自动控制原理_第二版_薛安克_课后答案
- 格式:pdf
- 大小:1.96 MB
- 文档页数:23
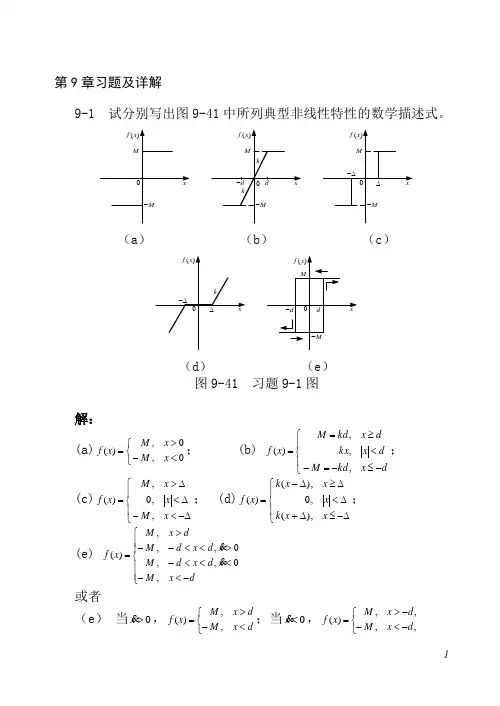
第9章习题及详解9-1 试分别写出图9-41中所列典型非线性特性的数学描述式。
(a )(b )(c )(d ) (e ) 图9-41 习题9-1图解: (a)⎩⎨⎧<->=0,0,)(x M x M x f ;(b) ⎪⎩⎪⎨⎧-≤-=-<≥==d x kd M d x kx d x kd M x f ,,,)(; (c)⎪⎩⎪⎨⎧∆-<-∆<∆>=x M x x M x f ,,0,)(;(d)⎪⎩⎪⎨⎧∆-≤∆+∆<∆≥∆-=x x k x x x k x f ,)(,0,)()(; (e) ⎪⎪⎩⎪⎪⎨⎧-<-<<<-><<-->=dx M xd x d M xd x d M dx M x f ,0,,0,,,)( 或者(e ) 当0>x,⎩⎨⎧<->=d x M d x M x f ,,)(;当0<x ,⎩⎨⎧-<-->=,,,,)(d x M d x M x f9-2 试用解析法求下列系统相轨迹方程的解。
(1)122=+x x(2)0sin =-+x x x解:(1)相变量方程为⎩⎨⎧-==221x x x x0))0(())0((32))0((21)(32)(212)12(3322003020020020=---+-=-+=-+=-+⎰⎰⎰⎰⎰⎰⎰⎰x x x x x x dx x d x d dx dx x x d x dx x x d xt t t t t t t t相轨迹方程的解为)0(6)0(4)0(36433232x x x x x x-+=-+ (2)相变量方程为 ⎩⎨⎧-==x x x x xsin0))0((21))0(cos (cos ))0((21)(21)(cos )(21)(sin 22220200200=-----=--=-+⎰⎰⎰⎰⎰x x x x x x x d x d x d x dx x x x d x t t t tt相轨迹方程的解为)0()0(cos 2)0(cos 22222x x x x x x--=--9-3 考虑系统02=+x x ω,其中,1<ω,试用解析法求该系统的相平面图。
自动控制原理(非自动化类)习题答案第一章习题被控量:水箱的实际水位 h c执行元件:通过电机控制进水阀门开度,控制进水流量。
比较计算元件:电位器。
h 「。
给定值为希望水位 h r (与电位器设定cr电压u r 相对应,此时电位器电刷位于中点位置)当h c h r 时,电位器电刷位于中点位置,电动机不工作。
一但h c h r 时,浮子位置相应升高(或CIc I降低),通过杠杆作用使电位器电刷从中点位置下移(或上移) ,从而给电动机提供一定的工作电压,驱动电动机通过减速器使阀门的开度减小(或增大),以使水箱水位达到希望值 h r 。
水位自动控制系统的职能方框图受控量:门的位置 测量比较元件:电位计工作原理:系统的被控对象为大门。
被控量为大门的实际位置。
输入量为希望的大门位置。
当合上开门开关时,桥式电位器测量电路产生偏差电压,经放大器放大后,驱动电动机带动绞盘转动,使大门向上提起。
同时,与大门连在一起的电位器电刷上移,直到桥式电位器达到平衡,电动机停转,开 门开关自动断开。
反之,当合上关门开关时,电动机带动绞盘反转,使大门关闭。
1-5 解:系统的输岀量:电炉炉温 给定输入量:加热器电压 被控对象:电炉1-1 (略) 1-2(略)1-3 解: 受控对象:水箱液面 测量元件:浮子,杠杆。
放大元件:放大器。
工作原理:系统的被控对象为水箱。
被控量为水箱的实际水位1-4 解:受控对象:门。
执行元件:电动机,绞盘。
放大 元件:放大器。
开闭门门实际仓库大门自动控制开(闭)的职能方框图放大元件:电压放大器,功率放大器,减速器比较元件:电位计测量元件:热电偶职能方框图:KK3 2 Ts (T 1)s s K1K 3电位器电压放大炉温热电偶第二章习题2-1解:对微分方程做拉氏变换:X,(s) R(s) C(s) N,(s)X 2 (s) Q X/s)X 3 (s) X2 (s) X5(s TsX4 (s) X 3 (s)X5 (s) X4 (s) K2 N2(s k 3 X5 (s) s2C (s) sC(s) C(s) / R(s) 功率放大加热器'电机电炉R(s)绘制上式各子方程的方块图如下图所示:C(s) / N i (s) C(s) / R(s),K 2K 3TSTs 3~~T 1)s 2s