自动控制原理 (2)
- 格式:doc
- 大小:24.55 KB
- 文档页数:2
自动控制原理(二)_华中科技大学中国大学mooc课后章节答案期末考试题库2023年1.死区特性可减小稳态误差。
参考答案:错误2.已知两系统的传递函数分别为W1(s)和W2(s),两子系统串联联结和并联连接时,系统的传递函数阵分别为:()【图片】【图片】【图片】参考答案:_3.对于线性定常系统,可控性与可达性是等价的。
参考答案:正确4.对于线性离散控制系统,可以直接应用连续系统劳斯判据判断系统稳定性。
()参考答案:错误5.判断以下二次型函数的符号性质:【图片】参考答案:负定6.只要系统可观,则可用输出反馈(至状态微分)任意配置闭环极点使系统稳定。
参考答案:正确7.描述函数法主要研究自持震荡参考答案:正确8.具有饱和非线性元件的非线性控制系统如下图所示,下列说法正确的是:()【图片】参考答案:当K=5时,系统稳定_当K=15时,系统自振荡频率为_当K=10时,系统存在稳定振荡点9.已知【图片】的拉氏变换为【图片】, 求【图片】的Z变换。
()参考答案:_10.某离散控制系统【图片】(单位反馈T=0.1)当输入r(t)=t时.该系统稳态误差为∞。
参考答案:错误11.相轨迹振荡趋于原点,该奇点为。
参考答案:稳定焦点12.采样系统的闭环极点在Z平面上的分布对系统的动态响应起着决定性作用,采样系统的暂态特性主要由闭环脉冲传递函数的极点来确定。
()参考答案:正确13.非线性系统自持振荡与有关。
参考答案:系统结构和参数14.设闭环离散系统如图所示,其中采样周期为【图片】。
【图片】则下列说法正确的是()参考答案:作用下的稳态误差为_作用下的稳态误差为15.对于下述系统的能控能观分解后的各子系统(特征值、和互异),以下说法正确的是:【图片】参考答案:x1。
x2-x3-x4子系统状态完全能控_x5子系统状态完全不能控16.状态反馈既不改变系统的可控性也不改变系统的可观性参考答案:错误17.对非线性系统:【图片】【图片】其在原点处渐进稳定,但不是大范围渐进稳定的。
⾃动控制原理试题库完整(2)⼀、选择题1. 在伯德图中反映系统抗⾼频⼲扰能⼒的是( C )A. 低频段B. 中频段C. ⾼频段D. ⽆法反映2. 对于⼀、⼆阶系统来说,系统特征⽅程的系数都是正数是系统稳定的( C )A. 充分条件B. 必要条件C. 充分必要条件D. 以上都不是3. 开环传递函数G(s)H(s)=)p s )(p s ()z s (K 211+++,其中p 2>z 1>p 1>0,则实轴上的根轨迹为(A )A.(-∞,-p 2] [-z 1,-p 1]B. (- ∞,-p 2]C. [-p 1,+ ∞)D. [-z 1,-p 1]4. ⼆阶振荡环节的相频特性θ(ω) ,当ω→∞ 时,其相位移θ(ω) 为( B )A .-270°B .-180°C .-90°D .0°5. ⽤频域法分析控制系统时,最常⽤的典型输⼊信号是( D )A. 脉冲函数B. 斜坡函数C. 阶跃函数D. 正弦函数 6. 确定根轨迹与虚轴的交点,可⽤(A)A .劳斯判据B .幅⾓条件C .幅值条件D .dk/ds=07. 设⼀单位反馈控制系统的开环传递函数为)2(4s (G 0+=s s K ),要求20K v =,则K=( A )A .10B .20C .30D .408. 过阻尼系统的动态性能指标是调整时间s t 和( C )A .峰值时间p tB .最⼤超调量σC .上升时间r tD .衰减⽐σ/σ′ 9. 