新型转子磁链观测器的设计与仿真
- 格式:pdf
- 大小:298.42 KB
- 文档页数:5
基于一种新的滑模磁链观测器的研究发布时间:2022-12-25T09:10:29.972Z 来源:《中国电业与能源》2022年16期作者:刘宁[导读]刘宁皖赣铁路安徽有限责任公司,安徽合肥,230000摘要:转子磁链观测器的准确性直接影响异步电机矢量控制传动系统的性能。
针对传统二阶开环转子磁链观测器(电压模型和电流模型)在不同转速段对电机参数敏感且无法闭环调整的缺点,论文研究了一种新的四阶闭环滑模磁链观测器,通过反馈定子电流的观测误差实现转子磁链幅值和角度的闭环估计,从而减小了观测器对电机参数的敏感性。
为了消除滑模控制中的颤抖问题,引入了一种新的函数代替传统的符号函数。
通过理论分析和仿真,验证了观测器在定子电阻和转子电阻变化时比传统观测器具有更好的观测性能。
关键词:感应电机磁链观测器滑模电机参数矢量控制 1 引言在工业传动领域中,笼型异步电机以其经济、耐用、可靠的等优点占据着重要地位。
由于三相异步电动机内在的耦合效应,传统的标量控制响应缓慢且容易失稳[1-2]。
随着工业要求的不断提高,高性能、高精度传动系统的重要性不断增加。
矢量控制理论通过坐标变换,使异步电机获得了与直流电机相近的性能特性,大大提高了传动系统的动态和静态性能,而在转子磁场定向的控制系统中,转子磁链估计值的准确与否将会影响整个系统的性能。
在实际的工业应用中,在线估计法利用异步电机的数学模型,推导出基于电压、电流、转速等变量的转子磁链方程,通过在线采集电压、电流、转速等的实时数值,估算当前的转子磁链幅值和角度。
为了在全速段获得准确的观测值,可以使用闭环磁链观测器,主要有基于模糊控制的磁链观测器[3]、基于滑模变结构理论的磁链观测器[4]等。
本文提出了一种基于滑模理论的磁链观测器,通过定子电流构成磁链的闭环观测系统,对电机的主要变化参数(定子电阻及转子电阻)有良好的鲁棒性,较传统的电压模型和电流模型有更好的性能。
2 滑模磁链观测器2.1 电机模型4.结论针对传统转子磁链观测器对定转子电阻变化敏感的问题,研究了一种新的滑模转子磁链观测器,通过与传统观测模型(电压模型和电流模型)的对比,验证了这种四阶闭环观测器在电机定转子变化时的良好性能。
一种新型磁链滑模观测器的IPMSM无位置传感器最大转矩
控制
ZHANG Jian
【期刊名称】《装备制造技术》
【年(卷),期】2018(000)010
【摘要】针对传统内置式永磁电机最大转矩电流比控制中存在的磁路饱和、电感误差较大的问题,在分析传统磁链模型的基础上,设计了一种新型的磁链滑模观测器.通过对内置式永磁同步电动机在d-q坐标系上的电压方程进行变换,定义新型磁链模型,并依据新磁链矢量所在轴建立新的旋转直角坐标系.为了实现内置式永磁同步电机最大转矩电流比的控制,在新建的坐标系上借助相位角分析,完成了新定义磁链的控制方程和磁链滑模观测器设计.仿真与实验结果表明:所提出的方法可以获得精度较高的定子磁链观值,对电机电感的变化具有较强的鲁棒抑制能力,可以非常近似地估计最大转矩(MTC).
【总页数】7页(P88-94)
【作者】ZHANG Jian
【作者单位】
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于一种新型磁链模型开关磁阻电机无位置传感器技术 [J], 张磊;刘闯;韩守义
2.基于有效磁链滑模观测器的IPMSM直接转矩控制 [J], 张兴华;刘伟
3.一种新型IPMSM无位置传感器矢量控制系统研究 [J], 董苏;赵烨;戴鹏
4.一种PMSM无位置传感器FOC控制的滑模观测器设计 [J], 杨宇澄;徐庆
5.基于磁链滑模观测器的 IPMSM 无传感器控制系统研究 [J], 肖甘;黄勤陆
因版权原因,仅展示原文概要,查看原文内容请购买。

感应电机模糊自适应全阶磁链观测器的仿真研究蒋林;吴俊;杨欣荣【摘要】针对感应电机的全阶磁链观测器存在低速不稳定问题,提出一种模糊自适应全阶磁链观测器.通过设计观测器的反馈增益矩阵,使得系统不稳定区域最小化,并采用模糊转速自适应律来替代PI型转速自适应律,提高转速辨识精度.将模糊自适应全阶磁链观测器应用到转子磁场定向矢量控制系统,仿真和实验结果表明该系统在各种工况下都能稳定运行,具有较好的自适应性和鲁棒性.【期刊名称】《电气传动》【年(卷),期】2016(046)008【总页数】6页(P31-35,74)【关键词】感应电机;全阶磁链观测器;稳定性分析;模糊自适应;矢量控制【作者】蒋林;吴俊;杨欣荣【作者单位】西南石油大学电气信息学院,四川成都610500;西南石油大学电气信息学院,四川成都610500;西南石油大学机电工程学院,四川成都610500【正文语种】中文【中图分类】TM346在交流调速系统中,无速度传感器的矢量控制是一个研究热点[1],其关键技术是如何准确地获取转速和磁链。
目前,常用的转速和磁链估计方法有全阶磁链观测器,而全阶磁链观测器的转速辨识系统存在低速不稳定现象[2-3]。
为此,国内外学者做了大量的研究,主要集中在观测器增益矩阵的设计[2-4,8]和转速自适应律的设计[5-6]。
文献[2-3]通过合理设计反馈增益矩阵改善了低速运行性能,但是没有考虑到参数变化对系统性能影响。
文献[4]将系统极点的多维问题转化为系统零点的一维问题来分析了系统的稳定性。
文献[5]通过修正转速自适应律来改善系统低速性能。
文献[8]基于状态误差方程来选择反馈增益系数,减小了增益系数选择的盲目性。
总之,以上稳定分析过程比较繁复,增益矩阵表达式太复杂,不利于工程实现,而且没有考虑参数变化对转速辨识的影响。
为此,本文基于观测转子磁链定向推导了转速辨识系统的传递函数,并利用劳斯判据得到了稳定运行条件,然后通过合理设计反馈增益矩阵,使得不稳定区域最小。
