一种感应电机参数自适应转子磁链观测器的设计
- 格式:pdf
- 大小:332.89 KB
- 文档页数:5
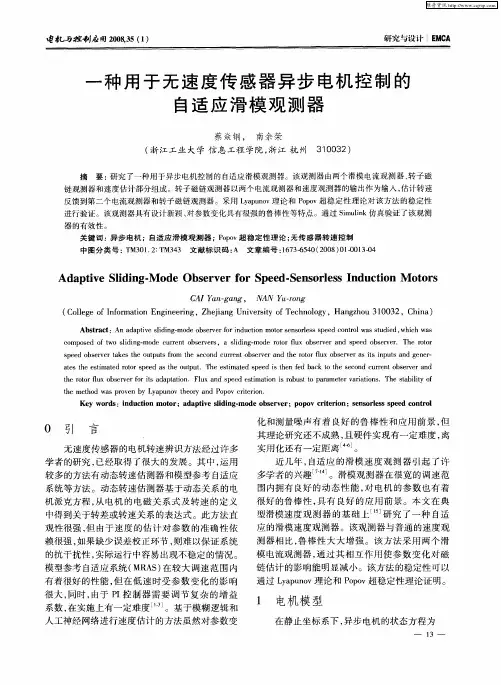
2006年1月电工技术学报Vol.21 No.1 第21卷第1期TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY Jan. 2006基于模型参考方法的感应电机磁链的自适应观测及参数辨识金海黄进(浙江大学电气工程学院杭州 310027)摘要提出一种基于模型参考方法的自适应定子磁链观测器,这种观测器不必预先知道电机的任何参数值,并且因运行时电机参数发生改变而发生的观测偏差也是收敛的。
当电机的激励电压满足所谓“充分激励”的条件时,还可以同时作为参数辨识器;即使输入电压不满足充分激励的条件,但如果部分参数已知,仍然可以辨识其余的参数。
仿真和实验结果验证了该方法的正确性。
关键词:感应电动机模型参考自适应系统状态观测器充分激励参数辨识中图分类号:TM346Adaptive Flux Estimation and Parameters Identification of InductionMotors Based on Model Reference ApproachJin Hai Huang Jin(Zhejiang University Hangzhou 310027 China)Abstract Based on model reference approach, an adaptive stator flux estimator for an induction motor is put forward. Estimating error caused by parameters mismatch is convergent while machine is operating. The estimator can be used for parameter identifier on condition that input voltage is a persistent excitation. Given one of the parameters or more, the rest can still be identified by this estimator even if input voltage is not persistent. The validity and practicability is verified by simulation and experiment results.Keywords:Induction motor,MRAS,states observer,persistency of excitation,parameter identifi- cation1引言在现代异步电机变频调速系统中,准确观测定子或者转子磁链是系统取得高性能的前提条件,也是矢量控制、直接转矩控制等高性能调速系统的关键技术[1]。

感应电机模糊自适应全阶磁链观测器的仿真研究蒋林;吴俊;杨欣荣【摘要】针对感应电机的全阶磁链观测器存在低速不稳定问题,提出一种模糊自适应全阶磁链观测器.通过设计观测器的反馈增益矩阵,使得系统不稳定区域最小化,并采用模糊转速自适应律来替代PI型转速自适应律,提高转速辨识精度.将模糊自适应全阶磁链观测器应用到转子磁场定向矢量控制系统,仿真和实验结果表明该系统在各种工况下都能稳定运行,具有较好的自适应性和鲁棒性.【期刊名称】《电气传动》【年(卷),期】2016(046)008【总页数】6页(P31-35,74)【关键词】感应电机;全阶磁链观测器;稳定性分析;模糊自适应;矢量控制【作者】蒋林;吴俊;杨欣荣【作者单位】西南石油大学电气信息学院,四川成都610500;西南石油大学电气信息学院,四川成都610500;西南石油大学机电工程学院,四川成都610500【正文语种】中文【中图分类】TM346在交流调速系统中,无速度传感器的矢量控制是一个研究热点[1],其关键技术是如何准确地获取转速和磁链。
