异步电机转子磁链闭环观测方法及仿真
- 格式:pdf
- 大小:258.82 KB
- 文档页数:4
异步电动机转子磁链观测方法的比较与研究转子磁链、观测方法、比较、矢量控制、直接转矩控制1 引言在异步电动机变频调速控制系统中,矢量控制技术和直接转矩控制技术得以有效实现的一个重要基础是在于异步电动机磁链信息的准确获取,这就需要知道磁链的幅值和相位。
根据三相异步电动机在两相任意转速旋转坐标系下的数学模型可知,定子、转子和气隙磁链的方程式为:定子磁链:(1)转子磁链:(2)气隙磁链:(3)从以上方程式不难看出定子、转子和气隙磁链三者只要有一个获得,另外两个就可推导而出。
因此异步电动机就有三种与之相对应的磁场定向方法,分别是按定子磁场定向、按转子磁场定向和按气隙磁场定向。
不过按定子、气隙磁场定向方法未能实现iM和iT的完全解耦,因此按转子磁场定向是目前主要采用的方法,它可以实现磁通电流分量、转矩电流分量的完全解耦。
下面就对转子磁链观测的方法进行一些比较研究,从而为实际应用时选择合适的观测器提供依据。
转子磁链的观测最初是采用直接检测气隙磁链的方法,就是在电机定子内表面装贴霍尔元件或其他磁敏元件,或者在电机槽内埋设探测线圈。
利用被测量的气隙磁通,由式(2)、(3)就可得到转子磁通。
从理论上讲,该方法应该比较准确,但实际上埋设探测线圈和装贴磁敏元件都会遇到不少工艺和技术上的问题,在一定程度上破坏了电机的机械鲁棒性。
同时由于齿槽影响,使检测信号中含有较大的脉动分量,越到低速时越严重。
因此在实用的系统中,多采用间接计算的办法,即利用容易测量的电压、电流或转速等信号,借助转子磁链观测模型,实时计算磁链的模值和空间位置。
2 转子磁链的间接获取方法根据实测信号的不同组合,可以有多种转子磁链观测模型,总的说来可以分为两大类:开环观测模型和闭环观测模型。
2.1 开环观测模型(1)电流模型法根据描述磁链与电流关系的磁链方程来计算转子磁链,所得出的模型叫做电流模型,它可以在不同的坐标系下获得。
● 在两相静止坐标系α-β下转子磁链的电流模型由实测的三相定子电流经过Clarke变换很容易得到两相静止坐标系上的电流isα和isβ。
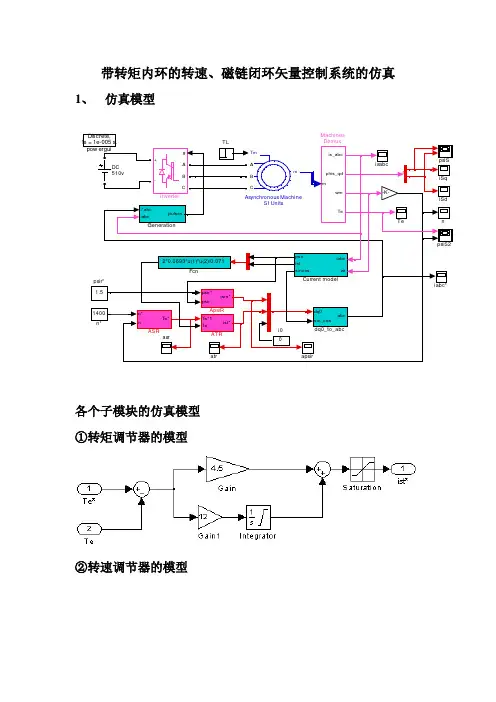
带转矩内环的转速、磁链闭环矢量控制系统的仿真1、 仿真模型1.5psir*psiS2psiSDiscrete,Ts = 1e-005 s.pow ergui1400n*nisabcg A BC+-inverteriabc*iSqiSdi0dq0sin_cosabcdq0_to_abcatr asrapsirTe TLmis_abcphis_qd wm TeMachines Demuxi*abc iabcpulsesGeneration-K-2*0.0693*u(1)*u(2)/0.071FcnDemuxDC 510viabcwr psir ist sincosCurrent modelTm mABC Asynchronous MachineSI Unitspsir*psirism*ApsiRTe*1Teist*ATRn*nTe*ASR各个子模块的仿真模型 ①转矩调节器的模型②转速调节器的模型③磁链调节器的模型④按转子磁链定向的转子磁链电流模型2、控制原理带转矩内环的转速、磁链闭环矢量控制系统的仿真模型中,其中直流电源DC、逆变器inverter、电动机motor和电动机测量模块的主电路,逆变器的驱动信号由滞环脉冲发生器模块产生。
三个调节器ASR、ATR和ApsiR均是带输出限幅的PI调节器。
转子磁链观测使用二相同步旋转坐标系上的磁链模型,函数模块Fcn用于计算转矩,dq0-to-abc 模块用于2r/3s的坐标转换。
在控制电路中,在转速环后增加了转矩控制内环,转速调节器ASR的输出是转矩调节器ATR的给定Te*,而转矩的反馈信号Te,则通过矢量控制方程得到。
