ=0%)在微通道的流速低,并随纳米粒子体积分数升高和凹槽截面的增大而降低㊂与基液纯水相比,铜水纳米流体具有较高的热导率和热容量,能迁移相对较多的热流密度,因此,纳米流体具有显著降低微通道壁面温度和流体工质的温度的作用㊂(2)与无凹槽平板型微通道相比,微通道圆弧型凹槽内壁面处流体的流速相对较低,对流传热系数相对较小,并随凹槽深宽比的增大而下降㊂凹槽内流体的对流传热系数由凹槽上游区至下游区逐渐增大㊂受凹槽深宽比和纳米流体流速影响,在强化圆弧型凹槽微通道传热中,纳米流体存在一个优化的浓度范围㊂(3)在同样流体输运泵功下,随着铜水纳米流体体积分数㊁凹槽深宽比以及输运流体泵功的增大,凹槽微通道壁面温度降低㊂铜水纳米流体流经凹槽微通道压降随流体输运泵功增大而升高㊂铜水纳米流体体积分数和凹槽深宽比对流经凹槽微通道的流体阻力和输运动力影响较小㊂参考文献:[1] S o l o v i t zSA,C o n d e rTE.F l o wa n dT h e r m a l I n v e s-t i g a t i o no f aG r o o v e‐e n h a n c e d M i n i c h a n n e lA p p l i c a-t i o n[J].J o u r n a l o fT h e r m a l S c i e n c e a n dE n g i n e e r i n gA p p l i c a t i o n s,2010,2(1):011008.[2] L i uY,C u i J,J i a n g YX,e t a l.A N u m e r i c a l S t u d y o nH e a tT r a n s f e rP e r f o r m a n c eo f M i c r o c h a n n e l s w i t hD i f f e r e n t S u r f a c e M i c r o s t r u c t u r e s[J].A p p l i e dT h e r m a l E n g i n e e r i n g,2011,31(5):921‐931. [3] C h o i SUS.E n h a n c i n g T h e r m a l C o n d u c t i v i t y o fF l u i d sw i t hN a n o‐p a r t i c l e s[J].D e v e l o p m e n t s a n dA p p l i c a t i o n s o fN o n‐n e w t o n i a nF l o w s,1995,231(66):99‐103. [4] 凌智勇,朱爱军.层流状态下纳米流体的对流换热特性[J].功能材料,2010,41(6):948‐951.L i n g Z h i y o n g,Z h u A i j u n.T h e C o n v e c t i v e H e a tT r a n s f e r C h a r a c t e r i s t i c s o f N a n o f l u i d s u n d e rt h eL a m i n a rF l o w C o n d i t i o n s[J].J o u r n a l o fF u n c t i o n a lM a t e r i a l s,2010,41(6):948‐951.[5] D oK H,J a n g SP.E f f e c t o fN a n o f l u i d s o n t h eT h e r-m a l P e r f o r m a n c eo f aF l a t M i c r o H e a tP i p ew i t haR e c t a n g u l a rG r o o v e d W i c k[J].I n t e r n a t i o n a l J o u r n a l o fH e a t a n d M a s sT r a n s f e r,2010,53(9/10):2183‐2192.[6] 杨卫卫,何雅玲.凹槽通道中脉动流动传质的数值研究[J].西安交通大学学报,2004,389(11):1119‐1122.Y a n g W e i w e i,H e Y a l i n g.N u m e i c a lS t u d y o n E n-h a n g c i n g M a s sT r a n s f e r i nG r o o v e dC h a n n e l b y P u l-s a t i n g F l o w[J].J o u r n a l o fX i’a nJ i a o t o n g U n i v e r s i-t y,2004,38(11):1120‐1122.