设某系统开环传递函数为)1)(10s s (10s (G 2+++=s ),则其频率特性奈⽒图起点坐标为( C ) A .(-10,j0) B .(-1,j0) C .(1,j0) D .(10,j0)10. ⼀阶系统1TS K S (G +=)的时间常数T 越⼤,则系统的输出响应达到稳态值的时间( A ) A .越长 B .越短 C .不变 D .不定11. 当⼆阶系统的根分布在根平⾯的虚轴上时,系统的阻尼⽐为( B )A .ξ<0B .ξ=0C .0<ξ<1D .ξ≥ 112. 同⼀系统,不同输⼊信号和输出信号之间传递函数的特征⽅程(A )A .相同B .不同C .不存在D .不定13. 传递函数反映了系统的动态性能,它与下列哪项因素有关?(C )A. 输⼊信号B. 初始条件C. 系统的结构参数D. 输⼊信号和初始条件14. 奈奎斯特稳定性判据是利⽤系统的( C ) 来判断闭环系统稳定性的⼀个判别准则。
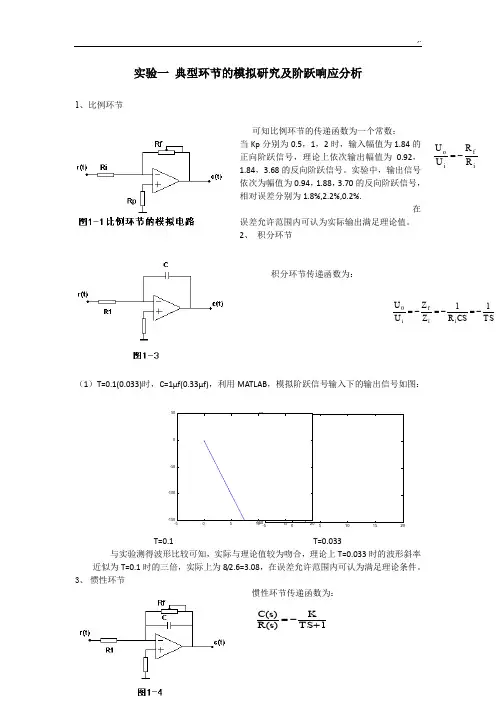
实验一 典型环节的模拟研究及阶跃响应分析1、比例环节可知比例环节的传递函数为一个常数:当Kp 分别为0.5,1,2时,输入幅值为1.84的正向阶跃信号,理论上依次输出幅值为0.92,1.84,3.68的反向阶跃信号。
实验中,输出信号依次为幅值为0.94,1.88,3.70的反向阶跃信号, 相对误差分别为1.8%,2.2%,0.2%. 在误差允许范围内可认为实际输出满足理论值。
2、 积分环节积分环节传递函数为:(1)T=0.1(0.033)时,C=1μf (0.33μf ),利用MATLAB ,模拟阶跃信号输入下的输出信号如图: T=0.1 T=0.033与实验测得波形比较可知,实际与理论值较为吻合,理论上T=0.033时的波形斜率近似为T=0.1时的三倍,实际上为8/2.6=3.08,在误差允许范围内可认为满足理论条件。
3、 惯性环节惯性环节传递函数为:if i o R RU U -=TS1CS R 1Z Z U U i i f i 0-=-=-=1TS K)s (R )s (C +-=K = R f /R 1,T = R f C,(1) 保持K = R f /R 1 = 1不变,观测T = 0.1秒,0.01秒(既R 1 = 100K,C = 1μf ,0.1μf )时的输出波形。
利用matlab 仿真得到理论波形如下: T=0.1时 t s (5%)理论值为300ms,实际测得t s =400ms 相对误差为:(400-300)/300=33.3%,读数误差较大。
K 理论值为1,实验值2.12/2.28,相对误差为(2.28-2.12)/2.28=7%与理论值较为接近。
T=0.01时t s (5%)理论值为30ms,实际测得t s =40ms 相对误差为:(40-30)/30=33.3%由于ts 较小,所以读数时误差较大。
K 理论值为1,实验值2.12/2.28,相对误差为(2.28-2.12)/2.28=7%与理论值较为接近(2) 保持T = R f C = 0.1s 不变,分别观测K = 1,2时的输出波形。
离散系统闭环脉冲传递函数的极点,则动态响应为(已知,则有的拉氏变换为,则判断题图中系统是否稳定非线性系统的及的轨迹如下图所示,试问)已知非线性系统的微分方程是,两输入,两输出的系统,其模拟结构图如图所示,其状态空间表达式为:()B.C.已知系统传递函数,则系统的约旦标准型的实现为∙B.∙C.D.∙A.∙B.∙C.∙D.正确答案:B19已知系统:已知,下列有关该系统稳定性说法正确的是()闭环脉冲传递函数分别为,输出为已知计算机控制系统如下图所示,采用数字比例控制,其中,,系统的闭环脉冲传递函数为的取值范围是系统的开环脉冲传递函数为的取值范围是已知,,。