目前,常用的转速和磁链估计方法有全阶磁链观测器,而全阶磁链观测器的转速辨识系统存在低速不稳定现象[2-3]。
为此,国内外学者做了大量的研究,主要集中在观测器增益矩阵的设计[2-4,8]和转速自适应律的设计[5-6]。
文献[2-3]通过合理设计反馈增益矩阵改善了低速运行性能,但是没有考虑到参数变化对系统性能影响。
文献[4]将系统极点的多维问题转化为系统零点的一维问题来分析了系统的稳定性。
文献[5]通过修正转速自适应律来改善系统低速性能。
文献[8]基于状态误差方程来选择反馈增益系数,减小了增益系数选择的盲目性。
总之,以上稳定分析过程比较繁复,增益矩阵表达式太复杂,不利于工程实现,而且没有考虑参数变化对转速辨识的影响。
为此,本文基于观测转子磁链定向推导了转速辨识系统的传递函数,并利用劳斯判据得到了稳定运行条件,然后通过合理设计反馈增益矩阵,使得不稳定区域最小。
基于二阶滑模与定子电阻自适应的转子磁链观测器及其无速度传感器应用黄进;赵力航;刘赫【摘要】针对感应电机高性能矢量控制需求,设计一种基于Super-Twisting二阶滑模理论的转子磁链观测器,并提出以其观测结果作为参考模型的无速度传感器控制方案.该观测器属于非线性滑模观测器,充分利用了辅助滑模面,因而对电机转子电阻变化以及外部扰动具有良好的鲁棒性,且反应速度优于传统电压型转子磁链观测器.而Super-Twisting理论无法处理的定子侧参数变化与扰动问题,则由并行定子电阻辨识机构进行修正.实验证明,转子磁链观测结果的相位和幅值较为准确.整套控制方案的有效性也经由仿真和实验得到验证.【期刊名称】《电工技术学报》【年(卷),期】2013(028)011【总页数】8页(P54-61)【关键词】感应电机;模型参考自适应;无传感器控制;二阶滑模;Super-Twisting 【作者】黄进;赵力航;刘赫【作者单位】浙江大学电气工程学院杭州 310027;浙江大学电气工程学院杭州310027;浙江大学电气工程学院杭州 310027【正文语种】中文【中图分类】TM3511 引言自20 世纪70 年代发展至今,三相异步电机矢量控制技术已趋成熟,能够满足大部分工业需求。
而精确的转子磁场定向和准确的转速观测,是保证矢量控制效果的两个最重要的因素。
为了能通过电机外部量“观测”电机内部的磁通,大部分控制方案采用的是基于数学模型的间接磁场定向矢量控制。
该方法的控制性能受数学模型准确性和电机参数稳定性的影响,其中定子电阻与转子时间常数影响最大。
另一方面,转速是非常重要的反馈量。
传统的机械式速度传感器会带来额外的成本和安装维护方面的问题,因此无速度传感器技术一直是电机控制领域的重要研究方向。
转子磁链和转速的观测可以在只测得定子侧电信号的前提下实现[1]。
将定子电流、转子磁链作为状态变量写出异步电机数学模型,在此基础上即可构建转子磁链观测器,并实现转速辨识。
一种基于转速和定子电阻自适应的感应电机全阶磁链观测器王高林;陈伟;于泳;徐殿国
【期刊名称】《微电机》
【年(卷),期】2009(42)3
【摘要】提出了一种改进的全阶状态观测器对转速和定子电阻同时观测方案.采用小信号线性化方法来分析稳定条件,将两相静止坐标系中的观测器输出误差系统变换到转子磁场旋转坐标系中,通过推导出单输入、单输出误差系统来得到满足观测器稳定性的误差反馈矩阵条件.采用了一种改进的定子电阻自适应率以提高观测器的鲁棒性.通过对11 kW感应电机无速度传感器转子磁场定向矢量控制实验,验证了方案的有效性.
