一种平面四杆机构的设计任务书
- 格式:doc
- 大小:1.42 MB
- 文档页数:49

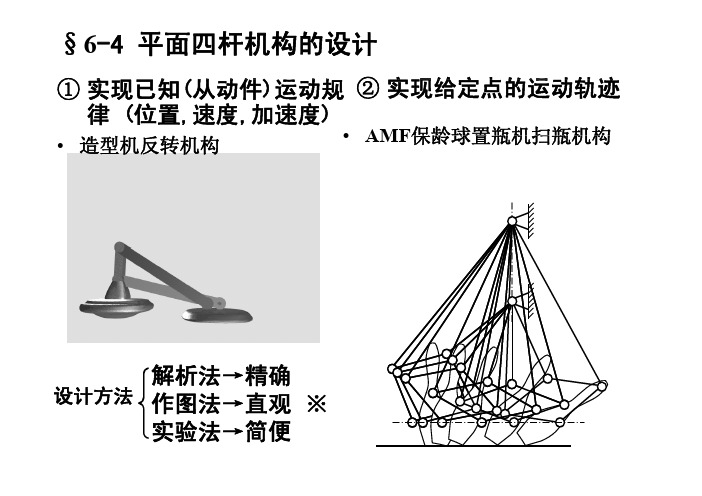
§6-4 平面四杆机构的设计实知从动件动规①实现已知(从动件)运动规律(位置,速度,加速度)②实现给定点的运动轨迹•AMF保龄球置瓶机扫瓶机构•造型机反转机构解析法→精确作图法→直观※设计方法实验法→简便一.按照给定的行程速比系数设计四杆机构(作图法)二.按给定连杆位置设计四杆机构(作图法)三.按给定两连架杆对应位置设计四杆机构(解析法)三按给定两连架杆对应位置设计四杆机构(解析法)四.按给定点的运动轨迹设计四杆机构(实验法)一.按照给定的行程速比系数设计四杆机构:1.:1180−=K oθ(1)可求出极位夹角θ分析:曲柄摇杆机构1+K (2) ∠C 1AC 2=θψ→如果三点位于同一圆上θA D B B 2同圆上,θ是C 1C 2弧上O 已知: 摇杆长度1的圆周角→如何作此圆L 3, 行程速比系数K, 摆角ψθ→ ∠C 1PC 2=θ(未知A 点)∠C C P=90°P 点→可作→连OC 2交圆于P 点21∠C 1C 2P=90°-θP解:(1)确定作图比例,任选D 点,作摇杆两极位C 1D 和C 2D(2)过C 1作C 1C 2垂线C 1M-θψC 1M 与C 2N 交于P 点作∠C 1C 2N=90θ,A B 1B 2D (3)过C 1、C 2、P O θP作圆L 在圆上任选一点A(4)AC 1=L 2-L 1,AC 2=L 2+L 1→→无数解L 1=1/2(AC 2-AC 1)以L 为半径作圆,交B ,B 点P 112→曲柄两位置MN注意:•作图比列规定•缩小比例:1:2,1:10等•放大比例:2:1,10:1等放大比例2.导杆机构:已知:机架长L 4 , K 1−K o m n 解:(1)任选固定铰链中心C →1180+==K ϕθ作导杆两极位Cm 和Cnψ= θA B 2m n (2)作摆角ψ的平分AC AC L B 1A θ线AC,取AC=L 4→固定铰中心AψB 1B 2(3)过A 作导杆极位垂线=AB →唯一解φAB 1(AB 2)→L 1AB 1CC3、设计曲柄滑块•已知:滑块的行程H=50mm,偏距已知滑块的行程H50偏距e=30mm,行程速比系数K=1.4eθH3、曲柄滑块机构2B 1C b aA 34v cH c 1c 2θ−o 90已知:H ,K ,e求运动学尺寸。

---------------------------------------------------------------最新资料推荐------------------------------------------------------平面四杆机构教学设计平面四杆机构1/ 29目录 CONTENTS教学分析2教学过程4Teaching AnalysisTeaching Process1教学设计Teaching Design3教学反思Teaching Refletion---------------------------------------------------------------最新资料推荐------------------------------------------------------ 目录 CONTENTS教学分析2教学过程4Teaching AnalysisTeaching Process1教学设计Teaching Design3教学反思Teaching Refletion3/ 29教学分析Teaching Analysis教材分析内容分析目标分析学情分析重难点分析7.1平面机构自由度与运动副材料力学工程力学机械设计液压传动第七章平面运动机构第八章齿轮传动机构第九章其他常用机构第十章滚动轴承第十一章轴和轴毂连接7.2平面机构运动简图 7.3机构具有确定运动的条件7.4平面四杆机构机电一体化专业基础课---------------------------------------------------------------最新资料推荐------------------------------------------------------ 教学分析Teaching Analysis教材分析内容分析目标分析学情分析重难点分析应用广泛日常的生产生活中很多装置及设备都应有平面四杆机构或者其变形形式类型多样拥有多种类型及其变形形式,需注意辨别0102平面四杆机构基础机构最简单的连杆机构,为以后学习多杆机构打下基础。
平面四杆机构教案设计------------------------------------------作者xxxx------------------------------------------日期xxxx《机械基础》教案第 10 次课2学时授课时间 90分钟课前教学准备1。