[7] A n d r e wF,R a m e s hN,C h a n d r a t i l l e k eT T.L a m i n a rC o n v e c t i v e H e a t T r a n s f e ri na M i c r o c h a n n e l w i t hI n t e r n a l L o n g i t u d i n a lF i n s[J].I n t e r n a t i o n a l J o u r n a lo fT h e r m a l S c i e n c e s,2009,48(10):1908‐1913. [8] N a m b u r uPK,D a sD K,T a n g u t u r iK M,e t a l.N u-m e r i c a l S t u d y o fT u r b u l e n t F l o wa n dH e a tT r a n s f e rC h a r a c t e r i s t i c so f N a n o f l u i d s C o n s i d e r i n g V a r i a b l eP r o p e r t i e s[J].I n t e r n a t i o n a l J o u r n a l o fT h e r m a l S c i-e n c e s,2009,48(2):290‐302.[9] 李强,宣益民.纳米流体能量传递理论与应用[M].北京:科学出版社,2010.[10] 李强,宣宜民.铜水纳米流体流动与对流换热特性[J].中国科学,2002,32(3):331‐337.L iQ i a n g,X u a n Y i m i n.F l o wa n dC o n v e c t i v e H e a tT r a n s f e r C h a r a c t e r i s t i c s o f C u‐w a t e r N a n o f l u i d[J].S c i e n c e i nC h i n a,2002,32(3):331‐337.(编辑 王艳丽)作者简介:陈 威,男,1968年生㊂上海海事大学商船学院教授㊂研究方向为纳米流体㊁多孔介质传热与流动和电子电器冷却㊂发表论文30余篇㊂黎源源,女,1989年生㊂上海海事大学商船学院硕士研究生㊂林 俊,男,1989年生㊂上海海事大学商船学院硕士研究生㊂㊃2822㊃中国机械工程第25卷第17期2014年9月上半月Copyright©博看网. All Rights Reserved.新的机构自由度计算公式 G O M 公式的应用研究卢文娟 张立杰 曾达幸 张一同1.燕山大学先进锻压成形技术与科学教育部重点实验室,秦皇岛,0660042.燕山大学河北省重型机械流体动力传输与控制实验室,秦皇岛,066004摘要:总结了利用G OM 公式计算机构自由度的具体步骤,列举了常用基础杆组的位移参数,介绍了杆组阶的确定方法;给出计算输出构件自由度及快速判断构件运动性质的方法;选取了几种典型的机构验证了所提出方法的正确性㊂结果表明,该新公式可以避开虚约束计算,不需要借助复杂的数学工具,便能快速㊁有效地计算包括混联机构在内的机构自由度,其正确性与通用性在一定程度上得到了验证㊂关键词:自由度;虚约束;多环耦合;杆组参数中图分类号:T H 112 D O I :10.3969/j.i s s n .1004-132X.2014.17.003R e s e a r c ho nA p p l i c a t i o no fG O M F o r m u l a -aN o v e lM o b i l i t y Fo r m u l a L u W e n j u a n Z h a n g L i j i e Z e n g D a x i n g Z h a n g Y i t o n g1.K e y L a b o r a t o r y o fA d v a n c e dF o r g i n g &S t a m p i n g T e c h n o l o g y an dS c i e n c e ,M i n i s t r y o fE d u c a t i o no fC h i n a ,Y a n s h a nU n i v e r s i t y ,Q i n h u a n gd a o ,He b e i ,0660042.H e b e i P r o v i n c i a lK e y L a b o r a t o r