按照转子磁链定向旳矢量控制系统仿真1.矢量控制技术概述异步电机旳动态数学模型是一种高阶、非线性、强耦合旳多变量系统,其控制十分复杂。
矢量控制实现旳基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对机旳励磁电流和转矩电流进行控制,从而到达控制异步电动机转矩旳目旳。
将异步电动机旳异步电动定子电流矢量分解为产生磁场旳电流分量(励磁电流) 和产生转矩旳电流分量(转矩电流) 分别加以控制,并同步控制两分量间旳幅值和相位,即控制定子电流矢量,因此称这种控制方式称为矢量控制方式。
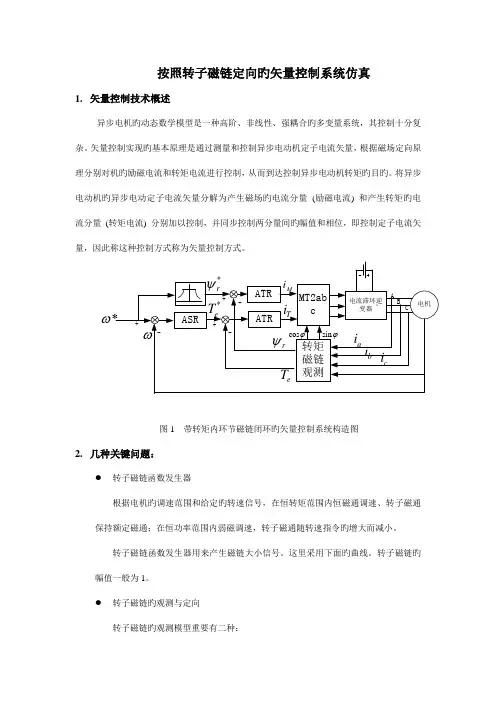
ω图1 带转矩内环节磁链闭环旳矢量控制系统构造图2.几种关键问题:●转子磁链函数发生器根据电机旳调速范围和给定旳转速信号,在恒转矩范围内恒磁通调速、转子磁通保持额定磁通;在恒功率范围内弱磁调速,转子磁通随转速指令旳增大而减小。
转子磁链函数发生器用来产生磁链大小信号。
这里采用下面旳曲线。
转子磁链旳幅值一般为1。
●转子磁链旳观测与定向转子磁链旳观测模型重要有二种:(1) 在两相静止坐标系上旳转子磁链模型电机旳定子电压和电流由传感器测得后,通过3S/2S 变换,再根据异步电机在两项静止坐标系下旳数学模型,计算转子磁链旳大小。
()r αm s αr r βr 11L i T T p ψωψ=-+ ()r βm s βr r αr 11L i T T p ψωψ=++ (2) 按磁场定向两相旋转坐标系上旳转子磁链模型三相定子电流 iA 、 iB 、iC 经3/2变换变成两相静止坐标系电流 is α 、 is β ,再经同步旋转变换并按转子磁链定向,得到M ,T 坐标系上旳电流 ism 、ist ,运用矢量控制方程式m st1s r rL i T ωωωψ-==mr smr 1L i T p ψ=+可以获得 ψr 和 ωs 信号,由ωs 与实测转速 ω 相加得到定子频率信号ω1,再经积分即为转子磁链旳相位角ϕ ,它也就是同步旋转变换旳旋转相位角。
基于电压电流混合模型的新型磁链观测器时维国; 桑尧尧【期刊名称】《《电机与控制应用》》【年(卷),期】2019(046)007【总页数】6页(P14-19)【关键词】永磁同步电机; 磁链观测器; 混合模型; 直接转矩控制【作者】时维国; 桑尧尧【作者单位】大连交通大学电气信息工程学院辽宁大连116028【正文语种】中文【中图分类】TM3510 引言永磁同步电机(PMSM)具有多变量非线性强耦合等特点。
为了应用于生活中,需要更加快速且稳定地控制电机。
直接转矩控制(DTC)是利用逆变器输出电压矢量直接控制电机定子磁链和电磁转矩的控制方法。
在DTC中,直接控制定子磁链和电磁转矩,定子磁链和电磁转矩的估计精度影响整个控制系统的性能;同时,电磁转矩的计算需要PMSM定子磁链,即PMSM电磁转矩的控制精度取决于对电机定子磁链观测的准确度[1-2]。
因此,对定子磁链的观测是直接转矩系统中非常重要的一环。
文献[3]采用低通滤波器来代替传统电压模型观测方法,导致了观测定子磁链的幅值和相位出现误差。
文献[4]提出对定子磁链进行限幅,然后加入高通滤波器来对磁链幅值进行补偿,但无法解决相位偏移问题。
文献[5]采用新型纯积分方法在线辨识磁链,方法简单,易于实现,但在低速区性能较差。
文献[6]提出采用锁相环的改进电压模型磁链观测器,基本上解决了直流偏置和积分初始值偏差问题,但在低速阶段,电机定子电动势受电阻压降影响大,测量误差较大,改进电压模型不能准确测量定子磁链。
基于精确的电机数学模型、采用降阶状态观测器取代传统电压模型观测定子磁链[7],或用于异步电机的基于扩展卡尔曼滤波的定子磁链观测器观测定子磁链[8],或采用模型参考自适应方法辨识定子磁链[9],均取得了较好的观测效果,但是上述方法中的观测器结构复杂。
文献[10]引入一阶低通滤波器与一阶高通滤波器的串联结构,来消除电压模型磁链观测器的直流偏置和积分初值设置问题,并通过补偿环节补偿滤波器引入的幅值和相位误差。
永磁同步电机永磁磁链自适应观测器设计方
法
永磁同步电机是一种新型的高效率驱动器,在工业生产和交通运
输领域发挥着越来越重要的作用。
永磁磁链自适应观测器是永磁同步
电机矢量控制系统中的重要部分,其作用是实时地测量电机转子位置、速度和加速度等关键参数,以便实现精准控制。
永磁磁链自适应观测器的设计方法主要包括以下几个方面:首先,通过对永磁同步电机的控制系统结构和工作原理进行深入研究,建立
数学模型,推导出永磁磁链动态方程和观测器动态方程,从而建立起
永磁磁链自适应观测器数学模型;其次,根据已建立的数学模型,采
用自适应滤波器算法进行观测器状态估计,实时地测量永磁磁链的变
化情况,并将观测结果反馈给系统控制器,以保证永磁同步电机的稳
定运行;最后,通过实验验证和仿真分析等手段,对所设计的永磁磁
链自适应观测器进行性能评估和优化,进一步提高永磁同步电机的工
作效率和精度。
总之,永磁磁链自适应观测器是永磁同步电机控制系统中的重要
环节,其设计方法和优化策略对于提高永磁同步电机的性能具有重要
的意义和价值。