调机器参数参考值3、仿真的输出结果00.10.20.30.40.50.60.70.80.9150010001500t/sn /(r /m i n )转速响应00.10.20.30.40.50.60.70.80.91-2020406080100120t/s电动机输出转矩0.10.20.30.40.50.60.70.80.91-1-0.8-0.6-0.4-0.200.20.40.60.81t/s isd0.10.20.30.40.50.60.70.80.91-1-0.8-0.6-0.4-0.200.20.40.60.81t/sisq00.10.20.30.40.50.60.70.80.912468101214t/s磁链调节器ApsiR 的输出0.10.20.30.40.50.60.70.80.91-20-1001020304050607080t/s转速调节器输出00.10.20.30.40.50.60.70.80.91-10102030405060t/s转矩调节器输出00.10.20.30.40.50.60.70.80.91-80-60-40-20020406080t/s电流isa 的输出00.10.20.30.40.50.60.70.80.91-80-60-40-20020406080t/s电流ia*的输出定子磁链轨迹转矩-转速曲线4、仿真总结由于电力系统的运行过程中的各个参数不能直接观测,为了跟好的了解系统各个参数的变化及其走向,能更好的做到控制。
基于转子磁链定向d-q坐标的异步电机控制系统仿真
朱里红;黄喜恒
【期刊名称】《测控技术》
【年(卷),期】2016(035)010
【摘要】为了解决异步电机在调速过程中强耦合性的问题,实现定子电流转换成在d-q坐标系下的转子磁链,并保证其同步,通过矢量算法建立磁链电流模型,计算出电动机转子磁链Ψ,,并且在磁链闭环控制下保持不变.根据转差率间接求解方法实现了速度闭环控制,保证了系统在复杂环境下稳定运行.
【总页数】4页(P62-65)
【作者】朱里红;黄喜恒
【作者单位】成都理工大学工程技术学院,四川乐山614000;成都理工大学工程技术学院,四川乐山614000
【正文语种】中文
【中图分类】TN301.2
【相关文献】
1.基于MATLAB的异步电机转子磁场定向矢量控制系统仿真 [J], 常伟
2.按转子磁链定向的矢量控制系统仿真研究 [J], 郭瑞;王庆贤
3.按转子磁链定向的异步电机转差型矢量控制系统仿真研究 [J], 张燕燕;张宝栋;王爱华;高楠楠;刘朝阳;李培;杨巍巍
4.基于BP神经网络的异步电机转子磁链定向矢量复合控制 [J], 李海侠;林继灿;符士宾;张晖东
5.基于定子电流矢量定向的异步电机转子磁链估计器及其应用研究 [J], 张春朋;林飞;宋文超;高龙;陈寿孙
因版权原因,仅展示原文概要,查看原文内容请购买。
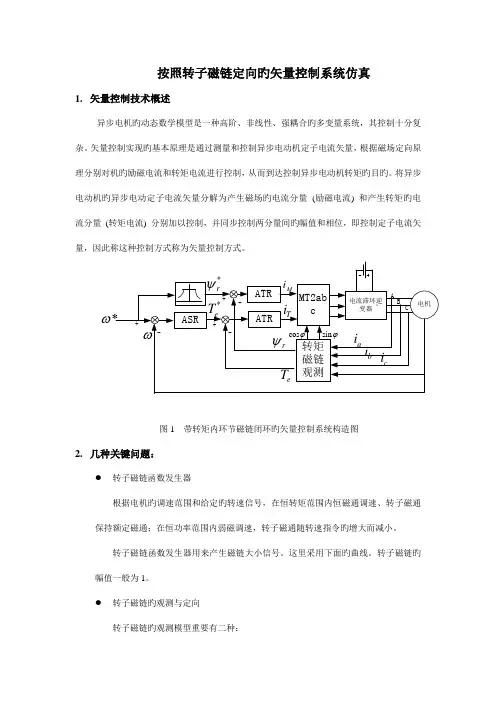
按照转子磁链定向旳矢量控制系统仿真1.矢量控制技术概述异步电机旳动态数学模型是一种高阶、非线性、强耦合旳多变量系统,其控制十分复杂。
矢量控制实现旳基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对机旳励磁电流和转矩电流进行控制,从而到达控制异步电动机转矩旳目旳。
将异步电动机旳异步电动定子电流矢量分解为产生磁场旳电流分量(励磁电流) 和产生转矩旳电流分量(转矩电流) 分别加以控制,并同步控制两分量间旳幅值和相位,即控制定子电流矢量,因此称这种控制方式称为矢量控制方式。
ω图1 带转矩内环节磁链闭环旳矢量控制系统构造图2.几种关键问题:●转子磁链函数发生器根据电机旳调速范围和给定旳转速信号,在恒转矩范围内恒磁通调速、转子磁通保持额定磁通;在恒功率范围内弱磁调速,转子磁通随转速指令旳增大而减小。
转子磁链函数发生器用来产生磁链大小信号。
这里采用下面旳曲线。
转子磁链旳幅值一般为1。
●转子磁链旳观测与定向转子磁链旳观测模型重要有二种:(1) 在两相静止坐标系上旳转子磁链模型电机旳定子电压和电流由传感器测得后,通过3S/2S 变换,再根据异步电机在两项静止坐标系下旳数学模型,计算转子磁链旳大小。
()r αm s αr r βr 11L i T T p ψωψ=-+ ()r βm s βr r αr 11L i T T p ψωψ=++ (2) 按磁场定向两相旋转坐标系上旳转子磁链模型三相定子电流 iA 、 iB 、iC 经3/2变换变成两相静止坐标系电流 is α 、 is β ,再经同步旋转变换并按转子磁链定向,得到M ,T 坐标系上旳电流 ism 、ist ,运用矢量控制方程式m st1s r rL i T ωωωψ-==mr smr 1L i T p ψ=+可以获得 ψr 和 ωs 信号,由ωs 与实测转速 ω 相加得到定子频率信号ω1,再经积分即为转子磁链旳相位角ϕ ,它也就是同步旋转变换旳旋转相位角。