K 1K 32-2解:对微分方程做拉氏变换X i (s) K[R(s) C (s)] X 2 (s)sR(s)(s 1) X 3(s) X i (s) X 2 (s) (Ts 1)X 4 (s)X 3 (s) X 5 (s)C(s) X 4 (s) N (s) X 5 (s) (Ts 1) N(s)(b) C (s)字红R(s) 1 G 1G 3 G G 4 G 2 G 3 G 2G 4X3(s) 绘制上式各子方程的方块如下图:将方块图连接得出系统的动态结构图:..R(s)1(s 1):Ts 1)C(s)N (s) 02-3解:(过程略)K____________C(s) (s 1)<Js 1) (s 1XTs 1) K ____________ Ts 2(T s1)s (K 1)C(s) / N 2 (s)R(s) ms fs K(c)誤 R(s) G 2 G 1G 2 1 G-i G 2G-I (d 普 R(s)G 1 G 2 1 G 2G 3(e)R^ R(s)G 1G 2G 3G 4 1 G<|G 2 G 2G 3 G 3G 4 G 1G 2G 3G 4 2-4 解:(1)求 C/R ,令 N=0 KK K 3s(Ts 1) C (s) / R(s) G(s)1 G(s) 求C/N ,令R=0,向后移动单位反馈的比较点 K C(s) / N (s) (K n G n K 1 0 ) — J s 1 亠 K 1G(s)K 1K 2 K 3 Ts 2K i K 2 K 3K n K 3s K 1K 2 K 3G K 2 n2 一Ts 2s K 1K 2 K 3 Ts 1 s (2)要消除干扰对系统的影响C(s) / N (s) K n K3s K1K2 K3GnTs 2 s K 1K 2 K 3G n (s) KnsK 1K 22-5 解:(a ) (1 )系统的反馈回路有三个,所以有3L a L 1 L 2 L 3 a 1G 1G 2G 5 G 2G 3G 4 G 4G 2G 5三个回路两两接触,可得 1 L a 1 GG 2G 5 G 2G 3G 4 G 4G 2G 5(2) 有两条前向通道,且与两条回路均有接触,所以P P 2 G 1G 2G 3,11, 2 1(3) 闭环传递函数C/R 为GGG 3 11 G 1G 2G 5 G 2G 3G 4 G 4G 2G 5(b)(1) 系统的反馈回路有三个,所以有3L aa 1L 1L 3 G 1G 2 G 1 G 1三个回路均接触,可得 1 L a 1 G-i G 2 2G-)(2 )有四条前向通道,且与三条回路均有接触,所以R G 1G 2 , 11P 2G, 21PG2,3 1P 4G 1,41(3)闭环传递函数C/R 为C G 1G 2 G 1 G 2 GG-i G 2 G 2 R 1 G 1G 22G 1 1 G-|G 2 2G.2-6解:用梅逊公式求,有两个回路,且接触,可得1L a 1 GG 2G 3 G 2,可得第三章习题采用K 0 , K H 负反馈方法的闭环传递函数为1OK o要使过渡时间减小到原来的 0.1倍,要保证总的放大系数不变,则:(原放大系数为10,时间常数为0.2)3-2解:系统为欠阻尼二阶系统(书上改为“单位负反馈……”,“已知系统开环传递函数”)% e / 1 $100%100% 1C(s) G-|G 2G 3 G 2G 3 R(s) 1 G 1G 2G 3 G 2 C (s)(1 G 2 )G 3N 2 (s) 1 GG 2G 3 G 2 E(s) 1 G 2 G 2G 3 R(s) 1 G-|G 2G :3 G 2 E(s) C(s) (1 G 2 G N 2 (s)N 2 (s)1 G 1G 2G 3 G 2C (s) NQC(s) / R(s)C(s) 1 (1 GG 2G 3 G 2 ) 1N 3 (s) 1 G 1G 2G 3 G 2 E(s) C(s) G 2G 3 G 1G 2G 3 N 1 (s) N 1(s) 1 G 1G 2G 3 G 2E(s)C(s) 1N 3 (s)N 3 (s)3-1解:(原书改为G(s) 100.2s 1)(s)C(s) K G(s) R(s) 01 G(S )K H1 10K H 0.2s1 10K10K 。
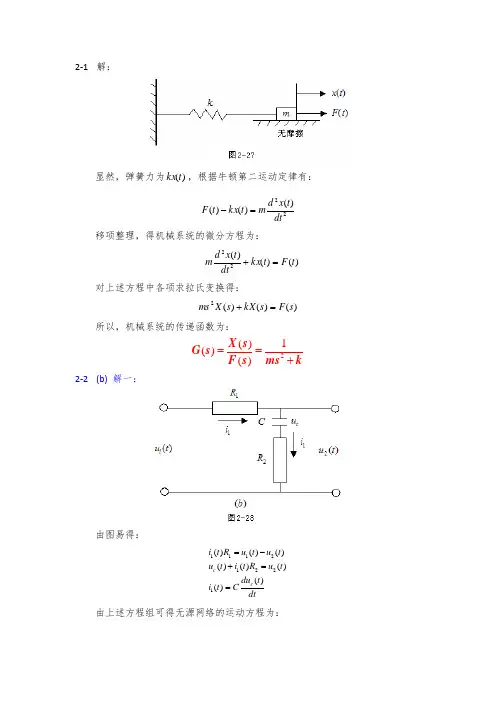
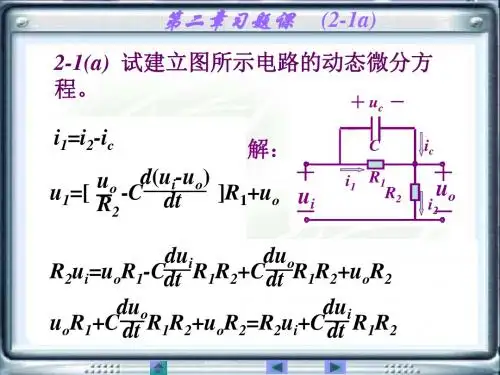
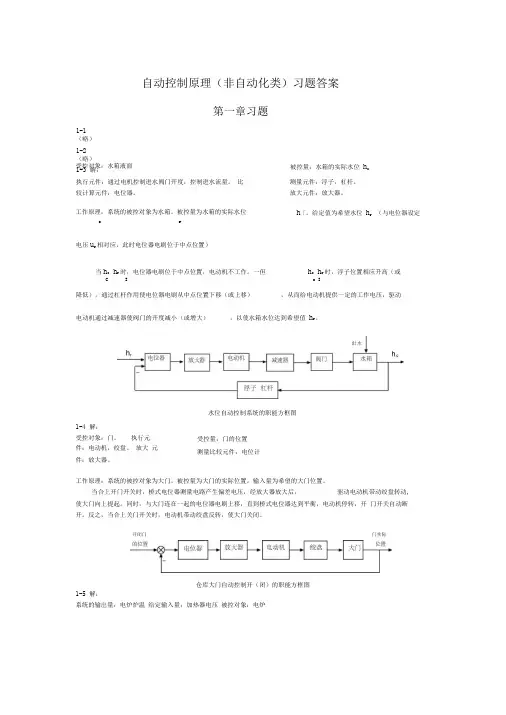