白板笔,示教板、用木材自制的两个铰链四杆机构及用Flash制作的相应内容的动画课件、展示台、投影仪一套、教师用机;2.学案(包括教学目标、重点、难点、自学练习题),师生人手一份。
ﻩ组织教学1.学生按时进入课室,师生互相问候。
2。
检查学生出勤、装束、精神状态情况。
3。
宣布本次课题的内容及任务.教学过程一、复习有关内容1.什么是机构?什么是平面机构?2.什么是低副?低副有哪几种类型?二、导入新课用多媒体播放世界上最大的起重机。
导入语:每一个机器都是由若干个机构或构件所组成,那么视屏中的起重机中那些机构和我们今天所学的知识有联系呢?我们带着疑问开始今天的课程!(5分钟)(6分钟)电教演示自制课件(打开多媒体课件)教学内容备注(包括:教学手段、时间分配、临时更改等)三、讲授新课一、平面连杆机构1、定义:由若干构件和低副组成的平面机构。
二、铰链四杆机构1、定义:由四个杆件通过铰链(转动副)连接而成的平面四杆机构。
2、结构特征(1)、四个构件(2)、运动副全为转动副机架曲柄—整转副3、组成连架杆摇杆-摆转副连杆4、铰链四杆机构的类型(4分钟)(4分钟)(4分钟)(5分钟)教学内容备注(包括:教学手铰链四杆机构曲柄摇杆机双曲柄机构双摇杆机构搅拌机惯性筛机构鹤式起重机配、临时更改等)(1)、曲柄摇杆机构以曲柄为主动件:回转摆动举例—搅拌机构以摇杆为主动件:摆动回转举例—缝纫机机构(2)、双曲柄机构错误!一般双曲柄机构:等速回转变速回转;举例—惯性筛机构错误!平行双曲柄机构:转向相同、转速相等(两曲柄长度相等且平行);举例—机车联动装置○3反向双曲柄机构:转向相反、转速不等(两曲柄长度相等但不平行);举例-车门启闭装置(5分钟)(3分钟)(3分钟)(3分钟)321DCFE B3521(a)(b)A4教学内容(包括:教学手段、时间分配、临时更改等)(3)、双摇杆机构摆动摆动举例—起重机错误!等腰梯形机构(两摇杆长度相等时) 举例—汽车转向梯形机构三、曲柄存在的条件1、曲柄存在条件(1)、在铰链四杆机构中,能使被连接的两个构件相对转动360度的转动副为整转副。

1 绪论1.1 课题背景平面连杆机构在重型机械、纺织机械、食品机械、包装机械、农业机械中都有广泛的应用。
但是要在尽可能短的时间内设计出一个满足多种性能要求的机构却不是一件很容易的事情。
过去人们已建立了一些四杆机构的设计方法,然而这些方法与工程设计的要求还有一段距离,常常花费很多时间却只得到一个不可行的设计方案。
因为机构的运动性能如急回特性K,压力角α,从动件的摆角Ψ,极位夹角θ与构件尺寸有关,本身的这些运动性能之间也都相互影响,比如,四杆机构中,从动件急回特性K完全取决于极位夹角θ的作用。
本篇论文主要研究工程中应用比较多的Ⅰ、Ⅱ曲柄摇杆机构的传动角γ,极位夹角θ与机构尺寸之间的关系,然后运用工程分析软件ADAMS针对机构进行运动学分析,从而能给出设计平面四杆机构时为保证有较好的特性时,选取构件尺寸的建议。
进而为工程应用提供依据。
1.2 平面四杆机构的基本型式平面四杆机构可分为铰链四杆机构和含有移动副的四杆机构。
其中只有转动副的平面四杆机构称为铰链四杆机构[1]。
在铰链四杆机构中,能作整周回转的称为曲柄,只能在一定角度范围内摆动的称为摇杆。
由于曲柄和摇杆长度的不同,又可以将铰链四杆机构分为曲柄摇杆机构、双曲柄机构和双摇杆机构[2]。
平面四杆机构最基本的型式为图1-1所示的曲柄摇杆机构。
图1-1中,AD为机架,AB和DC为连架杆。
其中构件AB能绕其固定铰链中心A作整周转动而称为曲柄。
构件DC只能绕其固定铰链中心D在一定范围内往复摆动而称为摇杆。
构件BC不与机架直接相联而仅仅连接两连架杆AB和DC,因而称为连杆。
连杆机构正是因为连杆的存在而得名[3]。
图1.1 曲柄摇杆机构两连架杆均为曲柄的铰链四杆机构称为双曲柄机构[4]。
图1-2中,AD为机架,AB和DC为曲柄。
其中构件AB、DC能绕其固定铰链中心A、D作整周转动而称为曲柄。
若两对边构件长度相等且平行,则称为正平行四边形机构。
图1.2 双曲柄机构两连架杆均为摇杆的铰链四杆机构称为双摇杆机构[5]。
毕业设计(论文)任务书(理工类)理工科类本科生毕业设计(论文)开题报告论文(设计)题目一种平面四杆机构的设计研究作者所在系别机械工程系作者所在专业机械设计制造及其自动化作者所在班级作者姓名作者学号 2 2指导教师姓名指导教师职称教授完成时间年月毕业设计(论文)开题报告本科生毕业设计(论文)文献综述设计(论文)题目一种平面四杆机构的设计研究作者所在系别机械工程系作者所在专业机械设计制造及其自动化作者所在班级作者姓名作者学号 2指导教师姓名指导教师职称教授完成时间年12月毕业设计(论文)文献综述平面四杆机构在现实中的应用十分广泛,它发展到现在也有了多种多样的形式,平面四杆机构和液压,气压传动设备一起使用,这样可以使机构的作用更加突出。