y o fH e a v y M e c h i n e r y Fl u i dP o w e rT r a n s i m i s s i o na n dC o n t r o l ,Y a n s h a nU n i v e r s i t y ,Q i n h u a n gd a o ,He b e i ,066004A b s t r a c t :B a s e do nan e w m e t h o d ‐G OMf o r m u l ar e f e r r e dt ob e f o r e ,w h i c h w a se x pr e s s e d w i t h D O Fo f g e n e r a l l i n k ‐g r o u p ”,s t e p s o f c a l c u l a t i n g D O Fw i t h t h i s i d e aw e r e e s t a b l i s h e d f i r s t l y .M e a n -w h i l e ,d i s p l a c e m e n t p a r a m e t e r s o f b a s i c l i n k ‐g r o u p s c o mm o n l y u s e dw e r e l i s t e da n dam e t h o do f d e -t e r m i n i n g t h e r a n ko f l i n k ‐g r o u p w a s i n t r o d u c e d .S e c o n d l y ,a t h e o r y w h i c hc o u l d q u i c k l y de t e r m i n e t h eD O Fa n dm o t i o nc h a r a c t e r i s t i c so fo u t p u t p a r tw a sd e t e r m i n e d .F i n a l l y s e v e r a l t y p i c a l e x a m p l e sf r o mt h e l i t e r a t u r ew e r e p e r f o r m e d t o i l l u s t r a t e t h e a c c u r a c y a n d v a l i d i t y o f t h e n e wt h e o r y me n t i o n e d a b o v e .T h e r e s u l t s s h o wt h a t t h i sn e wf o r m u l a c a na v o i dc a l c u l a t i ng vi r t u a l c o n s t r a i n t s ,a n dw i t h o u t t h e a i do f s o p h i s t i c a t e dm a t h e m a t i c a l t o o l ,t h eD O F s o fm e c h a n i s m s i n c l u d i n g h y b r i dm e c h a n i s m s c a n b e c a l c u l a t e d q u i c k l y a n d a v a i l a b l y .I n s h o r t ,i t s a c c u r a c y a n d v e r s a t i l i t y ge t a t e s t i n a c e r t a i n e x t e n t .K e y wo r d s :d e g r e e so f f r e e d o m (D O F );v i r t u a lc o n s t r a i n t ;m u l t i ‐l o o p c o u p l i n g ;p a r a m e t e ro f l i n k ‐g r o u p收稿日期:2013 04 10基金项目:国家自然科学基金资助项目(51275438);河北省高等学校科学技术研究项目(Q N 2014175);秦皇岛市科学技术研究与发展计划资助项目(201101A 069)0 引言对于机构自由度的研究要追溯到十九世纪后期,长期以来一直沿用的计算自由度的公式为G ‐K 公式[1‐2],该公式遵从 自由运动构件通过运动副组成机构时,由于运动副的约束,其构件自由度将减少”的思路,适用于平面机构和空间机构的自由度计算㊂然而随着机构学的发展,新机构的不断提出,出现了许多反例[3‐4],因而这个公式也就不能认为是 