2-1 解:显然,弹簧力为)(t kx ,根据牛顿第二运动定律有:22)()()(dtt x d m t kx t F =- 移项整理,得机械系统的微分方程为:)()()(22t F t kx dt t x d m =+对上述方程中各项求拉氏变换得:)()()(2s F s kX s X ms =+所以,机械系统的传递函数为:2()1()()X s G s F s ms k==+ 2-2 (b) 解一:由图易得:11121221()()()()()()()()c c i t R u t u t u t i t R u t du t i t Cdt=-+== 由上述方程组可得无源网络的运动方程为:2112221()()()()()++=+du t du t C R R u t CR u t dt dt对上述方程中各项求拉氏变换得:1222211()()()()()C R R sU s U s CR sU s U s ++=+所以,无源网络的传递函数为:22112()1()()1()U s CR sG s U s C R R s+==++ 解二(运算阻抗法或复阻抗法):222112121()11()1()++==++++R U s R Cs Cs U s R R CsR R Cs(c) 解一:设总电流为i 1(t ),R 2中的电流为i 2(t ),则由基尔霍夫定律,有12112122222()()()()()()()()()-==-+=u t u t i t R du t Ci t i t dt di t L R i t u t dt消去中间变量i 1(t )和i 2(t ),得22221222121111()()()()(1)()()++++=+d u t du t R du t R L L LC R C u t u t R dt R R dt R dt 对上式进行拉氏变换可得222111212()()()()()+==++++U s Ls R G s U s R LCs R R C L s R R 解二:(运算阻抗法或复阻抗法):222221112122121()1()()1()()()()1()++++==++++++++R Ls CsR Ls U s Ls R Cs U s R LCs R R C L s R R R Ls Cs R R Ls Cs2-5 解:按照上述方程的顺序,从输出量开始绘制系统的结构图,其绘制结果如下图所示:依次消掉上述方程中的中间变量,,,321X X X 可得系统传递函数为:)]()()[()()()()()()()()()(1)()()()()()(8743215436324321s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s R s C -+++=(也可由结构图化简方法,求得上述传递函数)2-6 解:① 将)(1s G 与)(1s G 组成的并联环节和)(1s G 与)(1s G 组成的并联环节简化,它们的等效传递函数和简化结构图为:)()()()()()(43342112s G s G s G s G s G s G -=+=② 将)(),(3412s G s G 组成的反馈回路简化便求得系统的闭环传递函数为:121121223434()()1[()()()(1()()][()())(])G s C s R s G G s G s G s G s G s G s G s s ++-==++ 2-7 (a )解:由上图可列方程组:)()()()()()()()]()()()([21221s E s G s C s H s R s C s G s H s C s G s E =-=-联列上述两个方程,消掉)(s E ,得传递函数为:121122()()()()1()()()()G s G s C s R s H s G s H s G s =++ 联列上述两个方程,消掉)(s C ,得传递函数为:2211221()()()()1()()()()H s G s E s R s H s G s H s G s +=++2-8 解:将①反馈回路简化,其等效传递函数和简化图为:351125.0*4.01124.0)(1+=+++=s s s s G将②反馈回路简化,其等效传递函数和简化图为:4.39.55.4535)35)(13.0(4.0113.01)(23222++++=++++++=s s s s s s s s s s G将③反馈回路简化便求得系统的闭环传递函数为:3232320.7*(53)()5 4.5 5.9 3.40.7*(53)()15 4.5 5.93 