如图所示的就是一种液压支盘成形机中的平面四杆机构。
毕业设计(论文)文献综述本科生毕业设计 (论文)外文翻译原文标题Computer-aided curvature analyses Of planar four-bar linkage mechanism译文标题平面四杆机构的计算机辅助曲率分析作者所在系别机械工程系作者所在专业机械设计制造及其自动化作者所在班级作者姓名作者学号 2指导教师姓名指导教师职称教授完成时间年12月北华航天工业学院教务处制我们分解方程(2)成实部和虚部得到参数2λ,然后,把2λ替代进方程(图3图解瞬时中心拐点A J和B J已经从公式4中推出,图解法可以从作者【6】获得。
图四:拐点A J和B J的创建用同样的方法,我们把公式(7)分解为实部和虚部得到λ和λ,并且把2.5.根据A ,B 两点可写出方程CSC 两倍,并从这两个方程中可确定图6:tˆ—n ˆ坐标系的确立和和2.7. 布雷斯圆ω,和角加速度α在解上面的方程前,我们必须确定杆三的角速度3布雷斯圆的中心是-3.6892,-i2.0647.这个圆的半径是计图7:布雷斯圆返回圆和拐点圆关于瞬时中心1是对称的,分析结果为:We decompose Eq. (2) into real and imaginary parts to getThe inflection points JA and JB are shown in Fig.4 .The graphical can be obtained from the author [6].In the same manner, we decompose Eq. (7) into real and imaginary parts to obtain the parameters kA and kB and substitute kA or kB into Eq. (7)the diameter vectorThe results are constructed in Fig.5 .Hence, all vectors with respect to the original coordinate system XSimilarly, the CSC equation for point B isSolving simultaneously, Eqs. (11) and (12) by Cramer_s rule, we obtain2.7. Bresse circleBefore solving the above equation, we have to determine the angularThe center of the Besse circle is -3.6892 -i2.0647. The radius of this is Thein Fig.7 .2.12. Fixed centrode (FC) and moving centrode (MC)We can draw the instant center I by varying the input crank angle h2 with respect to the fixed frame X–Y and (r,h) of the coupler link AB topoint is the instant center, the four-bar注:1. 指导教师对译文进行评阅时应注意以下几个方面:①翻译的外文文献与毕业设计(论文)的主题是否高度相关,并作为外文参考文献列入毕业设计(论文)的参考文献;②翻译的外文文献字数是否达到规定数量(3 000字以上);③译文语言是否准确、通顺、具有参考价值。
2. 外文原文应以附件的方式置于译文之后。
目录一、总论 .......................................................... 错误!未定义书签。
(一)项目概况 .......................................... 错误!未定义书签。
(二)项目编制依据 .................................. 错误!未定义书签。
(三)问题与建议 ...................................... 错误!未定义书签。
二、项目建设的背景和必要性...................... 错误!未定义书签。
(一)政策背景分析 .................................. 错误!未定义书签。
(二)项目区社会经济状况...................... 错误!未定义书签。
(三)本行业及关联产业发展现状.......... 错误!未定义书签。
(四)项目建设的必要性 .......................... 错误!未定义书签。