【总页数】4页(P5-8)
【作者】王高林;陈伟;于泳;徐殿国
【作者单位】哈尔滨工业大学,哈尔滨,150001;哈尔滨工业大学,哈尔滨,150001;哈尔滨工业大学,哈尔滨,150001;哈尔滨工业大学,哈尔滨,150001
【正文语种】中文
【中图分类】TM346
【相关文献】
1.一种新型的无速度传感器感应电机转速与定子电阻辨识方案 [J], 刘刚;任一峰;林都;赵敏
2.基于二阶滑模与定子电阻自适应的转子磁链观测器及其无速度传感器应用 [J],
黄进;赵力航;刘赫
3.基于CESO磁链观测器的模型参考自适应感应电机转速辨识 [J], 韦文祥;刘国荣
4.感应电机模糊自适应全阶磁链观测器的仿真研究 [J], 蒋林;吴俊;杨欣荣
5.感应电机转速自适应全阶磁链观测器的离散化 [J], 宋文祥;周杰;尹赟
因版权原因,仅展示原文概要,查看原文内容请购买。
永磁同步电机永磁磁链自适应观测器设计方
法
永磁同步电机是一种新型的高效率驱动器,在工业生产和交通运
输领域发挥着越来越重要的作用。
永磁磁链自适应观测器是永磁同步
电机矢量控制系统中的重要部分,其作用是实时地测量电机转子位置、速度和加速度等关键参数,以便实现精准控制。
永磁磁链自适应观测器的设计方法主要包括以下几个方面:首先,通过对永磁同步电机的控制系统结构和工作原理进行深入研究,建立
数学模型,推导出永磁磁链动态方程和观测器动态方程,从而建立起
永磁磁链自适应观测器数学模型;其次,根据已建立的数学模型,采
用自适应滤波器算法进行观测器状态估计,实时地测量永磁磁链的变
化情况,并将观测结果反馈给系统控制器,以保证永磁同步电机的稳
定运行;最后,通过实验验证和仿真分析等手段,对所设计的永磁磁
链自适应观测器进行性能评估和优化,进一步提高永磁同步电机的工
作效率和精度。
总之,永磁磁链自适应观测器是永磁同步电机控制系统中的重要
环节,其设计方法和优化策略对于提高永磁同步电机的性能具有重要
的意义和价值。
基于二阶滑模观测器的感应电机转子磁链观测徐静;杨淑英;郭磊磊;张兴【摘要】实现矢量控制的基础是准确获得转速和转子磁链信息,本文提出了一种基于二阶滑模观测器的转子磁链观测方法.将构造的滑模观测器作为模型参考自适应系统(MRAS)的参考模型,将磁链的电流模型改造为该中间变量的可调模型,且其可调量为转速变量,进而构造出MRAS,实现对转速的观测.在此基础上,完成转子磁链的计算,并得到转子磁链角度,实现基于直接磁场定向的感应电机矢量控制.中间量的构造有效避免了传统MRAS中的纯积分问题,便于算法的实施;二阶滑模观测器有效地削弱了一阶滑模观测器存在的抖振扰动,并且参数具有较强的鲁棒性.仿真结果表明该转子磁链观测器具有较高的观测精度,且对外部扰动和转子电阻变化具有较强的鲁棒性,提高了系统的动稳态性能.【期刊名称】《电工电能新技术》【年(卷),期】2016(035)012【总页数】6页(P32-37)【关键词】感应电机;二阶滑模;MRAS;磁链观测;无传感器控制【作者】徐静;杨淑英;郭磊磊;张兴【作者单位】合肥工业大学电气与自动化工程学院,安徽合肥230009;合肥工业大学电气与自动化工程学院,安徽合肥230009;合肥工业大学电气与自动化工程学院,安徽合肥230009;合肥工业大学电气与自动化工程学院,安徽合肥230009【正文语种】中文【中图分类】TM343感应电机的低成本和免维护等特点使其在工业生产中得到了广泛应用[1]。
矢量控制技术的发展,使其调速性能得到了显著改善。
转速及矢量定向是直接影响调速性能的两个重要因素[2]。
转速信息虽然可通过机械速度传感器获得,但会增加控制系统的成本和机械安装的复杂性,降低系统的可靠性[3]。
而无速度传感器技术可有效避免上述弊端,因此其成为近年来国内外学者研究的热点。
转子磁链信息可以通过直接测量获得,但直接测量法较难在实际系统中实现[4],因此常采用间接观测的方法来获取转子磁链[5]。
一种改进的模型参考自适应定子磁链观测器暴国辉;邓德卫;梅柏杉;虞江;傅闯【摘要】分析了几种常用磁链观测方法,提出一种改进的MRAS(模型参考自适应)磁链转速观测器,同时辨识了定子磁链和转子转速.在异步电机按定子磁场定向控制系统中,采用定子电阻压降补偿和电流转矩分量的闭环控制,实现了定子磁链的控制,系统具有较好的鲁棒性.【期刊名称】《电气开关》【年(卷),期】2014(052)002【总页数】5页(P8-11,19)【关键词】MRAS;矢量控制;磁链观测【作者】暴国辉;邓德卫;梅柏杉;虞江;傅闯【作者单位】湘潭大学,湖南湘潭411100;湘潭大学,湖南湘潭411100;上海电力学院,上海200090;湘潭大学,湖南湘潭411100;湘潭大学,湖南湘潭411100【正文语种】中文【中图分类】TM614近年来,高性能无速度传感器[1]矢量控制的实现吸引了各国科研工作者的广泛关注,并已成为了驱动控制研究的热点之一[2]。