一种新型永磁同步电机定子磁链观测器邢岩;王旭;刘岩;杨丹【摘要】定子磁链估计是直接转矩控制中不可缺少的部分,传统直接转矩控制中通过对反电动势值进行积分估计定子磁链.为了避免纯积分法的缺陷,提出定子磁链估计的改进方法,将扩展卡尔曼滤波引入到直接转矩控制中,利用扩展卡尔曼滤波估计定子磁链,研究了扩展卡尔曼滤波在定子磁链估计中的应用.仿真结果表明所提出的算法克服了传统反电动势积分法的缺陷,不仅能准确估计速度、转子位置和定子磁链,并且对电机参数具有很强的鲁棒性.【期刊名称】《东北大学学报(自然科学版)》【年(卷),期】2013(034)006【总页数】4页(P766-769)【关键词】永磁同步电机;定子磁链估计;扩展卡尔曼滤波;直接转矩控制;无速度传感器【作者】邢岩;王旭;刘岩;杨丹【作者单位】东北大学信息科学与工程学院,辽宁沈阳110819;东北大学信息科学与工程学院,辽宁沈阳110819;东北大学信息科学与工程学院,辽宁沈阳110819;东北大学信息科学与工程学院,辽宁沈阳110819【正文语种】中文【中图分类】TP273.2永磁同步电机结构简单,运行可靠,损耗少,效率高,噪声低,因而应用范围极为广泛[1].1986年感应电机直接转矩控制方法的提出[2],使直接转矩控制作为交流电机控制的有效策略得到广泛应用,并且应用到永磁同步电机中.虽然直接转矩控制因具有动态响应快、对参数依赖少、不需要电流控制器而消除了内部延迟等优点而受到越来越多的关注[3-4].但是它也存在缺点和限制:定子磁链的计算受定子电阻和反电动势积分的影响.因此许多文献中提出改进的磁链估计方法,包括对直流测量偏移进行补偿[5],以直流偏移是常数为前提,但这在实际运行中并不满足;利用可编程低通滤波器对定子磁链进行估计[6];利用PI控制器跟踪定子电阻[7]及使用永磁同步电机的电流模型[8],这两种方法需要用到转子位置信息,导致系统中增加位置传感器.这些方法都增加了计算量和系统模型的复杂度.本文将扩展卡尔曼滤波应用到直接转矩控制中,利用永磁同步电机电流模型计算定子磁链,同时将速度和转子位置作为状态分量进行估计.1 PMSM直接转矩控制直接转矩控制根据给定电磁转矩、定子磁链与实际电磁转矩、定子磁链的差值选择合适的定子电压矢量.在DTC中只用到定子电阻值,不需要电流控制器和其他电机参数,因此和矢量控制相比,直接转矩控制具有参数依赖少、转矩响应快等优点.2 传统DTC定子磁链估计直接转矩控制的基本原理是根据估算的电磁转矩Te,定子磁链幅值|ψs|和定子磁链角度θs来选择合适的定子电压矢量,从而调节转矩和磁链值.其中:Te=3p(ψsαiβ-ψsβiα)/2,p是极对数,iα,iβ分别是定子电流α轴、β轴分量,ψsα,ψsβ分别是定子磁链α轴、β轴分量.显然Te,|ψs|,θs都由ψsα和ψsβ决定,因此要想准确控制电机,定子磁链的估计至关重要.理论上讲,定子磁链矢量可以通过对反电动势值进行积分得到:ψs=(us-Rsis)dt+ψs|t=0.(1)式中:ψs|t=0是t=0时刻定子磁链的初始值;Rs,us,is分别为定子电阻、电压、电流.由于存在开环积分,us,is的直流测量偏移将导致定子磁链计算误差大,而且在电机运行过程中Rs随温度的升高而增加,也会导致定子磁链计算不准确.因此本文将扩展卡尔曼滤波应用到直接转矩控制中,利用永磁同步电机电流模型通过卡尔曼滤波状态分量计算定子磁链.3 基于EKF的定子磁链估计理论上定子磁链可由式(1)对反电动势积分得到,但存在偏移,因此本文采用SPMSM在两相静止坐标系(α,β)上的电流模型计算定子磁链:(2)式中:Ls是同步电感;ψf是永磁磁链;θr是转子位置角度.直接转矩控制不需要从静止坐标系到旋转坐标系的转换,因此本质上是一种无传感器控制策略,而由式(2)可以看出,计算定子磁链需要用到转子位置信息是一个主要缺点.为了估计转子位置信息,需要使用状态观测器[6]经过仔细研究,本文选用扩展卡尔曼滤波方法.3.1 卡尔曼滤波原理卡尔曼滤波是一种最小方差意义上的最优预测估计,采用状态空间法在时域内设计滤波器,设计简单易行.对于非线性系统可以采用扩展卡尔曼滤波,利用系统动态模型、可测量状态和系统及量测噪声对不可测状态进行估计.卡尔曼滤波算法分为两个阶段:预测阶段和修正阶段.预测阶段:由测得的输入量uk和电机模型f(xk,uk)得到电机下一个状态向量的估计值,由此计算出下一个状态输出向量的估计值并与实际测得的输出向量值zk+1进行比较.修正阶段:利用上一步所得误差、测量噪声协方差矩阵R,系统噪声协方差矩阵Q对状态值进行修正,同时计算卡尔曼增益矩阵Kk+1.3.2 扩展卡尔曼滤波选取x=[iα iβ ωr θr]T为状态变量,u=[uα uβ]T为输入变量,y=[iα iβ]T为输出变量.永磁同步电机系统状态方程和观测方程为(3)式中:则相应的扩展卡尔曼基本滤波公式为(4)(5)(6)(7)Pk+1=[I-Kk+1Hk+1]Pk+1,k.(8)4 仿真研究仿真用PMSM定子电阻Rs=2.857 Ω,直/交轴电感Ls=8.5 mH,永磁体磁链ψf=0.175 Wb.电机在轻载下启动,给定转速为150 rad/s,0.4 s时给定转速阶跃为200 rad/s.仿真结果如图1所示,从电机转速曲线可以看出,启动阶段和给定转速突变时估计转速比实际转速有较大的误差,但很快收敛于实际转速,误差趋于零.定子电阻值由于电机在运行过程中温度变化而发生变化,是时间的常数,通常定子电阻值会变化至原始值Rs0的1.5~1.7倍[9],因此图2和图3分别给出实际定子电阻为1.7Rs0,电机在轻载下启动,给定转速为150 rad/s,0.4 s时阶跃为200 rad/s,传统DTC和引入EKF后(DTC_EKF)的仿真波形.图1 转速突变时仿真波形Fig.1 Simulation wave for speed change(a)—电机转速; (b)—实际转子位置;(c)—估计转子位置; (d)—电磁转矩; (e)—定子磁链. 可以看出,在传统DTC中,当定子电阻变化时,定子磁链波形非正弦,产生较大的估计误差.因为在传统DTC中采用式(1)估计定子磁链,实际定子电阻值发生变化,而和估计式(1)中使用的值不一致时,将导致定子磁链估计误差.EKF估计器可以很好地处理定子电阻误差,因为只有f(x,u)中含有Rs,当Rs变化时,EKF估计器可以通过闭环结构修正模型误差,改善定子电阻存在误差时的系统性能,如图3所示,实际定子电阻改变,估计转速能够快速跟踪实际转速,估计得到的定子磁链、转矩值与实际值相等,且磁链和转矩脉动小.