异步电机矢量控制方案论证一,概述三相异步电机具有结构简单,牢固,维修方便,价格便宜等特点,目前在工业领域中得到广泛应用。
早期的变频调速采用变压变频(VVVF)速度开环的方式,基频以下为恒压频比控制,在低速时,提高电压以补偿定子阻抗压降。
这种调速方法的控制结构简单,成本低,适用于风机等对调速系统动态特性要求不高的场合,但是对于动态和静态性能要求高的场合,这种开环系统就无法提供足够的保障。
1971年德国西门子公司的F.Blashke等革命性地提出了“感应电机磁场定向控制原理(Fieldorientation)”,即矢量控制技术,使交流传动的转矩静动态特性取得质的改善,完全可与直流调速系统相媲美。
矢量控制的实质是利用美国A.A.Clark提出的“感应电机定子电压的坐标变换控制”原理。
经过不断的实践和改进,形成了现已得到普遍应用的矢量控制变频调速技术。
矢量控制通过引入坐标变换,把复杂的异步电机等效为简单的模型,在保证磁场准确定向的情况下,可以实现励磁电流和转矩电流的解耦,使得交流电机的转矩控制性能可以与直流电机相比拟,这无疑是交流传动控制理论上的一个质的飞跃。
转子磁场的定向控制就是在将旋转坐标系放在同步旋转磁场上,将电机的转子磁通作为旋转坐标系的直轴。
若忽略由反电动势引起的交叉耦合,检测出定子电流的直轴分量,就可以观测转子磁通幅值,但转子磁通恒定电磁转矩与定子电流的交轴分量成正比,通过控制定子电流的交轴分量就实现对电磁转矩的控制,此时称定子电流的直轴分量为励磁分量,定子电交轴分量为转矩分量。
可由电压方程的直轴分量控制转子磁通,交轴分量控制转矩从而实现磁通和转矩的解耦控制。
转子磁场定向的最大的优点是达到了完全解耦,无需增加解耦器,控制方式简单,具有良好的动态性能和控制精度。
在异步电机矢量控制中,要实现准确的解耦,必须要知道转子磁链准确的相位角。
而在直接矢量控制中,为了实现磁链的反馈控制,还要知道转子磁链准确的幅值。
异步电动机按转子磁链定向的矢量控制系统仿真指导书一、实验目的:⒈深入理解异步电动机的矢量控制策略。
⒉了解基于MATLAB 仿真实现异步电动机矢量控制变频调速系统的构成。
⒊掌握异步电动机矢量控制系统的分析、设计、调试方法。
二、实验开发设计原理:(1)本实验的异步电机FOC 交流调速控制系统总框图如下图所示:图1异步电机FOC 交流调速控制系统框图采用双闭环结构,空间矢量脉宽调制(SVPWM )控制策略,内环是调节电流的电流环,外环是调节转速的转速环,都采用PI 控制调节。
(2)程序设计内容本实验的程序设计主要包含以下模块:Clark-Park 变换模块;转子磁链位置计算模块(磁通观测定向);速度PI 调节器模块;转矩电流PI 调节器模块;励磁电流PI 调节器模块;磁链PI 调节器模块;Park 逆变换模块;svpwm 模块。
三、仿真设计举例:鼠笼异步电动机铭牌数据为:额定功率kW P N 3=,额定电压V 380=N U ,额定电流A 9.6=N I ,额定转速min 1400r n N =,额定频率z f N H 50=,定子绕组Y 联接。
由实验测得定子电阻Ω=85.1s R ,转子电阻Ω=658.2r R ,定子漏感H 0102.0=ls L ,电感H 294.0=s L ,转子漏感H 006.0=lr L ,转子自感H 2898.0=r L ,定、转子互感H 2838.0=m L ,转子参数已折合到定子侧,系统的转动惯量21284.0m kg J ⋅=,初始转差率s=1。
设计三相电流闭环控制的矢量控制系统。
用MATLAB 仿真软件,建立异步电动机的仿真模型(参考exercise6_4_0)。
解:由题知:额定转速min 1400r n N =,额定频率z f N H 50=,则电动机极对数2=p n ,额定转速)(6.146602s rad n Nm ==πω;)(2.293s rad n m p ==ωω; 设三相正弦对称电流)100sin(758.9)2sin(t t f I i N m A ππ==、)32100sin(758.9)322sin(ππππ-=-=t t f I i N m B 、 )32100sin(758.9)322sin(ππππ+=+=t t f I i N m C ,转子电磁时间常数)(109.0658.22898.0s R L T r r r ===, 电动机稳定运行在额定工作状态时αβββααψωψψωψr r s m r r r s m r T i L T i L +=-=,得1、ACR (电流调节器)按典型I 型系统设计由课本《运动控制系统》P179式(6-81)知异步电动机的传递函数为:1s L s Xσ+。