3.5 2.15(4.5 3.5)(5..9 2.1)34.4o i s s s s s s Ks s s s s s K s K s s +Θ+++==+Θ++++++++++2-9 (a )一个前向通道 P 1=G 1G 2, Δ1=1 两个回路 L 1=-G 1H 1,L 2=-G 2H 2 所以1211221=++G G P G H G H(b )两个前向通道 P 1=G 1G 2, Δ1=1P 2=G 3G 2 Δ2=1一个回路 L 1=-G 1G 2H 1 所以213121()1=++G P G G G G H3-1 解:设系统开环传递函数为()G s ,则有 ()()()()()()()1()C s G s R s G s C s G s R s C s =⇒=-+ 因为 ()1()r t t t =+;5()0.80.8t c t t e -=-+ 所以22111()s R s s s s+=+=;2210.80.855()5(5)s C s s s s s s +=-+=++ 因此255()+=+s G s s s 5?s=3-3 解:该二阶系统的最大超调量:%100*21/ζζπσ--=ep当%5=p σ时,可解上述方程得:69.0=ζ当%5=p σ时,该二阶系统的过渡时间为:3(5%)s n t ζω≈∆=或4(2%)s nt ζω≈∆=所以,该二阶系统的无阻尼自振角频率33 2.170.69*2n s t ωζ≈==或442.90.69*2n s t ωζ≈==3-4 解:由上图可得系统的传递函数:10)51(*2)1(*10)2()1(*101)2()1(*10)()(2++++==+++++=s K s Ks s s Ks s s Ks s R s C所以n ω15d n K ζω=+ ⑴ 若0.5d ζ=时,10.15162=≈K 所以0.1162K ≈时,0.5d ζ=⑵加入)1(Ks +相当于加入了一个比例-微分环节,将使系统的阻尼比增大,可以有效地减小原系统的阶跃响应的超调量;同时由于微分的作用,使系统阶跃响应的速度(即变化率)提高了,从而缩短了过渡时间:总之,加入比例-微分)1(Ks +环节后,系统响应性能得到改善。
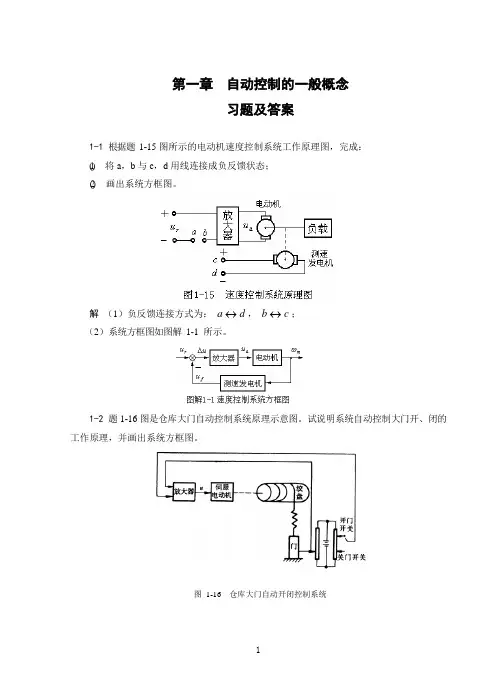
第一章绪论1-1 试比较开环控制系统和闭环控制系统的优弊端.解答: 1 开环系统(1)长处 :构造简单,成本低,工作稳固。
用于系统输入信号及扰动作用能早先知道时,可获得满意的成效。
(2)弊端:不可以自动调理被控量的偏差。
所以系统元器件参数变化,外来未知扰动存在时,控制精度差。
2闭环系统⑴长处:不论因为扰乱或因为系统自己构造参数变化所惹起的被控量偏离给定值,都会产生控制作用去消除此偏差,所以控制精度较高。
它是一种按偏差调理的控制系统。
在实质中应用宽泛。
⑵弊端:主要弊端是被控量可能出现颠簸,严重时系统没法工作。
1-2什么叫反应?为何闭环控制系统常采纳负反应?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反应。
闭环控制系统常采纳负反应。
由1-1 中的描绘的闭环系统的长处所证明。
比如,一个温度控制系统经过热电阻(或热电偶)检测出目前炉子的温度,再与温度值对比较,去控制加热系统,以达到设定值。
1-3试判断以下微分方程所描绘的系统属于何种种类(线性,非线性,定常,时变)?2 d 2 y(t)3 dy(t ) 4y(t ) 5 du (t ) 6u(t )(1)dt 2 dt dt(2) y(t ) 2 u(t)(3)t dy(t) 2 y(t) 4 du(t) u(t ) dt dtdy (t )u(t )sin t2 y(t )(4)dtd 2 y(t)y(t )dy (t ) (5)dt 2 2 y(t ) 3u(t )dt(6)dy (t ) y 2 (t) 2u(t ) dty(t ) 2u(t ) 3du (t )5 u(t) dt(7)dt解答: (1)线性定常(2)非线性定常 (3)线性时变(4)线性时变(5)非线性定常(6)非线性定常(7)线性定常1-4 如图 1-4 是水位自动控制系统的表示图, 图中 Q1,Q2 分别为进水流量和出水流量。
控制的目的是保持水位为必定的高度。
电位器放大器电动机减速器阀门水箱浮子杠杆 _ 电位器放大器电动机绞盘位置大门 _ 1 1-5 解系统的输出量电炉炉温给定输入量加热器电压被控对象电炉仓库大门自动控制开(闭)的职能方框图门实际开(闭)门的位置工作原理系统的被控对象为大门。