图2 Rs=1.7Rs0时传统DTC仿真波形Fig.2 Conventional DTC wave whenRs=1.7Rs0图3 Rs=1.7Rs0时EKF_DTC波形Fig.3 EKF_DTC wave when Rs=1.7Rs0(a)—电机转速; (b)—实际转子位置;(c)—估计转子位置; (d)—电磁转矩; (e)—定子磁链.5 结论本文采用扩展卡尔曼滤波和永磁电机电流模型估计定子磁链,减小转矩和磁链脉动,由于扩展卡尔曼滤波的应用,形成Rs闭环控制,解决了传统DTC中定子磁链估计受电阻影响大的问题;克服了传统DTC中纯积分法的缺陷.仿真结果表明,在速度突变的情况下,DTC_EKF可以很好地估计转速和转子位置,最终稳定在参考值,具有很好的动态和静态性能,而且对定子电阻具有很强的鲁棒性.参考文献:[1] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997:1-12. (Tang Ren-yuan.Modern permanent magnet machines theory anddesign[M].Beijing:China Machine Press,1997:1-12.)[2] Takahashi I,Noguchi T.A new quick-response and high-efficiency control strategy of an induction motor[J].IEEE Transactions on Industry Applications,1986,22(5):820-827.[3] 田淳,胡育文.永磁同步电机直接转矩控制系统理论及控制方案的研究[J].电工技术学报,2002,17(1):7-11.(Tian Chun,Hu Yu-wen.Study of the scheme and theory of the direct torque control in permanent magnet sychronous motordrives[J].Transactions of China Electrotechnical Society,2002,17(1):7-11.)[4] Zhong L,Rahman M F,Hu Y W,et al.A direct torque controller for permanent magnet synchronous motor drives[J].IEEE Transactions on Energy Conversion,1999,14(3):637-642.[5] Chapuis Y A,Roye D,Davoine J.Principles and implementation of direct torque control by stator flux orientation of an inductionmotor[C]//Applied Power Electronics Conference and Exposition.Dallas,1995:185-191.[6] Rahman M F,Haque M E,Tang L,et al.Problems associated with the direct torque control of an interior permanent-magnet synchronous motor drive and their remedies[J].IEEE Transactions on Industry Electronics,2004,51(4):799-809.[7] Haque M E,Rahman M F.Influence of stator resistance variation on direct torque controlled interior permanent magnet synchronous motor drive performance and its compensation[C]//Industry Applications Conference.Chicago,2001:2563-2569.[8] Andreescu G D,Pitic C I,Blaabjerg F,et bined flux observer with signal injection enhancement for wide speed range sensorless direct torque control of ipmsm drives[J].IEEE Transactions on Energy Conversion,2008,23(2):393-402.[9] Lee B S,Krishnan R.Adaptive stator resistance compensator for high performance direct torque controlled induction motor drive[C]//Industry Applications Conference.St.Louis,1998:423-430.。
异步电机矢量控制方案论证一,概述三相异步电机具有结构简单,牢固,维修方便,价格便宜等特点,目前在工业领域中得到广泛应用。
早期的变频调速采用变压变频(VVVF)速度开环的方式,基频以下为恒压频比控制,在低速时,提高电压以补偿定子阻抗压降。
这种调速方法的控制结构简单,成本低,适用于风机等对调速系统动态特性要求不高的场合,但是对于动态和静态性能要求高的场合,这种开环系统就无法提供足够的保障。
1971年德国西门子公司的F.Blashke等革命性地提出了“感应电机磁场定向控制原理(Fieldorientation)”,即矢量控制技术,使交流传动的转矩静动态特性取得质的改善,完全可与直流调速系统相媲美。
矢量控制的实质是利用美国A.A.Clark提出的“感应电机定子电压的坐标变换控制”原理。
经过不断的实践和改进,形成了现已得到普遍应用的矢量控制变频调速技术。