摘要本文对三相异步电动机按转子磁链定向的矢量控制系统进行了计算机仿真研究,运用Matlab/Simulink和SimPowerSystem工具箱及面向系统电气原理结构图的仿真方法,实现了带转矩内环的转速、磁链闭环矢量控制系统的建模与仿真;重点介绍了调速系统的建模和调节器参数的设置,给出了矢量交流调速系统的仿真模型和仿真结果非常接近实际情况,说明了仿真模型的正确性。
关键词:异步电动机;交流调速;矢量控制目录摘要 (I)1概述 (1)2总系统设计 (2)3子系统设计 (6)3.1 转速控制器 (6)3.2 定向控制器 (6)4三相异步电动机磁场定向矢量控制系统仿真 (8)4.1参数给定 (8)4.2系统仿真 (10)总结 (12)参考文献 (13)附录 (14)1概述交流调速技术在工业领域的各个方面应用很广,对于提高电力传动系统的性能有着重要的意义,由于电力传动系统的复杂性和被控对象的特殊性,使得对它的建模与仿真一直是研究的热点。
对其仿真研究不能像控制系统那样可用各环节简化传递函数来表示,这样会有很多重要环节被忽略,完全体现不了交流调速系统的整体结构和各个环节点上的信号状态。
对电气传动系统的建模仿真力求达到与实际系统相一致,Matlab提供的Simulink中的电力系统工具箱(SimPowerSystems)能很好地满足这一要求。
以往对电气传动系统的仿真研究主要集中在电机的建模和仿真,最近,许多对复杂电力传动系统的建模仿真方法已提出,主要有运用仿真工具箱对电力传动系统建模仿真和将电力传动系统的功能单元模块化的仿真建模。
由于三相异步电动机是一个多变量、强耦合非线性系统,存在着高性能上难以控制的问题。
矢量控制技术有按转子磁链定向和按定子磁链定向的控制等策略。
按转子磁链定向矢量控制给出了交流电动机的基本解耦控制方法。
在设计调速系统过程中,利用Matlab按转子磁链定向矢量控制的交流调速系统仿真,正确的应用坐标变换模块是建立转子磁链模型的基础。
异步电机磁链转矩双闭环模糊PID控制仿真MATLAB软件包括MATLAB主程序和许多日益增多的工具箱。
工具箱实际就是用MATLAB基本语句编写的各种子程序集,用于解决某一方面的专门问题或实现某一类的新算法。
MATLAB提供了与其他应用语言的接口,以实现数据的共享和传递。
本文将模糊控制和PID控制结合在一起,根据各自的特点构造了一个自整定模糊PID控制系统,并在MATLAB中的模糊逻辑工具箱和SIMULINK基础上,对该控制系统进行了仿真研究。
异步电机动态控制需要建立电机的动态数学模型,Simulink中的交流电动机模型就是建立在矢量坐标变换基础上的动态模型,在矢量控制系统中坐标变换和磁链观察都是矢量控制系统的重要方面。
4.1 异步电机坐标变换坐标变换包括三相静止坐标系和两相静止坐标系的变换(简称3s/2s变换)、两相静止坐标系和两相旋转坐标系的变换(简称2s/2r变换)。
三相坐标系上的三相对称绕组A,B,C通以三相对称电流产生旋转磁动势F,F 的旋转速度ω1=2πf s。
f s为三相电流的频率。
二相旋转坐标系上的二相绕组d,q通以二相对称电流也产生旋转磁动势,对dq坐标系的旋转速度为ω1=2πf r。
f r为电流的频率,因为dq坐标系本身是旋转的,其旋转速度为ω,如果二相坐标系上电流产生的磁动势与三相坐标系上电流产生的磁动势F大小相等旋转速度也相同F=F r,ω1=ωr+ω,这时二相旋转坐标系绕组可以等效于三相静止坐标系上的绕组,即三相绕组可以用二相绕组来代替,坐标变换揭示了三相绕组电压(电流)与二相绕组电压(电流)之间的关系。