被控量为大门的实际位置。
输入量为希望的大门位置。
当合上开门开关时,桥式电位器测量电路产生偏差电压,经放大器放大后,驱动电动机带动绞盘转动,使大门向上提起。
同时,与大门连在一起的电位器电刷上移,直到桥式电位器达到平衡,电动机停转,开门开关自动断开。
反之,当合上关门开关时,电动机带动绞盘反转,使大门关闭。
受控量门的位置测量比较元件电位计 1-4 解受控对象门。
执行元件电动机,绞盘。
放大元件放大器。
水位自动控制系统的职能方框图 h c hr 出水电动机通过减速器使阀门的开度减小(或增大),以使水箱水位达到希望值 hr 。
当 hc=hr 时,电位器电刷位于中点位置,电动机不工作。
一但 hc ≠ hr 时,浮子位置相应升高(或降低),通过杠杆作用使电位器电刷从中点位置下移(或上移),从而给电动机提供一定的工作电压,驱动电压 ur 相对应,此时电位器电刷位于中点位置)。
r c (与电位器设定工作原理系统的被控对象为水箱。
被控量为水箱的实际水位 h 。
给定值为希望水位 h 测量元件浮子,杠杆。
放大元件放大器。
执行元件通过电机控制进水阀门开度,控制进水流量。
比较计算元件电位器。
c 被控量水箱的实际水位 h 受控对象水箱液面。
1-1(略) 1-2(略) 1-3 解习题第一章自动控制原理(非自动化类)习题答案电位器电压放大功率放大电机加热器电炉热电偶 K1 K2 1 s 2 + s 1 Ts K3 K2 1 Ts 1 s2 + s K1 K3 - - 2 1 3 Ts3 + (T + 1)s2 + s + K K , C (s) / R(s)=K1K3 X5(s) X4(s) X3(s) X2(s) R(s) C(s) _ N1(s) +X1(s) N2(s) 将方块图连接起来,得出系统的动态结构图X5(s) - X4(s) C(s) X5(s) X4(s) X3(s) N2(s) X5(s) C(s) - - X2(s) X1(s) X3(s) X2(s)X1(s) + R(s) 3 5 绘制上式各子方程的方块图如下图所示N1(s) K X (s)=s2C (s) + sC (s) X 5 (s)=X 4 (s) K2 N2 (s) TsX 4 (s)=X 3 (s)X 2 (s)=K1 X1 (s) X 3 (s)=X 2 (s) X 5 (s) 2-1 解对微分方程做拉氏变换X1 (s)=R(s) C (s) + N1 (s) 习题第二章—炉温给定炉温放大元件电压放大器,功率放大器,减速器比较元件电位计测量元件热电偶职能方框图1 s + 1 K s τ 1 Ts + 1 s T Ts+1 τs 1 s + 1 1 Ts + 1 K - 3 1 31 423 24 (b) R(s) 1 + G G G G + G G G G (a)=R(s) ms2 + fs + K G1+ G2 C (s)=1 C(s) 2-3 解(过程略) N (s)=C (s) (s + 1)(Ts + 1) 1 + Ts2 + (T + 1)s+ (K + 1) k R(s) C (s)=(s + 1)(Ts + 1) (s + 1)(Ts + 1)=K + s + K s X4(s) X3(s) X1(s)R(s) — C(s) X5(s) X2(s) N(s) 将方块图连接得出系统的动态结构图C(s) X4(s) X4(s) X3(s) — X5(s) N(s) N(s) X5(s) C(s) - X3(s) X1(s) X2(s) R(s)X1(s) R(s) X2(s) X 5 (s)=(Ts + 1) N (s) 绘制上式各子方程的方块如下图C (s)=X (s) N (s) 4 (Ts + 1) X 4 (s)=X 3 (s) + X 5 (s) X 2 (s)= sR(s) (s +1) X 3 (s)=X1 (s) + X 2 (s) 2-2 解对微分方程做拉氏变换 X1 (s)=K[R(s) C (s)] 1 3 Ts3 + (T + 1)s2 + s + K K 2 C (s) / N (s)= K2 K3Ts C (s) / N1 (s)=C (s) / R(s) ,三个回路均接触,可得 =1 ∑ La=1 + G1G2 + 2G1 4 ∑ La=L1 + L2 + L3=G1G2 G1 G1a=1 3 (b)(1)系统的反馈回路有三个,所以有 R 1 + G1G2G5 + G2G3G4 G4G2G5 G1G2G3+ 1 C=三个回路两两接触,可得 =1 ∑ La=1 + G1G2G5 + G2G3G4 