无速度传感器矢量控制仍然沿用磁场定向控制技术,只是转速获得方法不同。
因此,无速度传感器磁场定向矢量控制技术的关键是如何准确获取磁场定向角以及电机的转速信息[3,4]。
基于上述情况,本文提出一种改进的MRAS(模型参考自适应)[5]磁链转速观测器,同时辨识了定子磁链和转子转速。
构成了定子电阻压降补偿和电流转矩分量的闭环控制的矢量控制系统,实现了定子磁链的控制。
仿真表明该系统在低速范围具有较强的鲁棒性。
2.1 U-I模型根据异步电机定子电压方程可以得到:ψs=∫(us-Rsis)dt=∫Esdt其中,us为定子电压矢量;is为定子电流矢量;Es为定子反电动势;ψs为定子磁链矢量。
图1为异步在电机20Hz频率下运行的实际磁链和U-I模型辨识磁链β轴的仿真波形,其中灰色为实际磁链,黑色为辨识的磁链。
从图中可以看出,由于纯积分和定子电阻的影响,使得电压模型观测的磁链增大,并且产生了直流偏置,辨识出现误差。
中图分类号:T M346 文献标志码:A 文章编号:100126848(2009)0320005204一种基于转速和定子电阻自适应的感应电机全阶磁链观测器王高林,陈 伟,于 泳,徐殿国(哈尔滨工业大学,哈尔滨 150001)摘 要:提出了一种改进的全阶状态观测器对转速和定子电阻同时观测方案。
采用小信号线性化方法来分析稳定条件,将两相静止坐标系中的观测器输出误差系统变换到转子磁场旋转坐标系中,通过推导出单输入、单输出误差系统来得到满足观测器稳定性的误差反馈矩阵条件。
采用了一种改进的定子电阻自适应率以提高观测器的鲁棒性。
通过对11k W 感应电机无速度传感器转子磁场定向矢量控制实验,验证了方案的有效性。
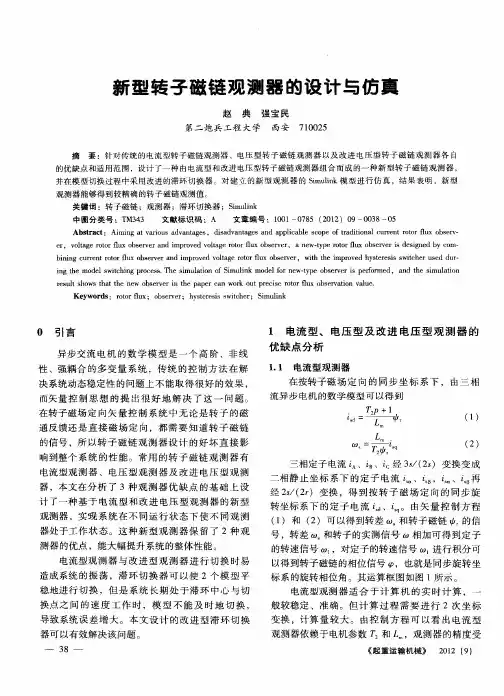
关键词:感应电动机;转速估计;定子电阻;自适应;全阶观测器;实验Full 2order Flux O bserver Ba sed on Speed and St a torResist ance Adapt a ti on for I nducti on M otor WANG Gao 2lin,CHE N W ei,Y U Yong,XU D ian 2guo (Harbin I nstitute of Technol ogy,Harbin 150001,China )Abstract:An i m p r oved full 2order observer was p r oposed t o esti m ate s peed and stat or resistance synchr o 2nously .Stability of the s peed esti m at or is analyzed adop ting s mall 2signal linearized model .The observererr or syste m was translated int o synchr onous reference fra me .Then the err or feedback gain matrix couldbe designed thr ough the single 2input and single 2out put err or syste m t o satisfy the stability conditi ons .An i m p r oved adap tive mechanis m was p resented t o i m p r oved r obustness of the observer .The feasibility of thep r oposed sche me is verified by the ex peri m ental results of s peed sens orless field 2oriented vect or contr olled11k W inducti on mot or .Key W ords:I nducti on mot or ;S peed esti m ati on;Stat or resistance;Adaptati on;Full 2order observer ;Ex 2peri m ent收稿日期:2008203203修回日期:20092032190 引 言近年来,基于模型参考自适应系统的闭环磁链观测方法受到了广泛关注。