通用”的公式㊂究其原因可知:建立该公式的前提是所有 广义杆组”(每个独立环路与其相邻环路不重复独立杆件的组合,以下简称为 杆组”)产生的约束都是独立的,实际上并联机构中经常出现重复约束的情况(被称为 冗余约束”或 虚约束”)[5]㊂有缺陷的机构自由度计算公式往往制约着性能优异的新型实用机构的综合和应用[6]㊂为解决G ‐K 公式不能处理虚约束的问题,各国学者从避开虚约束的角度考虑,提出了各种形式不同的自由度计算公式㊂近十年间提出具有代表性的公式有:G o g u [7]基于线性变换方法用支链运动参数表示环路的自由度公式㊁杨廷力等[8]基于机构的方位特征集方程提出的可得到机构整周自由度的计算公式㊁R i c o 等[9‐10]基于李群李代数的理论,用支链位移子群维数和复合子群维数表示的自由度计算公式,以及Z h a n g 等[11‐12]基于虚拟环路和虚拟环约束提出的自由度计算公式㊂㊃3822㊃新的机构自由度计算公式 G OM 公式的应用研究卢文娟 张立杰 曾达幸等Copyright ©博看网. All Rights Reserved.基于此,为揭示杆组自由度对机构自由度的影响,从避开虚约束计算角度考虑,笔者提出了用杆组的自由度和输出杆基点位移参数的阶来表示自由度的公式 G OM(m o b i l i t y o f g r o u p sa n d o u t p u t p a r a m e t e r)公式㊂1 G OM公式理论1.1 G O M公式机构是由机架㊁输出构件以及连接机架和输出构件的各个杆组所组成的,则机构自由度和广义杆组的自由度及输出的位移参数之间存在着一定的关系㊂从这个思想出发,本课题组在之前的研究中提出了一种通过对各杆组位移参数的交集运算来反映输出参数的新自由度公式,简称为G OM公式[13],即F k=∑P k i=1f i-d g z k(1)F=∑L+1k=1F k+d B(2)其中,F k为第k个杆组的自由度;P k为第k个杆组中运动副的数目;L为机构中独立环路的数目;d g z k 为第k个杆组的位移参数(包括线位移和角位移)的阶,d g z k=d i m G g z k=d i m{α,β,γ,x,y,z},可写为d g z k{α,β,γ,x,y,z}㊂α㊁β㊁γ,x㊁y㊁z是形式参数,分别代表相对三个坐标轴的转动和移动,G g z k表示杆组的位移参数集合,G g z k={α,β,γ,x,y,z}㊂d B为基点位移参数集合的阶,d B=d i m O B㊂O B表示基点的位移集合,O B={α,β,γ,x,y,z}㊂1.2 杆组有效参数的交集规则基点参数O B是杆组有效参数G g z k的交集,即O B=∩L+1k=1G g z k(3)这就是杆组有效参数的交集定理,简称为交集规则㊂同时,基点参数的维数满足:d B=d i m(∩L+1k=1G g z k)(4)由于构件特定尺寸和运动副位置和方向的限定,失去作用的杆组位移参数称为无效参数,没有失去作用的位移参数称为有效参数㊂该规则的提出为更好地计算基点的位移参数㊁正确计算机构自由度㊁判断平台的运动性质提供了参考依据㊂2 杆组位移参数的确定2.1 G O M公式计算机构自由度的一般步骤以上述的G OM理论和公式为基础,总结机构自由度计算的步骤如下:(1)根据 机架上的坐标系建立必须遵守基点位移参数最少的原则”建立机构在一般位置时的全局坐标系[13]㊂(2)写出各杆组的位移参数集合,判断是否存在无效参数,即得到杆组的有效位移参数㊂(3)根据式(1)计算各杆组的自由度㊂(4)根据 交集规则”,即式(3)求输出构件上基点的位移参数㊂(5)利用式(2)计算机构自由度㊂(6)根据基点的位移参数与各杆组自由度判断输出构件的运动性质㊂2.2 杆组位移参数的确定用G OM公式正确计算机构的自由度,关键在于各杆组位移参数的确定㊂在坐标系一定的情况下,杆组的位移参数取决于运动副类型㊁轴线关系等因素㊂组成空间机构运动副常用的有转动副(R)㊁移动副(P)㊁螺旋副(H)㊁圆柱副(C)㊁球面副(S)㊁虎克铰(U)等㊂而对于圆柱副㊁球面副㊁虎克铰等多自由度运动副又可以认为是由轴线满足一定几何关系的转动副和移动副组成㊂所以本文中重点讨论由移动副和转动副构成的杆组的位移参数㊂对于由单个运动副构成的杆组的位移参数可根据以下原则确定: 杆组中含有哪个方向的移动运动副(包含移动副㊁圆柱副㊁螺旋副),便会产生对应的线位移参数或位移参数分量;杆组中有绕哪个轴线转动的转动运动副(包含转动副㊁圆柱副㊁球铰链㊁虎克铰),便有该轴线方向所对应的角位移参数”,这是确定杆组位移参数的两个基本原则㊂而由多个移动副串联构成的杆组,其杆组位移参数为各运动副产生位移参数的直接叠加㊂由移动副构成杆组产生位移参数的情况相对比较简单,只需根据移动副的轴线方向来确定可能产生的线位移分量即可㊂但是对于由轴线满足一定几何条件的多个转动副构成的杆组,除产生的角位移参数外,同时还会产生伴随的线位移参数,杆组参数不再是简单的角位移参数叠加,其结果与运动副的位置㊁连接情况㊁轴线方向等有关,对其确定较复杂㊂为方便描述,这里我们把 由多个运动副组成,除了会产生各个独立运动副对应的位移参数外,由于运动副的组合同时还会产生其他位移参数的杆组单元称为基础杆组”㊂本文列出了轴线满足表1中所列几种情况时基础杆组的位移参数㊂㊃4822㊃中国机械工程第25卷第17期2014年9月上半月Copyright©博看网. All Rights Reserved.