G4G2G5 (2)有两条前向通道,且与两条回路均有接触,所以 P1=G1G2G3 , 1=1 P2=1, 2=1 (3)闭环传递函数 C/R为∑ La=L1 + L2 + L3=G1G2G5 G2G3G4 + G4G2G5 a=1 3 2-5 解(a)(1)系统的反馈回路有三个,所以有 K1K2 n G (s)=Kn s 1 2 3 Ts2 + s + K K K (2)要消除干扰对系统的影响 C (s) / N (s)=K n K3 s K1K2 K3Gn= Ts + 1 s 1 1 2 3 K 2 3 1+ s Ts2 + s + K K K K K n n 1 C (s) / N (s)=(K G K K3 K2 ) Ts + 1=K n K3 sK1K2 K3Gn 求 C/N,令 R=,向后移动单位反馈的比较点 1 2 3 1 + G(s) Ts2 + s +K K K=C (s) / R(s)=G(s) K1K2 K3 s(Ts + 1) 2-4 解(1)求 C/R,令 N= G(s)=K1K2 K3R(s) 1 + G1G2 + G2G3 + G3G4 + G1G2G3G4 (e) G1G2G3G4 C (s)=R(s) 1 G2G3 R(s) 1 + G1+ G2G1 (d) (c) C(s)=G1 G2 C(s)=G2 + G1G2 5 n ù 1 2=.1 t p=e 1 3-2 解系统为欠阻尼二阶系统(书上改为“单位负反馈……”,“已知系统开环传递函数”)ó %=ee / 1 ×1%=3 1 ×1% 2 H 1 + 1K=1 H K=.9 H 1 + 1K =1 K=11K 要使过渡时间减小到原来的 .1 倍,要保证总的放大系数不变,则(原放大系数为 1,时间常数为 .2) 1 + 1KH H s + 1 .2 R(s) 1 + G(s)K=1 + 1K H G(s) (s)=C (s)=K 1K 采用 K , K H 负反馈方法的闭环传递函数为 .2s + 1 ) 3-1 解(原书改为 G(s)=1 习题第三章 N3 (s) N3 (s) N2 (s) N2 (s) 1 + G1G2G3 + G2=1=E(s)= C (s) (1 + G2 )G3 E (s)=C (s) N1 (s) N1 (s) 1 + G1G2G3 + G2 R(s) 1 + G1G2G3 + G2 E(s)= C (s)=G2G3 G1G2G3E(s)=1 + G2 G2G3 N3 (s) 1 + G1G2G3 + G2 N2 (s) 1 + G1G2G3 + G2=C (s) C (s)=1× (1+ G1G2G3 + G2 )=1 (1 + G2 )G3 N1 (s) R(s) 1 + G1G2G3 + G2=C (s) / R(s) C (s) C (s)=G1G2G3+ G2G3 2-6 解用梅逊公式求,有两个回路,且接触,可得 =1 ∑ La=1 + G1G2G3 + G2 ,可得 1 + G1G2 + 2G1 1 + G1G2 + 2G1 R G1G2 + G2 C=G1G2 + G1 + G2 G1=(2)有四条前向通道,且与三条回路均有接触,所以 P1=G1G2 , 1=1 P2=G1 , 2=1 P3=G2 , 3=1 P4=G1 , 4=1 (3)闭环传递函数 C/R 为 6 n c. =.1,ù=1s1 时, n ù s=5s t=5 2 ó %=ee / 1 ×1%=78% n b. =.1,ù=1s1 时, n ù s=7s t=5 2 ó %=ee / 1 ×1%=78% n a. =.1,ù=5s1 时, n 2ùn=1 解得ùn=114, =.354, ó %=3%, t p=.238 结论,K 增大,超调增加,峰值时间减小。
《自动控制原理》(第2版)习题答案1第2章2-1 (1)t e t ett23sin 3123cos122--+- (2)6 + 3t(3))334(322+++---t t e e t t (4)t t ωωωsin 1132-2-2 (1)2351853tt e e --+-(2)t e 2-(3)t e a b t ae n t nnn t n n ωωζωωζωζωsin cos --++(4)t a Aa t a A e b a A atωωωωωωωsin cos 222222++++⎪⎭⎫ ⎝⎛++- 2-3 (a ))()()(2110f f ms f s X s X i ++=(b )212110)()()(k k s k k f fsk s X s