符合系统描述的系统稳定系统稳定系统的闭环脉冲传递函数设离散系统如图所示,设,时,若要求其稳态误差,,该系统的闭环脉冲传递函数为该系统的开环脉冲传递函数为对于响应斜坡输入信号统(取F(z)=1),下列选项正确的是()变换为数字控制器的脉冲传递函数为变换为变换为非线性系统的及的轨迹如下图所示,以下说法正确的是求下图中以电压为输入量,以电感中的电流和电容上的电压作为状态变量的状态方程为___,以电阻上的电压作为输出量的输出方程为___。
()∙A.∙B.∙C.D.现用进行状态变换B.C.D.已知系统的传递函数为B. C.对线性系统作状态反馈 , A.某离散控制系统(单位反馈该系统稳态误差为代表时域中的延迟算子系统状态空间表达式中,若离散控制系统(单位反馈,则动态响应为的拉氏变换为,A.C.下图所示为某一闭环离散系统,则该系统的脉冲传递函数为()离散系统闭环脉冲传递函数的极点,的的拉氏变换为,则。
自动控制原理(胥布工)第二版引言自动控制是现代工程技术的重要组成部分,它广泛应用于工业生产、交通运输、电力系统、自动化设备等领域。
自动控制原理是理解和应用自动控制技术的基础,掌握自动控制原理可以帮助我们设计和优化控制系统,提高工作效率和质量。
本文档介绍了《自动控制原理(胥布工)第二版》的内容和主要特点,希望能帮助读者更好地理解自动控制原理,并应用于实际工程中。
内容概述《自动控制原理(胥布工)第二版》全书共分为八章,分别介绍了控制系统的基本概念、数学模型和信号流图、系统的稳定性和脉冲响应、系统的频率特性和频域分析、系统的校正和稳态误差、系统的动态性能和根轨迹分析、系统的校正与稳态误差、系统的稳态误差。
第一章是引言章节,主要介绍了自动控制的概念、发展历程以及控制系统的重要性。
第二章介绍了控制系统的数学模型和信号流图,为后续章节的讲解打下基础。
第三章是关于控制系统稳定性和脉冲响应的内容,介绍了系统的稳定性判据和脉冲响应的分析方法。
第四章介绍了系统的频率特性和频域分析,包括频率响应曲线的绘制和系统频率特性的分析方法。
第五章主要讲解了系统的校正和稳态误差,包括校正方法和稳态误差的计算。
第六章介绍了系统的动态性能和根轨迹分析,包括系统的快速响应性能和稳定性分析方法。
第七章介绍了系统的校正与稳态误差,重点介绍了系统校正的设计方法和稳态误差的计算。
第八章是关于系统的稳态误差的内容,介绍了不同类型系统的稳态误差分析方法和校正技术。
特点和亮点《自动控制原理(胥布工)第二版》具有以下特点和亮点:1.理论与实践结合:本书在讲解自动控制原理的基础理论的同时,注重实践应用。
通过大量的实际案例和实验分析,读者可以更好地理解控制原理的应用。
2.图文并茂:全书配有丰富的图例和实例,有助于读者理解和记忆控制原理的概念和方法。
3.编排合理:本书章节编排合理,内容连贯且层次清晰,从基本概念到实际应用,循序渐进,易于对知识的理解和掌握。
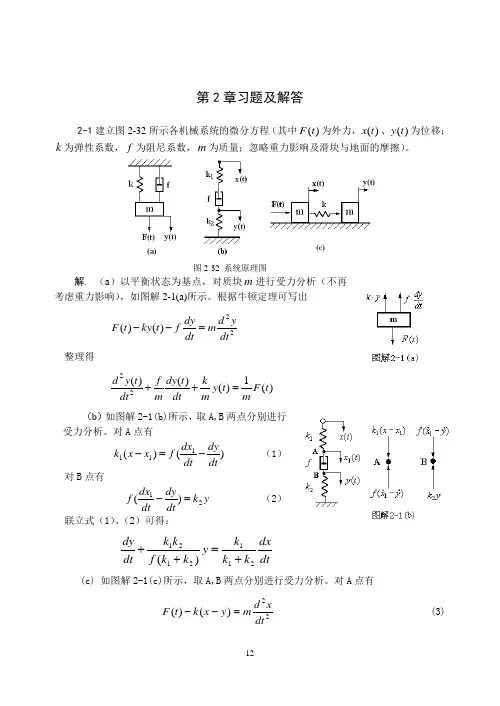