矢量控制通过引入坐标变换,把复杂的异步电机等效为简单的模型,在保证磁场准确定向的情况下,可以实现励磁电流和转矩电流的解耦,使得交流电机的转矩控制性能可以与直流电机相比拟,这无疑是交流传动控制理论上的一个质的飞跃。
转子磁场的定向控制就是在将旋转坐标系放在同步旋转磁场上,将电机的转子磁通作为旋转坐标系的直轴。
若忽略由反电动势引起的交叉耦合,检测出定子电流的直轴分量,就可以观测转子磁通幅值,但转子磁通恒定电磁转矩与定子电流的交轴分量成正比,通过控制定子电流的交轴分量就实现对电磁转矩的控制,此时称定子电流的直轴分量为励磁分量,定子电交轴分量为转矩分量。
可由电压方程的直轴分量控制转子磁通,交轴分量控制转矩从而实现磁通和转矩的解耦控制。
转子磁场定向的最大的优点是达到了完全解耦,无需增加解耦器,控制方式简单,具有良好的动态性能和控制精度。
在异步电机矢量控制中,要实现准确的解耦,必须要知道转子磁链准确的相位角。
而在直接矢量控制中,为了实现磁链的反馈控制,还要知道转子磁链准确的幅值。
感应电机二阶滑模次优算法定子磁链观测器设计潘月斗;陈泽平;郭映维【摘要】提出了基于二阶滑模次优算法的感应电机定子磁链观测方法,设计了定子磁链观测器,并应用到感应电机直接转矩控制中.本文设计的磁链观测器,通过准确的跟踪电流及其变化率,从而实现对转子磁链的准确估算,然后利用转子磁链与定子磁链的关系,估算出定子磁链.由于本文设计的定子磁链观测器是一个多输入多输出(MIMO)系统,稳定性分析非常复杂,为此将磁链估算误差的微分看作扰动处理,从而将MIMO的观测器模型分解成两个独立的单输入单输出(SISO)系统,简化了稳定性分析.将该观测器用于感应电机直接转矩控制中,达到了很好的控制效果.仿真和实验验证了该方法的有效性.【期刊名称】《控制理论与应用》【年(卷),期】2015(032)005【总页数】5页(P641-645)【关键词】感应电机;二阶滑模;次优算法;电流观测;磁链观测;直接转矩控制【作者】潘月斗;陈泽平;郭映维【作者单位】北京科技大学自动化学院,北京100083;北京科技大学钢铁流程先进控制教育部重点实验室,北京100083【正文语种】中文【中图分类】TM343感应电机被广泛应用于工农业生产、国防、科技及社会生活等各个方面,随着直接转矩控制和矢量控制技术的出现,使其逐渐进入了伺服控制领域[1].相对于矢量控制,直接转矩控制方法直接把转矩作为被控量,并由电流和定子磁链估算,无需进行磁场定向和矢量变换,更为简单和实用,具有快速的动态响应能力[2].直接转矩控制中,定子磁链观测值的精确度直接影响控制效果[3].定子磁链观测的基本方法有电压模型法和电流模型法.电压模型法结构简单,观测时仅需确定定子电阻.但是电压模型法在运算过程中需开环积分(纯积分),微小的直流偏移误差和初始值误差都将导致积分饱和[4].电流模型法可解决电压模型积分漂移和无法建立初始磁链的问题,但观测精度与转速相关,易受电动机转速变化的影响[5].为了更好的观测磁链,已提出了很多方法,如滑模变结构方法[6–7]、自适应方法[8]、卡尔曼滤波器方法[9–10]、神经网络方法[11]等.相比其他方法,滑模变结构方法对系统的不确定性因素具有较强的鲁棒性和抗干扰性,同时控制设计简单,物理上易于实现,因此得到广泛应用.但是在实际应用中,滑模变结构控制也存在一些问题,其中最主要的是抖振现象[12].近些年提出的高阶滑模控制理论[13],是对传统滑模控制理论的进一步推广.相比传统滑模,高阶滑模不仅保持了传统滑模的优点,同时抑制了系统的抖振,除去了相对阶的限制,并且提高了控制精度.二阶滑模控制是目前应用最广泛的高阶滑模控制方法,因为它的控制器结构简单且所需要的信息不多.二阶滑模控制中常见的4种算法有:twisting(螺旋)算法、sub-optimal(次优)算法、prescribed convergence law(给定收敛律)算法和Super-Twisting(超螺旋)算法.本文设计了一种基于二阶滑模次优算法的感应电机定子磁链观测器.将磁链估算误差的微分看作扰动处理,从而将MIMO的观测器模型分解成两个独立的SISO系统,简化了稳定性分析.将该观测器用于感应电机直接转矩控制中,达到了很好的控制效果.仿真及实验结果验证了该方法的有效性.设感应电机的磁路是线性的,忽略铁损的影响,在静止坐标系(α–β)下,感应电机的数学模型的状态方程为[14]δ=ηRs+Lmλθ;isα,isβ,usα,usβ,ψrα,ψrβ分别为α轴和β轴的定子电流、定子电压和转子磁链;ωr为转子电角速度;Ls,Lr,Lm分别为定子电感、转子电感和定转子间互感;Rs,Rr分别为定子电阻和转子电阻.定子磁链和转子磁链存在如下关系[15]:设计如下感应电机转子磁链观测器:其中:分别为定子电流和转子磁链的状态估计变量,vα和vβ为控制信号,分别为α轴和β轴的定子电流观测误差.定子电压和定子电流usα,usβ,isα,isβ都是可以检测到的,定子电压是原实际系统(感应电机)的输入量,定子电流可作为原实际系统的输出量;针对此观测器而言,定子电流检测量isα,isβ作为给定输入量(也作为干扰输入的一部分),定子电压检测量usα,usβ以及转子电角速度看作干扰输入的一部分;,作为观测器的反馈量.式(1)减式(2),可以得到定子电流和转子磁链观测误差方程电流观测误差方程写成如下形式:由式(5)可知,电流误差方程系统相对于控制信号v是1阶系统,因此可以采用二阶滑模控制,设计控制信号v,使得滑模变量s趋于零,并保持二阶滑动模态,即s==0.如果选取s=,采用二阶滑模控制,即可使得=0.二阶滑模次优算法(sub-optimal)形式如下:其中:s∗是最近的时间内,=0时s的值;k1,k2为控制参数,令s(t,x)=0为所定义的滑模面,控制目标是使系统的状态在有限时间内收敛到滑模流形s== 0.