表1 基础杆组的位移参数序号图示说明杆组位移参数集合G g z k位移参数的阶d g z k备注1移动副轴线沿着x 方向{0,0,0,x ,0,0}1当轴线沿着某坐标轴方向时,有一个该方向的线位移参数;如果移动轴线在平面内,有两个线性相关的线位移参数;轴线在空间则具有三个线性相关的线位移参数2转动副轴线沿着x 方向{α,0,0,0,0,0}1当转动轴线沿着某坐标轴方向时,有一个该方向的角位移参数;同理,如果转动轴线在平面内,有两个线性相关的角位移参数;轴线在空间则具有三个线性相关的角位移参数3两个转动副轴线垂直(分别设为x 方向和z 方向)且相交(即U 副){α,0,γ,0,0,0}2 两个角位移参数线性无关4两个转动副轴线垂直但中心不重合,设两个转动轴线分别为x 方向和y 方向{α,β,0,0,0,0}2 两个角位移参数线性无关5两个转动副轴线平行,且轴线方向不垂直于连杆{α,0,0,0,y ,z }3y 和z 是两个线性相关的线位移参数6 转动副轴线重合{α,0,0,0,0,0}1不管轴线共线的转动副的个数为多少,均不产生线位移参数7两个转动副轴线平行,且连杆沿着两个轴线的公垂线方向,为使杆组参数最少,沿着杆的方向建立y 轴{α,0,0,0,0,z }2不产生沿着连杆方向的线位移参数8三个转动副轴线平行{α,0,0,0,y ,z }3产生一个沿着轴线方向的角位移参数和垂直于该轴线方向的两个线位移参数,且三个参数线性无关9两个转动副轴线汇交{α,β,γ,0,0,0}3三个角位移参数线性相关,不产生线位移参数10三个转动副轴线汇交{α,β,γ,0,0,0}3三个角位移参数完全独立,不产生线位移参数注:表中坐标系的建立遵循使杆组 位移参数最少”的原则,尽可能沿着杆组中运动副轴线方向建立坐标轴;轴线汇交的情况 坐标原点和汇交点重合㊂机构中的复杂杆组均是由运动副按照一定方式连接在一起的㊂当各个连杆通过运动副串接在一起组成杆组时,以表1所列基础杆组的位移参数作为参考,根据杆组中运动副的类型及轴线关系,将所有基础杆组产生的位移参数进行叠加便可确定整个杆组的位移参数,从而便于后续自由度的计算㊂3 几种典型机构的自由度计算3.1 输出构件的自由度与运动性质对于并联机构我们习惯上选取动平台作为输出构件,以下实例中如果不特别指明,输出构件均㊃5822㊃新的机构自由度计算公式 G OM 公式的应用研究卢文娟 张立杰 曾达幸等Copyright ©博看网. All Rights Reserved.指动平台㊂而我们通常所说的 机构的自由度性质”实际指的是 输出构件的自由度性质”㊂只有当指定了机构的输出构件,这时对输出构件自由度性质的研究才具有意义㊂在研究自由度性质之前首先要了解 构件的自由度”:根据G OM公式的意义,公式中基点是输出构件上的点,其位移参数O B中独立参数的数目便是 构件的自由度”,构件的自由度数目总是小于等于机构的自由度数目㊂杆组的自由度表示了该杆组对输出构件运动的一种约束,如果机构中存在自由度小于零的杆组,则输出参数不全部独立[11](输出参数全部独立的充要条件是:所有广义杆组的自由度大于等于零),当自由度为-n的杆组连接输出构件和机架时,便使得输出参数的最大线性无关数减少n,即输出构件的自由度会减少n㊂所以输出构件的自由度数目F'=d B+∑F k'(F k'指所有小于零的杆组自由度)㊂如果机构中不含自由度大于零的杆组,则讨论下述几种情况:(1)当d B>F时,即当基点的位移参数的阶大于机构自由度数目时,则输出构件的自由度等于机构自由度数目F,基点的输出参数不全部独立,其中只有F个参数是独立参数,独立的位移参数表示输出构件的独立运动㊂(2)当d B=F时,输出构件的自由度等于机构自由度数目F,基点的输出参数全部独立,基点的位移参数表示输出构件的运动性质㊂(3)当d B<F时,d B表示输出构件的自由度数目,并且输出构件的自由度数目小于机构自由度数目,基点的位移参数表示输出构件的运动性质㊂3.2 单闭环机构的自由度图1所示为一个单闭环空间平行5H机构,空间5个具有不同节距且轴线平行的螺旋副依次相连㊂沿着各个螺旋副轴线的方向设为z方向,建立图1所示的坐标系㊂图1 空间平行5H机构3.2.1 