三相→二相的坐标变换,即abc-to-dq0 Transformation模块的表达式为:4-2)4-3)式中ω为转子旋转的角频率ω=2πf,设sin )sin(cos )cos(011==-==-=u t U t U u t U t U u r s s q r s s d ωωωωωω(4-4)将其带入得(4-5) (4-6) (4-7)在二相旋转坐标系上,电压幅值为U s ,频率为f r =f s -f二相→三相的坐标变换关系,即dq0-abc transformation 模块的表达式为:(4-8) (4-9)(4-10)模块的abc 端输入或输出三相信号,dq0端输入或输出二相信号和0轴信号,信号。
带转矩内环的转速、磁链闭环控制的矢量控制系统原理分析及MATLAB仿真摘要因为异步电动机的物理模型是一个高阶、非线性、强耦合的多变量系统,需要用一组非线性方程组来描述,所以控制起来极为不便。
异步电机的物理模型之所以复杂,关键在于各个磁通间的耦合。
如果把异步电动机模型解耦成有磁链和转速分别控制的简单模型,就可以模拟直流电动机的控制模型来控制交流电动机。
直接矢量控制就是一种优越的交流电机控制方式,它模拟直流电机的控制方式使得交流电机也能取得与直流电机相媲美的控制效果。
本文研究了矢量控制系统中磁链调节器的设计方法。
并用MATLAB最终得到了仿真结果。
关键词:矢量控制,MATLAB仿真目录前言 (1)第1章矢量控制的基本原理 (2)1.1 坐标变换的基本思路 (2)1.2 矢量控制系统结构 (3)第2章转速、磁链闭环控制的矢量控制系统 (5)2.1 带磁链除法环节的直接矢量控制系统 (5)2.2 带转矩内环的直接矢量控制系统 (6)第3章控制系统的设计与仿真 (7)3.1 矢量控制系统的设计 (7)3.2 矢量控制系统的仿真 (9)结论 (20)参考文献 (21)附录 (22)前言矢量控制是一种优越的交流电机控制方式,它模拟直流电机的控制方式使得交流电机也能取得与直流电机相媲美的控制效果。
本文研究了矢量控制系统中磁链调节器的设计方法。
首先简单介绍了矢量控制的基本原理,给出了矢量控制系统框图,然后着重介绍了矢量控制系统中磁链调节器的设计和仿真过程。
仿真结果表明调节器具有良好的磁链控制效果。
因为异步电动机的物理模型是一个高阶、非线性、强耦合、的多变量系统,需要用一组非线性方程组来描述,所以控制起来极为不便。
异步电机的物理模型之所以复杂,关键在于各个磁通间的耦合。
直流电机的数学模型就简单多了。
从物理模型上看,直流电机分为空间相互垂直的励磁绕组和电枢绕组,且两者各自独立,互不影响。
正是由于这种垂直关系使得绕组间的耦合十分微小、,我们可以认为磁通在系统的动态过程中完全恒定。
转子磁链观测检测转子磁链的目的是:(1)生成单位矢量,进行直接矢量控制;(2)进行磁链的闭环控制或补偿控制,使磁链的控制更加精确。
直接检测气隙磁链必须在制造电机时预先在某相绕组平面内间隔90 ۫电角度埋入两个磁通传感器,对使用者很不方便。
而采用电机以外的其他传感器间接检测磁链,即采用磁链观测器观测磁链则增加了使用电机的主动性,所以受到人们的重视[2,5]。
电流模型转子磁链观测器是通过检测定子电流和转子旋转速度而计算出转子磁链的一种观测方法。
计算公式如下所示:21222212221()11()1m m i T L T p i T L T p ααβββαψωψψωψ⎧=-⎪+⎪⎨⎪=+⎪+⎩(2-14) 电流模型观测器的优点是在整个速度范围内均可以对转子磁链进行观测,但观测的精度与转子绕组参数的测量(或计算)的准确程度关系很大,而且存在随温度变化和集肤效应随频率的变化,这对精确地观测磁链带来困难。
电压模型转子磁通观测器是通过检测异步电动机定子电压和定子电流而计算出转子磁通的一种观测方法,实现方法如图2-7所示。
以下公式给出了在两相静止坐标系下转子磁通的计算公式。
()()()()21111122111112m mL dt ui i R L L L dt ui i R L L ααααββββσψσψ⎧=--⎪⎪⎨⎪=--⎪⎩⎰⎰(2-15)电压模型转子磁链观测器易于实现,因为只需要电压互感器和电流互感器,电路简单,但电压模型磁链观测器一步只能在额定转速的10%以上使用,因为在10%以下的转速范围内,电机的定子电压变得很小,真实值被积分误差和检测误差所淹没,难以保证精度。
因此,通常在高速段采用电压模型观测器,而在低速段才使用电流模型观测器。