选取滑模面s=设计如下控制律:其中:对于式(5),将看作扰动处理,可将其分成α轴和β轴方向两个独立的SISO(单入单出)系统,如下:文献[16]给出了次优算法有限时间收敛的充分条件:其中Km,KM,C满足如下条件:对于本文设计的观测器系统,α轴方向分析如下:上式对时间求导,可得系统有限时间收敛的充分条件[16]如下:如果参数kα1,kα2满足式(9),则系统必能在有限时间内到达滑模面满足如下条件: β轴方向的稳定性分析同上.利用转子磁链观测器估算得到的转子磁链和定子电流,可估算定子磁链基于二阶滑模次优算法的感应电机定子磁链观测器系统框图如图1所示.为了检验所设计的基于二阶滑模次优算法的感应电机定子磁链观测器的有效性,进行了MATLAB仿真与实验.电机参数为:额定电压UN=220V,定子电阻Rs=94Ω,转子电阻Rr=83.9Ω,定子自感Ls= 5.387H,转子自感Lr=5.387H,互感Lm=5.082H,转动惯量J=0.105kg·m2.观测器控制参数为:kα1=kβ1=10,kα2=kβ2=5.电机施加220V,15Hz的三相交流电,在开环下空载运转,4s时,施加3N·m负载转矩.仿真时间7s,仿真结果如图2–5所示.从图3和图4可以看出,观测电流误差及其微分(由于实际对磁链观测误差有影响的是,所以图4实际是δ的值),在一定时间内渐近趋于0,从而说明了给二阶滑模次优算法控制的有效性.从图5可以看出,观测磁链在一定时间内达到稳定.为了验证基于二阶滑模次优算法的感应电机定子磁链观测器的有效性,将其应用到感应电机直接转矩控制中.电机参数与开环时一样,定子磁链给定值ψ=1Wb,给定转速600r/min.转速调节器采用PID控制,其中比例系数KP=10,积分系数KI= 0.001,微分系数KD=0.5.仿真时间20s,仿真结果如图6所示.为了验证二阶滑模次优算法定子磁链观测器的实际可行性,利用“电力电子与电气传动综合实验台”进行实验.实验台组成包括:功率挂箱、主控挂箱、加载控制箱、电动机、上位机,如图7所示.实验电机为鼠笼式三相异步电动机,参数与仿真时所用电机参数相同.转速给定值600r/min,实验结果如图8所示.从仿真和实验结果可以看出,二阶滑模次算法定子磁链观测器能够很好的观测定子磁链,电机转速也最终稳定在了给定值600r/min,从而证明了本文所提出的基于二阶滑模次算法的感应电机定子磁链观测器的实际可行性.本文提出的二阶滑模次优算法定子磁链观测器,首次将二阶滑模次优算法应用到感应电机定子磁链观测器设计中,并将此观测器应用到直接转矩控制中.从仿真和实验结果可以看出,该观测器能够准确的估算定子磁链,将其用于感应电机直接转矩控制中,也达到了很好的控制效果.仿真实验验证了该方法的有效性.潘月斗(1966–),男,博士,副教授,目前研究方向为交流电动机智能控制理论研究及高速高精交流电动机驱动系统的计算机数字控制系统设计,E-mail:****************;陈泽平(1989–),男,硕士研究生,目前研究方向为电气传动及自动化,E-mail:**********************;郭映维(1990–),男,硕士研究生,目前研究方向为异步电机控制理论及数字化设计,E-mail:*****************.【相关文献】[1]PELLEGRINO G,GUGLIELMI P,ARMANDO E,et al.Selfcommissioning algorithm for inverter nonlinearity compensation in sensorless induction motor drives[J].IEEE Transactions on Industry Applications,2010,46(4):1416–1424.[2]张细政,王耀南,袁小芳,等.基于滑模与自适应观测器的感应电机非线性控制新策略[J].控制理论与应用,2010,27(6):753–760.(ZHANG Xizheng,WANG Yaonan,YUAN Xiaofang,et al.New nonlinear controller forinduction motor based on sliding-mode control and adaptive observer[J].Control Theory&Applications,2010, 27(6):753–760.)[3]张猛,肖曦,李永东.基于扩展卡尔曼滤波器的永磁同步电机转速和磁链观测器[J].中国电机工程学报,2007,27(36):36–40.(ZHANG Meng,XIAO Xi,LI Yongdong.Speed and flux linkage observer for permanent magnet synchronous motor based on EKF[J]. Proceedings of the CSEE,2007,27(36):36–40.)[4]李红,罗裕,韩邦成,等.带通滤波器法电压积分型定子磁链观测器[J].电机与控制学报,2013,17(9):8–16.(LI Hong,LUO Yu,HAN Bangcheng,et al.Voltage integral model for stator flux estimator based on band-pass filter[J].Electric Machines and Control,2013,17(9):8–16.)[5]SPICHARTZ M,STEIMEL A,Stator-flux-oriented control with high torque dynamics in the whole speed range for electric vehicles[C] //Emobility-Electrical Power Train.New York:IEEE,2010:1–6.