选取机构中构件2作为输出构件根据2.2节中杆组位移参数确定的方法得到,杆组H1H2的阶为d H1H21=d i m{0,0,γ,x,y,z}=4杆组H5H3的阶为d H5H32=d i m{0,0,γ,x,y,z}=4根据式(1)计算杆组的自由度分别为F H1H2=∑P1i=1f i-d H1H21=2-4=-2F H5H3=∑P2i=1f i-d H5H32=3-4=-1根据交集规则,即式(3)得到基点的阶为d B=d i m(G H1H21∩G H5H32)=4将上述结果代入式(2)可得机构自由度:F= F H1H2+F H5H3+d B=-2-1+4=1,即该机构的自由度数目为1㊂其中d B>F,此时输出构件的自由度应等于机构自由度,即构件2的自由度为1,基点的阶为4,即四个位移参数γ,x,y,z中只有一个为独立参数㊂3.2.2 选取机构中构件4作为输出构件杆组H1H4的阶为d H1H41{0,0,γ,x,y,z}=4F H1H4=∑P1i=1f i-d H1H41=4-4=0杆组H5的阶为d H52{0,0,γ,0,0,0}=1F H5=∑P2i=1f i-d H52=1-1=0根据交集规则得到基点的阶为d B=d i m(G H1H41∩G H52)=1将结果代入式(2)得到该机构自由度为F= F H1H4+F H5+d B=0+0+1=1,即该机构的自由度数目为1㊂其中,d B=F,此时输出构件的自由度等于机构自由度,即构件4的自由度为1,基点的阶为1,输出参数全部独立,基点的位移参数表示输出构件的运动性质,构件4具有一个绕着z 轴转动的自由度㊂该实例说明无论把机构中哪个构件作为输出构件,都可以正确计算出机构的自由度,机构的自由度数目与输出构件的选择无关㊂这也是验证自由度计算正确与否的一种方法㊂3.3 过约束”机构的自由度图2所示为K i m和T s a i于2002年提出的C P M机构,是G o g u总结的 不服从G‐K公式的反常机构”中一种典型的现代并联机构3‐P R R R㊂由于该机构中存在虚约束,致使一些自由度公式无法正确计算其自由度㊂该机构中连接基座和动平台的三个杆组相互垂直分布,每个杆组的四个运动副均保持平行,所㊃6822㊃中国机械工程第25卷第17期2014年9月上半月Copyright©博看网. All Rights Reserved.以可以沿着三个杆组运动副轴线的方向分别建立坐标轴,如图2所示㊂图2 C P M机构[5]根据杆组位移参数确定的方法,每个杆组中三个转动副轴线平行,满足表1中的第8种情况,产生一个角位移参数和两个线位移参数,同时与定平台相连的移动副可以产生一个该方向的线位移参数,则可得到三个杆组的位移参数集合分别为G g z1={α,0,0,x,y,z}G g z2={0,β,0,x,y,z}G g z3={0,0,γ,x,y,z}经简单判断不存在无效参数,则得到各杆组的阶d g z1=d g z2=d g z3=4㊂将以上结果代入式(1)中,计算得到各杆组的自由度分别为F1=∑P1i=1f i-d g z1=4-4=0F2=∑P2i=1f i-d g z2=4-4=0F3=∑P3i=1f i-d g z3=4-4=0根据 交集规则”得到输出构件上基点的位移参数的阶:d B=d i m(G g z1∩G g z2∩G g z3)=d i m{0,0,0,x,y,z}=3将上述结果代入式(2)中计算得到该机构的自由度为F=F1+F2+F3+d B=0+0+0+3=3对结果进行简单分析可知:d B=F,此时输出构件的自由度等于机构自由度,动平台的自由度为3;基点的阶为3,输出参数全部独立,基点的位移参数表示输出构件的运动性质,即动平台具有3个移动自由度㊂3.4 分支含闭环的机构的自由度对分支中含有闭环的机构的自由度进行分析比较复杂,给机构自由度计算带来新的问题㊂该类机构中在某个杆组中嵌着另外一个闭环杆组,对其自由度的计算,常用的方法是:把子闭环看作一个多自由度的 广义运动副,直接以串联链代替它”[5]或者 将子闭环看作子并联机构来对待”[8]㊂随着机构学的发展,越来越多的该类机构被综合得到,这便需要有一种更简单有效的方法去计算该种机构的自由度㊂以O r t h o g l i d e操作机[14]为例,用G OM公式的思想和方法对该类分支中含有闭环的机构的自由度进行分析㊂图3所示的机构中,包含3个杆组,并且每个杆组都有一个平行四边形机构㊂参照运动副轴线的方向,建立图3所示的坐标系㊂各个杆组均含有封闭环路,每个杆组可以看作是一个混联的杆组,计算该杆组的自由度关键是计算该杆组的阶㊂3个杆组结构相同,我们首先选取其中的1个杆组A B C进行分析㊂图3 O r t h o g l i d e操作机[5]A B