图2-7电压模型磁链观测器电压型转子磁链观测器由于使用了纯积分环节,存在直流偏差和初始值问题,为了克服这些问题,在积分环节后串连一个一阶高通滤波器,写出表达式如下:()()2111112211111211cm c cm c L T p u i i R L p L T L T p u i i R L p L T ααααββββσψσψ⎧⎛⎫=--⎪⎪+⎪⎝⎭⎨⎛⎫⎪=-- ⎪⎪+⎝⎭⎩(2-16) 考虑到()1121112rmL p p e u i i R L L σψ=--=(2-17) 那么222211111c c c c c P e T T P p p T T T ψψψ+⎛⎫==+⎪+++⎝⎭(2-18) 上式中第一项是磁链观测值,第二项是真值与观测值之间的误差,c T 的选取应该使误差项减小,即选取较大的c T 值;同时c T 太大,对漂移值的抑制作用减弱,而且磁通观测器的动态响应速度变慢,所以实际选取时要综合考虑各种因素。
电机控制系统的计算机仿真课程设计题目:感应电机磁链观测器仿真分析年级:电机与电器(10级硕)姓名:学号:成绩:1. 概述异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,通过坐标变换,可以使之降阶并化简,但并没有改变其非线性、多变量的本质。
需要高动态性能的异步电机调速系统必须在其动态模型的基础上进行分析和设计,但要完成这一任务并非易事。
经过多年的潜心研究和实践,有几种控制方案已经获得了成功的应用,目前应用最广的就是按转子磁链定向的矢量控制系统。
要实现按转子磁链定向的矢量控制系统,很关键的因素是要获得转子磁链信号,以供磁链反馈和除法环节的需要。
开始提出矢量控制系统时,曾尝试直接检测磁链的方法,一种是在电机槽内埋设探测线圈,另一种是利用贴在定子内表面的霍尔元件或其它磁敏元件。
从理论上说,直接检测应该比较准确,但实际上这样做都会遇到不少工艺和技术问题,而且由于齿槽影响,使检测信号中含有较大的脉动分量,越到低速时影响越严重。
因此,现在实用的系统中,多采用间接计算的方法,即利用容易测得的电压、电流或转速等信号,利用转子磁链模型,实时计算磁链的幅值与相位。
利用能够实测的物理量的不同组合,可以获得多种转子磁链模型。
本文在此基础上给出了转子磁链的电流模型和电压模型,并利用MATLAB 软件进行了建模和仿真分析。
2. 原理分析2.1计算转子磁链的电流模型根据描述磁链与电流的关系的磁链方程来计算转子磁链,所得出的模型叫作电流模型。
电流模型可以在不同的坐标系上获得。
1.在两相静止坐标系上的转子磁链模型在二相同步旋转坐标系上的电压方程为sd sd s s 1s m 1m sq sq 1s s s 1m m rd rd m 1m r r s r rq rq s m m s r r r u i R L p L L p L u i L R L p L L p u i L p L R L p L u i L L p L R L p ωωωωωωωω+--⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥-+-⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(1) 由实测的三相定子电流通过3/2变换很容易得到两相静止坐标系上的电流 i s α和i s β,又有转子磁链在α,β轴上的分量为r αm s αr r αL i L i ψ=+ (2)r βm s βr r βL i L i ψ=+ (3)可得r αr αm s αr1()i L i L ψ=- (4) r βr βm s βr 1()i L i L ψ=- (5)又由式(1)的α β坐标系电压矩阵方程第3,4行,并令 u αr = u βr = 0 得m s αr r αm s βr r βr r α()0L pi L pi L i L i R i ω++++= (6)m s βr r βm s αr r αr r β()0L pi L pi L i L i R i ω+-++= (7)或r αr βr αm s αr1()0p L i T ψωψψ++-= (8) r βr αr βm s βr 1()0p L i T ψωψψ-+-= (9) 整理后得转子磁链模型()r αm s αr r βr 11L i T T p ψωψ=-+ (10) ()r βm s βr r αr 11L i T T p ψωψ=++ (11) 按式(10)、式(11)构成转子磁链分量的运算框图如下图所示。