自动控制原理第二章课后习题答案(免费)离散系统作业注明:*为选做题2-1 试求下列函数的Z 变换 (1)()E z L =();n e t a = 解:01()[()]1k k k z E z L e t a z z z aa∞-=====--∑ (2) ();at e t e -= 解:12211()[()][]1...1atakT k aT aT aTaT k z E z L e t L ee z e z e z z e e z∞----------=====+++==--∑2-2 试求下列函数的终值:(1)112();(1)Tz E z z --=-解: 11111()(1)()1lim lim lim t z z Tz f t z E z z---→∞→→=-==∞- (2)2()(0.8)(0.1)z E z z z =--。
解:211(1)()(1)()0(0.8)(0.1)lim lim limt z z z z f t z E z z z →∞→→-=-==-- 2-3* 已知()(())E z L e t =,试证明下列关系成立:(1)[()][];n z L a e t E a =证明:0()()nn E z e nT z∞-==∑00()()()()[()]n n n n n n z z E e nT e nT a z L a e t a a ∞∞--=====∑∑ (2)()[()];dE z L te t TzT dz=-为采样周期。
证明:11100[()]()()()()()()()()()nn n n n n n n n n L te t nT e nT zTz ne nT z dE z de nT z dz dz e nT n zne nT z ∞∞---==∞-=∞∞----======-=-∑∑∑∑∑所以:()[()]dE z L te t Tzdz=- 2-4 试求下图闭环离散系统的脉冲传递函数()z Φ或输出z 变换()C z 。
第二章 习题解析2-4 当系统处于零初始条件下时,给系统输入单位阶跃响应信号,其输出响应为2()1t t y t e e --=-+试求该系统的传递函数。
参考解答:2111421()()21(2)(1)s s Y s R s s s s s s s s++=-+==++++ 22()42()()32Y s s s G s R s s s ++==++2-5 某可控硅整流器的输出电压d 2cos U KU αΦ=式中,K 为常数;2U Φ为整流变压器副边相电压有效值;α为可控硅的控制角。
设α在0α附近作微小变化,试将d U 与α的关系式线性化。
参考解答:将非线性微分方程d 2cos U KU αΦ=进行线性化,即在平衡点α0 附近将其展为泰勒级数取一次近似,线性化后用变量增量的线性方程ΔU d = C Δα 代替原来的非线性方程,式中常数2020sin sin dd dU C KU U KU d ααααααΦΦ===-→∆=-∆略去增加量符号“Δ”,上式可简写为20sin d U KU ααΦ=- 2-6 试求图2-70所示电路的传递函数()/()y r U s U s 。
参考解答:图 a)可作出该无源电路的动态结构图(图a-1)亦可作成图(图a-2)所示由结构图等效变换可求得传递函数212()11()()11c r U s R Cs bTs U s R R Cs Ts ++==+++式中21212(),1R T R R C b R R =+=<+ ,该网络称为滞后网络。
图 b)由图(b )网络可作出其动态结构图(b-1),简化为(b-2)即可得传递函数:112221122112212()(1)(1)()()1y r U s R C s R C s U s R C R C s R C R C R C s ++=++++该网络称为滞后-超前网络(滞后-超前电路)。
2-7 试求图2-71所示有源电路的传递函数y r ()/()U s U s 。