C杆组中与定平台相连的运动副为移动副A,方向沿着x方向,与动平台相连的是一个轴线为z方向的转动副C,其结构可以看作是4个轴线方向为y方向的转动副D㊁E㊁F㊁G并联,再与两个z方向的转动副㊁一个x方向的移动副串联构成的杆组㊂首先计算由转动副D㊁E㊁F㊁G组成的并联部分的阶:d i m(G D G∩G E F)=d i m({0,β,0,x,0,z}∩{0,0,0,x,0,z})=d i m{0,0,0,x,0,z}=d i m G B其中,G B表示该并联部分的位移参数,E F杆组的角位移参数是无效参数,该闭环的自由度为f i B=F D G+F E F+d i m(G B{0,0,0,x,0,z}=(∑2i=1f i-d i m(G D G{0,β,0,x,0,z})+(∑2i=1f i-d i m(G E F{0,0,0,x,0,z})+2=(2-3)+(2-2)+2=1其中,f i B为第i个分支中并联部分的杆组自由度㊂再计算杆组中由另外三个运动副,包含两个转动副B㊁C和一个移动副A构成的串联部分的阶:d i m G C=d i m{0,0,γ,x,y,0}=3㊃7822㊃新的机构自由度计算公式 G OM公式的应用研究 卢文娟 张立杰 曾达幸等Copyright©博看网. All Rights Reserved.其中,G C表示杆组串联部分的位移参数㊂杆组A B C的阶:d A C1=d i m G A C1=d A C1(G B∩G C)=d A C1{0,0,γ,x,y,z}=4该杆组的所有运动副的自由度数目为∑P1i=1f i=∑P1i=1f i C+∑P1i=1f i B=3+1=4其中,f i C为杆组中串联部分运动副的自由度数目;f i B为杆组中并联部分运动副的自由度数目㊂代入式(1)计算该混联杆组自由度为F1=∑P1i=1f i-d A C1=4-4=0同理,根据机构结构的对称性,得到另外两个杆组的阶分别为d g z2=d i m(G g z2)=d g z2{0,0,γ,x,y,z}=4d g z3=d i m(G g z3)=d g z3{0,β,0,x,y,z}=4对应的杆组的自由度为F2=∑P2i=1f i-d g z2=(3+1)-4=0F3=∑P3i=1f i-d g z3=(3+1)-4=0利用交集规则得到基点的位移参数的阶为d i m(G A C1{0,0,γ,x,y,z}∩G g z2{0,0,γ,x,y,z}∩G g z3{0,β,0,x,y,z})=d3{0,0,0,x,y,z}=3将上述结果代入到式(2)得到机构自由度:F=F1+F2+F3+d B=0+0+0+3=3结果中,F=d B,基点的位移参数集合为{0, 0,0,x,y,z},即说明动平台平动,有3个移动自由度㊂3.5 多环耦合机构的自由度图4所示机构是由三个杆组构成的非对称机构,第一个杆组是由圆柱副C1和转动副R2构成;第二个杆组由H5㊁R4和C3构成,并且运动副轴线存在一些特殊的平行关系, C1//R2//C3//R4//H5,同时它们和第三个杆组中的R6轴线平行;第三个杆组由P9㊁P10㊁P11㊁P12构成的闭环杆组再与R8㊁R7㊁R6三个转动副串联构成该高阶混合杆组,其中R7//R8㊂这里我们分析该机构的一般位型,即C1㊁C3㊁R2㊁R4㊁R7㊁R86条轴线,整体看,它们不共面㊂根据机构中运动副的轴线关系,为使得到的杆组参数最少,沿着C1轴线的方向建立坐标轴,设为x方向,沿着P9导路的方向设为y方向,根据右手法则确定z轴方向,如图4所示㊂对于杆组1,连杆垂直于C1的轴线,沿着y轴方向,其杆组位移参数的阶为d g z1=d i m{α,0,0,x, y,0}=3,其自由度为图4 一种混联空间机构[5]F1=∑P1i=1f i-d1=3-3=0杆组2的位移参数的阶为d g z2=d i m{α,0,0, x,y,z}=4,即该杆组的阶为4,杆组的自由度为F2=∑P2i=1f i-d2=4-4=0重点分析杆组3的位移参数及自由度:该杆组是由P9㊁P10构成的杆组,与由P11㊁P12构成的杆组并联,再与由R8㊁R7㊁R6三个转动副串联构成该高阶混合杆组㊂先计算由P9㊁P10㊁P11㊁P12构成的闭环部分的杆组位移参数和自由度㊂由P9㊁P10构成的杆组的位移参数集合为G3C1={0,0,0,x,y,0},其阶数为d3C1=2,其自由度为F31=2-2=0㊂由P11㊁P12构成的杆组的位移参数集合为G3C2={0,0,0,x,y,z},其阶数为d3C2=3;其自由度为F32=2-3=-1㊂则由P9㊁P10㊁P11㊁P12组成的并联杆组的位移参数集合G B,根据交集规则得到:G3C1{0,0,0,x,y,0}∩G3C2{0,0,0,x,y,z}=G B{0,0,0,x,y,0}其阶为d3B=d i m{0,0,0,x,y,0}=2该闭环的自由度为F3B=F31+F32+d3B=0-1+2=1对于由R8㊁R7和R6三个转动副串联构成的杆组的位移参数集合为G C={α,β,γ,x,y,z},其参数的阶为d3C=6㊂于是可得杆组3的位移参数为G B{0,0,0,x,y,0}+G C{α,β,γ,x,y,z}=G3(α,β,γ,x,y,z}则杆组3的阶数为d g z3(G B∩G C)=d g z3{α,β,γ,x,y,z}=6该杆组的自由度为F3=∑P3i=1f i-d g z3=∑P'3i=1f i C+F3B-d g z3=3+1-6=-2㊃8822㊃中国机械工程第25卷第17期2014年9月上半月Copyright©博看网. All Rights Reserved.。