X i ++=2-4 (a ))()()(t u t kx t xm =+ (b ))()()(2121t u t x k k k k t x m =++ 2-5 (a ))()()()()(2212121t u R dt t du C R R t u R R dt t du CR R r r c c +=++ (b ))()()()()()(22121221t u R t u R R dt t du C R R L dt t u d LC R r c c c =++++ 2-6 252312)14(100)()(2+++=s s s s R s C 2523125231210)()(22++++⋅=s s s s s R s E 2-7 t t e e t c 2241)(--+-= 2-8 )1)(2(23)(+++=s s s s G t t e e t h ---=24)(22-9 (a )1)(1)()(32213+++⋅-=s R R C s CR R R s U s U r c (b )13221)()()(R R R s R CR s U s U r c ++-= 2-10 (a )))((1)()(432121G G G G G G s R s C -+++=(b ))(1)1()()(21221H H G G G s R s C -++=(c )331311321332123113211)()(H G H G H G G G G H G G H G G H G G G G s R s C ++++++=2-11 (a )32211)()(G G G G s R s C ++=(b )H G H H G s R s C 111)1()()(+--=(c )121223121)()()(H G G H G G G G s R s C +++=2-12 (a )))((1)1()()(23111232123111134321H G H G H H G G G H G H G H G G G G G G s R s C --++++++=))((1)1(1)()(2311123212311123423H G H G H H G G G H G H G H H G G H G s R s E --++++-+⋅=(b )21212121312)()(G G G G G G G G s R s C ++-++-= 21212131)1(1)()(G G G G G G s R s E ++-+⋅=2-13 (a )12121211)()(H G G G G G G s R s C ++= 121211211)1(1)()(H G G G G H G G s R s E +++⋅=12121231211)1(1)()(H G G G G G G H G G s D s C ++++⋅-=12121231211)1(1)()(H G G G G G G H G G s D s E ++-+⋅= (b )434242143421)()(G G G G G G G G G G G s R s C ++++= 434242111)()(G G G G G G G s R s E ++-=434241)()(G G G G G s D s C ++= 434241)()(G G G G G s D s E ++-=32-14 (a )))((1)(23113343321231134321H G H G H G G H G G G H G H G G G G G G s G -+++-++=(b )3541432326543211)(H G G H G G H G G G G G G G G s G +-+=(c ) 15.1 (d )))((1)1()(ch af ehgf ch gb af gb ed abcd s G +----++=45σ % = 56.2% t p = 1.006 t s = 63-13 0 < K < 0.75 3-14 (1)0(2)1 3-16 (1)∞ ∞6分离点:d = -0.8857(4) 渐近线:σa = -1 ϕa = ± 60︒,180︒与虚轴的交点:K = 3 s = ± j1.414分离点:d = -0.423 根迹图略(5) 渐近线:σa = -2/3 ϕa = ± 60︒,180︒与虚轴的交点:K = 4 s = ± j1.414(6)渐近线:σa = -1.5 ϕa = ± 45︒,± 135︒起始角:ϕ1 = -63.4︒根迹图略 (7)(8)894-9 零度根轨迹。