感应电动机磁链观测与参数在线辨识方法研究周江华;万山明;华志超【摘要】针对感应电动机在矢量控制过程中存在的转子磁链定向不准确的问题,解释了磁链观测误差的原因,重点研究了电机参数的在线辨识方法.提出了基于模型参考自适应系统的感应电动机磁链观测与参数在线辨识方法.基于波波夫超稳定性定理,设计了转子时间常数与励磁互感的双参数自适应律.该方法以电压模型磁链观测器作为参考模型,在线辨识出电流模型磁链观测器所需的参数,使磁链观测结果具有收敛性和鲁棒性,从而避免了电机参数测量不准确与容易变化对磁链定向造成的不良影响.仿真结果表明该方法具有实时性与可行性.【期刊名称】《电机与控制应用》【年(卷),期】2018(045)011【总页数】6页(P72-77)【关键词】感应电机;参数在线辨识;模型参考自适应系统;磁链观测器;矢量控制【作者】周江华;万山明;华志超【作者单位】华中科技大学强电磁工程与新技术国家重点实验室,湖北武汉430074;华中科技大学强电磁工程与新技术国家重点实验室,湖北武汉430074;华中科技大学强电磁工程与新技术国家重点实验室,湖北武汉430074【正文语种】中文【中图分类】TM3460 引言矢量控制是现代感应电机变频调速的重要方法,其控制性能的优劣关键取决于磁场定向的准确性[1-2]。
直接磁场定向的实质是实时控制转子磁链的幅值大小和空间相位,从而实现定子电流励磁分量与转矩分量的解耦。
采用直接检测转子磁链的方法需要额外增加测量线圈或者传感器,因而在实际工程中,一般采用按数学模型的转子磁链计算方法。
以所需检测信号的不同,转子磁链计算的基本方法可分为电压模型法与电流模型法两类[3]。
电压模型法通过采集电机的电压与电流信号,对反电动势进行积分估计转子磁链,受电机参数影响较小,但纯积分环节的初始值与误差累积将直接影响计算结果,特别在低速区间,考虑到定子电阻压降作用,检测结果精度较低。
电流模型法通过电机的电流信号与转速信号估计转子磁链,观测值渐进收敛,理论上比较准确,但容易受到电机参数变化的影响,使系统的控制性能降低。
感应电机 Super-twisting 算法定子磁链观测器设计潘月斗;陈涛;陈泽平【摘要】In order to improve the observation accuracy of stator flux of induction motor,a stator flux esti-mation method based on Super-twisting algorithm was proposed.A stator flux observer was designed and applied for direct torque control of induction motor.According to the robustness of sliding mode variable structure control,the disturbance of the multiple input multiple output stator flux observer system was re-strained.By using the advantages of Super-twisting algorithm which require less information to design a simple control law,and thus more suitable for practical engineering applications.The speed and amount of coupling were regarded as disturbances in the analysis of the stability of observer,and the sufficient condi-tions