精品资料关于机构自由度计算问题的分析........................................关于机构自由度计算问题的分析【摘要】通过对几种实际机构自由度的错误计算与正确分析计算对比,总结出错误计算的问题所在,并相应提出在同类情况计算中的知识点及解题要点。
【关键词】自由度计算;齿轮副;公共约束;活动构件在实际计算机构自由度时,经常会出现按公式计算的自由度数与机构的实际自由度数不相符合的情况。
那么是什么原因造成的呢?如何正确使用计算公式呢?本文将根据几个典型问题对上述情况加以分析讨论。
一、齿轮――连杆组合机构的自由度计算分析通常的分析计算认为该机构活动构件数n=6,A、B、C为复合铰链以及构件1与构件6形成的移动副,所以PL=7;齿轮3与齿轮5构成一个高副,而齿轮5与齿条7又构成一个高副,所以pH =2;根据平F=3n-(2pL+pH)=3×6-(2×7+2)=2。
显然,计算结果与机构实际运动情况不相符。
根据机构自由度计算公式得到该机构的自由度数为问题出在齿轮副约束数的分析不准确,图一所示的机构中,齿轮 3与齿轮5的转动中心相对位置被构件4以转动副 A、B约束,两齿轮中心距始终保持不变,轮齿两侧齿廓只有一侧接触,另一侧存在间隙,故齿轮高副提供一个约束,形成一个平面高副。
而齿轮5与齿条7的中心距没有受到约束,其中齿轮5的转动中心可以随着构件6作上下摆动,两齿轮的中心可以彼此靠近,即齿轮5与齿条7的中心距是可变的,此时两轮轮齿齿廓为双侧接触,且过两接触点的公法线相交,并不彼此重合,引入两个约束,提供两个平面高副,则相当于引入一个转动副。
正确的分析计算是F=3n-(2pL+pH)=3×6-(2×7+3)=1或F=3n-(2pL+pH-p')-F'=3×6-(2×7+3-0)-0=1。
通常对于齿轮副是平面高副或者是平面低副一般的判断方法为:一对齿轮副中,两轮的转动中心被同一构件所约束中心距不变时,齿廓单侧接触,则提供一个平面高副,引入一个约束。
空间机构自由度计算公式的研究
摘要:通过对传统空间机构自由度的研究,提出新的空间机构自由度计算公式。
既可以求空间机构的自由度,又可以求平面机构的自由度。
该方法使用方便,求解简单,为空间机构自由度的计算提供了可靠的理论计算公式。
关键词:空间机构自由度封闭环数
对于空间自由度计算公式的研究,各种著作中涉及34[1~2]个,但每个公式使用起来都有一定的局限性。
有的公式在使用中,还要加入公共约束m,使用起来很不方便,甚至于还要具体问题具体分析。
为此用一个统一的自由度计算公式进行空间自由度计算显得极其必要。
1 空间自由度计算公式的建立
1943年,前苏联科学家托波洛伏尔斯基[3]根据约束理论,建立了一个统一的平面、空间机构单封闭环自由度公式
2 空间机构自由度新公式的建立
在重新建立空间机构自由度计算公式时,用多余自由度覆盖虚约束多余自由度、滚子局部多余自由度,移动副P的刚化多余自由度和新提出的结构多余自由度、级别配合多余自由度,从而给空间机构自由度的计算赋予了新的内涵,使空间机构自有的计算找到了解决问题的方法,从而避免和减少了有关自由度计算的一些不必要的就概念。
也就是说,在原平面机构自由度计算公式中,再减去多余的自由度,就得到了空间机构求自由度的新公式:
在用此公式进行空间自由度计算的时候要注意,在判断空间机构由对称性的构件和零件构成时,在不影响运动的传递情况下,去掉一个对称零件或一组对称结构,空间机构就可以顺利求解。
由于移动副P 的两构件之间的相对移动在五杆或五杆以上球面机构或等值球面机构里是不允许的,所以空间机构中移动副应被约束刚化成不能运动的构件。
3 算例
3.1 计算平面、空间混合自由度
3.1.1 用新公式计算
这说明该机构两种公式都适用。
4 结语
(1)新推导的公式计算速度快、准确率好、效率高。
(2)新公式既可以总体统一进行计算,又可以分环计算机构的自由度。
参考文献
[1] 黄真.空间机构学[M].北京:机械工业出版社,1991.
[2] 科热夫尼科夫.机构参考手册[M].北京:机械工业出版
社,1988.
[3] 白师贤.高等机构学[M].上海:上海科学技术出版社,1988.。