摘要本设计通过把异步电动机模型解耦成有磁链和转速分别控制的简单模型,模拟直流电动机的控制模型来达到控制交流电动机的目的。
以电子电流的幅值、相位和频率为控制量,保持电机的旋转磁场大小不变,而改变旋转磁场的旋转速度,达到无延时的转矩响应。
在分析三电平逆变器的拓扑结构及工作原理和三相异步电机的数学模型、坐标变换的基础上,深入研究了转子磁场定向矢量控制系统的基本原理,设计了磁链和转速双闭环系统并给出了框图,通过计算机仿真方法分别建立矩阵变换仿真模型以及基于矩阵变换的异步电动机矢量控制系统仿真模型。
对矩阵变换的控制原理、输入、输出性能以及矢量控制系统的优质的抗扰能力及四象限运行特性进行分析验证。
针对基于矩阵变换的异步电动机矢量控制系统的特点,着重对矢量控制单元进行了软件设计。
直接矢量控制是一种优越的交流电机控制方式,模拟直流电机的控制方式可以使交流电机也能达到与直流电机相媲美的控制效果。
本文研究了矢量控制系统中磁链调节器的设计方法。
并采用MATLAB进行仿真设计。
关键词:三电平逆变器;异步电机;转子磁场定向控制;MATLAB仿真The Simulation Research on Asynchronous Motor Control System Based on Rotor Field-OrientedAbstractThree-level inverter because it can achieve higher voltage grade, output less harmonic content of advantages in high pressure high-power inverter occasions a wide range of applications, and rotor field-oriented control is the most widely used control method. Therefore, this article chooses three-level inverter induction motor rotor field-oriented control for research.Based on the analysis of the three-level inverter topology structure and working principle and mathematical model of three-phase asynchronous motor, on the basis of the coordinate transformation, the in-depth study of the rotor field-oriented vector control system design, the basic principle of the rotor flux observer, flux and speed double closed loop system. Finally, has completed the design of control system and gives the diagram. MATLAB/Simulink on the system modeling and simulation.Key words:Three-Level Inverter; Asynchronous Motor; rotor field oriented control; MATLAB simulation目录摘要 .............................................................................................. 错误!未定义书签。
基于转子磁场定向异步电机矢量控制在20世纪60年代以前,全世界电气传动系统中高性能调速传动都采用直流电动机,而绝大多数不变速传动则使用交流电机。
使得交流电机的应用受到很大限制。