三、承办单位概况 .......................................... 错误!未定义书签。
(一)概况 .................................................. 错误!未定义书签。
(二)研发能力 .......................................... 错误!未定义书签。
(三)财务状况 .......................................... 错误!未定义书签。
(四)法人代表基本情况 .......................... 错误!未定义书签。
四、市场分析与销售方案 .............................. 错误!未定义书签。
(一)市场分析 .......................................... 错误!未定义书签。
(二)市场竞争优势分析 .......................... 错误!未定义书签。
(三)营销方案、模式及策略.................. 错误!未定义书签。
五、项目选址与建设条件 .............................. 错误!未定义书签。
(一)场址所在位置现状 .......................... 错误!未定义书签。
(二)场址建设条件 .................................. 错误!未定义书签。
六、建设方案 .................................................. 错误!未定义书签。
(一)建设规模与布局 .............................. 错误!未定义书签。
(二)建设目标与功能定位...................... 错误!未定义书签。
(三)产品质量标准 .................................. 错误!未定义书签。
(四)构建绿色有机农产品流通体系...... 错误!未定义书签。
(五)土建工程 .......................................... 错误!未定义书签。
(六)主要设备 .......................................... 错误!未定义书签。
七、总图、运输与公共辅助工程.................. 错误!未定义书签。
(一)总图布置 .......................................... 错误!未定义书签。
(二)公共辅助工程 .................................. 错误!未定义书签。
八、节能减排措施 .......................................... 错误!未定义书签。
(一)能耗及污染分析 .............................. 错误!未定义书签。
(二)单项与建筑节能工程...................... 错误!未定义书签。
(三)节能措施综述 .................................. 错误!未定义书签。
九、环境影响评价 .......................................... 错误!未定义书签。
(一)环境影响......................................... 错误!未定义书签。
(二)环境保护与治理措施 .................... 错误!未定义书签。
(三)评价与审批..................................... 错误!未定义书签。
十、组织机构与人力资源配置...................... 错误!未定义书签。
(一)组织机构与职能划分...................... 错误!未定义书签。
(二)劳动定员 .......................................... 错误!未定义书签。
(三)经营管理模式 .................................. 错误!未定义书签。
(四)经营管理措施 .................................. 错误!未定义书签。
(五)技术培训 .......................................... 错误!未定义书签。
(六)劳动保护与安全卫生...................... 错误!未定义书签。
十一、项目实施进度 ...................................... 错误!未定义书签。