of the system uniformly asymptotically stable was pared with the u-i model observer, the proposed observer based on Super-twisting algorithm is more accurate and has better robustness to the change of stator resistance.Simulation and experiment results validate the proposed method.%为了提高感应电机定子磁链的观测精确度,提出了一种基于Super-twisting算法的磁链观测方法,设计了定子磁链观测器,并应用到感应电机直接转矩控制中。
感应电机直接转矩控制系统的新型滑模定子磁链观测器张兴华;石万;李磊【摘要】为提高定子磁链的估计精度,改善直接转矩控制驱动系统的性能,提出了一种新型定子磁链滑模观测器.采用Lyapunov稳定性理论证明了观测器是稳定的.该观测器的实现无需电压信息,对电机参数变化具有强鲁棒性,即使在电机低速运行区依然能够提供精确的磁链估计值.仿真结果验证了基于该观测器的感应电机直接转矩控制系统具有优良性能.【期刊名称】《电气传动》【年(卷),期】2014(044)010【总页数】4页(P3-6)【关键词】感应电机;滑模观测器;定子磁链估计;直接转矩控制【作者】张兴华;石万;李磊【作者单位】南京工业大学自动化与电气工程学院,江苏南京211816;南京工业大学自动化与电气工程学院,江苏南京211816;泰州市华源电机有限公司,江苏泰州225500【正文语种】中文【中图分类】TM921;TP13目前,常用的定子磁链观测器是开环电流模型[1]和电压模型[2]。
其中电流模型易受转子电阻变化影响,在高速区运行时性能不佳,并且要求高精度的转速检测。
电压模型在电机高速运行区有很好的估计精度,但在低速运行时,受定子电阻变化的影响,性能明显下降。
为获得准确的定子磁链信息,提高直接转矩控制系统的性能。
提出了一些新的方法来估计定子磁链。
如模型参考自适应观测器[3];自适应Luenberger观测器[4-6];扩展的Kalman滤波器[7]和基于凸极效应的高频信号注入方法[8]等。
为进一步提高磁链估计精度,近年来人们提出了一类滑模磁链观测器[9-11],由于其对电机参数变化和负载扰动不敏感和实现结构简单等优点,引起了广泛关注。
本文提出了一种新型定子磁链滑模观测器。
该观测器的主要特点是对定子电阻变化具有强鲁棒性,且其实现不需要定子电压信息(系统中可以不安装电压传感器,从而简化硬件结构,节省实现成本)。
通过适当选择滑模增益,可使定子电流估计值渐近收敛。
一种感应电机参数自适应转子磁链观测器的设计
余夫良;邓志奇;陈阳生
【期刊名称】《机电工程》
【年(卷),期】2011(028)007
【摘要】为了解决"感应电机运行过程巾由电机参数变化引起的转子磁场定向不准确"的问题,根据龙贝格观测器原理提出了一种新颖的参数白适应转子磁链观测器.首先论述了观测器的设计原理,针对磁链误差无法获得这一问题提出了一种有效的解决方案,引入了新变量,然后根据Lyapunov稳定性原理设计出参数自适应律.最后分别在Matlab和DSP2812平台上对该算法的参数收敛性以及定子电阻误差对观测器的影响进行了验证.仿真和实验结果表明,该方法不但可以对转子磁链加以观测,还可以同时在线调整并辨识转子电阻以及转子时间常数,对定子电阻具有很强的鲁棒性.
【总页数】5页(P876-880)
【作者】余夫良;邓志奇;陈阳生
【作者单位】浙江大学电气工程学院,浙江,杭州,310027;浙江大学电气工程学院,浙江,杭州,310027;浙江大学电气工程学院,浙江,杭州,310027
【正文语种】中文
【中图分类】TM343
【相关文献】
1.基于模型参考自适应理论转子磁链观测器的设计 [J], 成行洁;张春龙
2.一种基于转速和定子电阻自适应的感应电机全阶磁链观测器 [J], 王高林;陈伟;于泳;徐殿国
3.一种混合模型转子磁链观测器的设计 [J], 潘越;
4.不依赖于定转子参数的感应电动机转子磁链的自适应观测器设计 [J], 夏超英;晋兆
5.五相感应电机的转子磁链观测器比较研究 [J], 贾慧利;欧天翔
因版权原因,仅展示原文概要,查看原文内容请购买。