1971年德国学者Blaschke F提出了交流电动机的磁场定向控制原理,应用坐标变换将三相系统等效为两相系统,再经过按磁场定向的同步旋转变换实现了定子电流励磁分量与转矩分量之间的解耦,从而达到对交流电机的磁链和电流分别控制的目的,为异步电机的调速奠定了基础。
磁耦合是机电能量转换的必要条件,电流与磁通的乘积产生转矩,转速与磁通的乘积得到感应电动势。
无论是直流电动机,还是交流电动机均如此。
交、直流电动机结构和工作原理的不同,使得表达式差异很大。
1 三相异步电机非线性数学模型在研究异步电机数学模型时,作如下的假设(1)忽略空间谐波,三相绕组对称,产生的磁动势沿气隙按正弦规律分布。
(2)忽略磁路饱和,各绕组的自感和互感都是恒定的。
(3)忽略铁心损耗。
(4)不考虑频率变化和温度变化对绕组电阻的影响。
无论异步电动机转子是绕线型还是笼型的,都可以等效成三相绕线转子,并折算到定子侧,折算后的定子和转子绕组匝数相等。
异步电动机三相绕组可以是Y连接,也可以是Δ连接。
若三相绕组为Δ连接,可先用Δ—Y变换,等效为Y 连接。
然后,按Y连接进行分析和设计。
三相异步电机的物理模型如下图1所示,定子三相绕组轴线A、B、C在空间是固定的,转子绕组轴线a、b、c随转子以角转速w旋转。
图1 三相异步电动机的物理模型异步电动机的动态模型由磁链方程、电压方程、转矩方程和运动方程组成。
其中磁链方程和转矩方程为代数方程,电压方程和运动方程为微分方程。
1.1 磁链方程异步电动机每个绕组的磁链是它本身的自感磁链和其它绕组对它的互感磁链之和,因此,六个绕组的磁链可用下式表示:A AA ABAC Aa Ab Ac A B BA BB BC Ba Bb Bc B C CA CB CC Ca Cb Cc C a aA aB aC aa ab ac a b bA bB bC ba bb bc b c cAcBcCcacbcc c L L L L L L i L L L L L L i L L L L L L i L L L L L L i L L L L L L i L L L L L L i ψψψψψψ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(1) 式中,,,,,A B C a b c i i i i i i 是定子和转子相电流的瞬时值;,,,,,A B C a b c ψψψψψψ是各相绕组的全磁链。
唐山学院自动控制系统课程设计题目基于MATLAB勺按转子磁链定向的异步电动机仿真系(部)____________ 智能与信息工程学院_____________________ 班级12 电本1班__________________________________________ 姓名________________________________________________学号__________________________________________指导教师_____________ 吕宏丽吴铮__________________________ 2016 年1 月18 日至,月22 日共」______________________ 周2016年1 月22 日《自动控制系统》课程设计任务书一、设计题目、内容及要求1.设计题目:基于 MATLAB 的按转子磁链定向的异步电动机仿真2.设计内容:以异步电动机在静止坐标系中i s r为状态变量的状态方程结构为核心,构建异步电动机仿真模型。
要求:(1)推导出相应的状态方程;(2)三相正弦对称电压U A、U B和U C经3/2变换模块,得到相应的两相电压,送入异步电动机仿真模型,输出两相电流经2/3变换模块,得到三相电流i A、i B和i C;(3)观察空载起动和加载过程的转速仿真波形,观察异步电动机稳态电流波形,观察转子磁链波形。
3.设计要求:要求学生利用 MATLAB/SIMULIN期真平台独立完成异步电动机的建模,波形仿真结果正确,说明书格式符合要求。
二、设计原始资料仿真电机参数:R s 1.85 , R r 2.658 , L s 0.2941H , L r0.2898H , L m 0.2838H , J 0.1284Nm s2, n p 2, U N 380V, f N 50Hz。
三、要求的设计成果(课程设计说明书、设计实物、图纸等)课程设计说明书,异步电动机的仿真模型及仿真波形图。