[6]LI J C,XU L Y,ZHANG Z.An adaptive sliding-mode observer for induction motor sensorless speed control[J].IEEE Transactions on Industry Applications,2005,41(4):1039–1046.[7]REHMAN H.Elimination of the stator resistance sensitivity and voltagesensorrequirementproblemsforDFOcontrolofaninductionmachine[J].IEEE Transactions on Industrial Electronic,2005,52(1): 263–269.[8]刘艳红,霍海娟,楚冰,等.感应电机转矩跟踪无源控制及自适应观测器设计[J].控制理论与应用,2013,30(8):1021–1026.(LIU Yanhong,HUO Haijuan,CHU Bing,et al.Passivity-based torque tracking control and adaptive observer design of induction motors[J].ControlTheory&Applications,2013,30(8):1021–1026.)[9]BARUT M,BOGOSYAN S,GOKASAN M.Speed-sensorless estimation for induction motors using extended Kalman filters[J].IEEE Transactions on IndustrialElectronics,2007,54(1):272–280.[10]HAQUE M E,ZHONG L,RAHMAN M F.A sensorless initial rotor position estimation scheme for a direct torque controlled interior permanent magnet synchronous motor drive[J].IEEE Transactions on Power Electronics,2003,18(6):1376–1383.[11]SIMOES M G,BOSE B K.Neural network based estimation of feedback signals for a vector controlled induction motor drive[J].IEEE Transactions on IndustryApplication,1995,31(3):620–629.[12]YOUNGK D,UTKIN V I,OZGUNER U.A control engineer’s guide to sliding mode control[J].IEEE Transactions on Control Systems Technology,1999,7(3):328–342.[13]FRIDMAN L,LEVANT A.Higher order sliding modes as a natural phenomenon in control theory[J].Robust Control via Variable Structure and LyapunovTechniques.Heidelberg,Berlin:Springer,1996: 107–133.[14]LI J,XU L,ZHANG Z.An adaptive sliding-mode observer for induction motor sensorless speed control[J].IEEE Transactions on Industry Applications,2005,41(4):1039–1046. [15]MITRONIKASED,SAFACASAN.Animprovedsensorlessvectorcontrol method for an induction motor drive[J].IEEE Transactions on Industrial Electronics,2005,52(6):1660–1668.[16]LEVANT A.Principles of 2-sliding mode design[J].Automatica, 2007,43(4):576–586.。
设计与研究作者简介:徐波(1993- ),男,硕士研究生,研究方向为永磁电机及其控制; 杨烨(1994- ),女,硕士研究生,研究方向为风力发电系统。
用于无刷直流电机无位置控制的转子磁链观测器设计徐波,杨烨(南京理工大学 自动化学院,江苏 南京 210094)摘 要:针对无刷直流电机无位置控制中滤波器会引起磁链幅值和位置估计误差等问题,设计了一种能够抑制直流偏移获取准确位置的改进型转子磁链观测器。
通过将二阶高通滤波器和纯积分器进行串联,可以有效减小位置估计误差。
在基于控制器STM320F28335的实验平台上实验,结果表明改进型转子磁链观测器能够准确估计转子位置,有效改善电流波形,实现电机的平稳高速运行。