自动控制原理第二版课后习题参考答案2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-2 (a)()()RCs RCs s U s U 112+=(b) ()()141112+⋅-=Cs R R R s U s U (c)()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602 2-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i 2-8 (a)()()()()3113211G H G G G G s R s C +++=(b)()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12 (a)()()()adgi abcdi agdef abcdef cdhs R s C +++-=11(b)()()()1221211222112++++=s C R C R C R s C R C R R s R s C 2-13 由选加原理,可得()()()()()()[]s D H G G s D G s D G s R G G G H G H s C 3121221221221111--+++=第三章3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时设系统为单位反馈系统,有()()()()()2222nn n r s s s s R s c s R s E ωζωζω+++=-= 系统对单位斜坡输入的稳态误差为 ()nn n n s sr s s s s s s im e ωζωζωζω22212220=+++⋅⋅=→ 3-2 (1) 0,0,50===a v p K K K (2) 0,,==∞=a v p K K K K(3) 10,,K K K K a v p =∞=∞= (4) 0,200,==∞=a v p K KK K 3-3 首先求系统的给定误差传递函数()⎪⎭⎫ ⎝⎛++-=-=-t e t t c s n t n n nn 21222,1ωωωωω()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()0)101.0()12.0(20)101.0(2lim lim 1.0)101.0()12.0(10lim lim 0101.0)11.0(lim lim 32220220222001200=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s e s s e s(1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r s s s ,于是稳态误差级数为()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r s s s ,于是稳态误差级数为()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t rt R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s = ,于是稳态误差级数为())(1.0)(!2)()(21210t R R t r C t rC t r C t e s s s sr +=++= ,0≥t 3-4 首先求系统的给定误差传递函数()5001.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()232220220222001200050098)5001.0()12.0(1000)5001.0(100lim lim 5001)5001.0()12.0(500lim lim 05001.0)11.0(lim lim =+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s es s e stt r t t rt t r s s s 5sin 25)(5cos 5)(5sin )(-===稳态误差级数为()[][][]tt tC t C C t e sr 5cos 1015sin 109.45cos 55sin 25224120 -⨯++⨯=-⨯+⎥⎦⎤⎢⎣⎡+⨯-=- 3-5 按技术条件(1)~(4)确定的二阶系统极点在s 平面上的区域如图A-3-1 (a) ~ (d)的阴影区域。