关键词:无刷直流电机;无位置控制;转子磁链观测器;位置估计中图分类号:TM351 文献标识码:A 文章编号:1007-3175(2018)11-0005-05Abstract: In order to solve the problem of the amplitude and position estimation error of the magnetic chain, caused by the filter in the sensorless control of the brushless direct current (DC) motor, this paper designed a kind of improved rotor flux observer, which can restrain the accurate location of the DC offset. By combining two order high-pass filter and pure integrator, the position estimation error could be ef-fectively reduced. The experiment on the experimental platform based on the controller STM320F28335 shows that the improved rotor flux observer can accurately estimate the rotor position, improve the current waveform effectively, and realize the smooth and high speed opera-tion of the motor.Key words: brushless direct current motor; sensorless control; rotor flux observer; location estimationXU Bo, YANG Ye(School of Automation, Nanjing University of Science and Technology, Nanjing 2 0094, China )Rotor Flux Observer Design for Sensorless Control ofBrushless Direct Current Motor永磁无刷直流电机具有结构简单、功率密度高、效率高、转动惯量小等优点[1],正逐渐成为工业控制、交通运输以及办公自动化等领域的主流电机。
基于改进磁链观测器的PMSM转子位置估计方法周硕1,2(1.辽宁轨道交通职业学院机电工程系,辽宁 沈阳 110023;2.东北大学 信息科学与工程学院,辽宁 沈阳 110004) 摘要:针对传统永磁同步电机(PMSM)直接转矩控制系统低速运行磁链观测不精确、转子位置估计存在相位延迟等问题,设计了适用于全速度域的磁链观测器,并利用锁相环(PLL)技术改进了传统转子位置估计方法。
提出了基于PI控制器的多模型组合磁链观测器,实现了电阻在线估计和直流偏移补偿;利用锁相环技术设计了基于复变陷波器的转子位置估计结构;最后,通过仿真和实验证明了提出的新型PLL结构能够有效地滤除观测反电势中的谐波成分,提高了转子位置估计精度。
关键词:永磁同步电机;多模型组合磁链观测器;锁相环;复变陷波器中图分类号:TP273 文献标识码:A 犇犗犐:10.19457/j.1001 2095.dqcd19631犚狅狋狅狉犘狅狊犻狋犻狅狀犈狊狋犻犿犪狋犻狅狀犕犲狋犺狅犱犳狅狉犘犕犛犕犅犪狊犲犱狅狀犐犿狆狉狅狏犲犱犉犾狌狓犔犻狀犽犪犵犲犗犫狊犲狉狏犲狉ZHOUShuo1,2(1.犇犲狆犪狉狋犿犲狀狋狅犳犕犲犮犺犪狀犻犮犪犾犪狀犱犈犾犲犮狋狉狅狀犻犮犈狀犵犻狀犲犲狉犻狀犵,犌狌犻犱犪狅犼犻犪狅狋狅狀犵犘狅犾狔狋犲犮犺狀犻犮犐狀狊狋犻狋狌狋犲,犛犺犲狀狔犪狀犵110023,犔犻犪狅狀犻狀犵,犆犺犻狀犪;2.犛犮犺狅狅犾狅犳犐狀犳狅狉犿犪狋犻狅狀犛犮犻犲狀犮犲牔犈狀犵犻狀犲犲狉犻狀犵,犖狅狉狋犺犲犪狊狋犲狉狀犝狀犻狏犲狉狊犻狋狔,犛犺犲狀狔犪狀犵110004,犔犻犪狅狀犻狀犵,犆犺犻狀犪)犃犫狊狋狉犪犮狋:Theinaccuracyestimationofthefluxlinkageandthephasedelayoftherotorpositionestima tionaffectthedynamicperformanceinthetraditionalpermanentmagnetsynchronousmotor(PMSM)directtorquecontrol(DTC)system.Toimprovetherotorpositionestimation,anewrotorpositionmethodbasedonthephase lockedloop(PLL)wasproposed.Firstly,amulti modelcombinedfluxlinkageobserverbasedonthePIcontrollerwasdesigned.Secondly,anewrotorpositionestimationmethodbasedonthecomplexnotchfilterwasdesigned.Finally,thesimulationsandtheexperimentswereimplementedtocomparetheperform ancesoftheproposedrotorpositionestimationmethodandthetraditionalmethod.TheresultsshowthattheproposedPLLcaneliminateharmonicsintheestimatedbackEMFandimprovetheaccuracyoftheestimatedrotorposition.犓犲狔狑狅狉犱狊:permanentmagnetsynchronousmotor(PMSM);multi modelcombinedfluxobserver;phase lockedloop(PLL);complexnotchfilter 永磁同步电机(PMSM)具有高功率密度、高可靠性等优势,广泛应用于航空航天、电动汽车、医疗器械、机器人伺服系统等领域[1-4]。