自动控制原理课后答案2 西工大版
- 格式:pdf
- 大小:502.00 KB
- 文档页数:22
第1章习题答案1-1 解:自动控制系统:被控对象和控制装置的总体;被控对象:要求实现自动控制的机器、设备和生产过程;扰动:除给定值之外,引起被控制量变化的各种外界因素;给定值:作用于控制系统输入端,并作为控制依据的物理量;反馈:将输出量直接或间接的送到输入端,并与之相比较,使系统按其差值进行调节,使偏差减小或消除。
1-2 解:开环控制有洗衣机的洗衣过程,闭环控制有抽水马桶的蓄水控制、电冰箱制冷系统等。
1-3 解:1-4 解:a与d相连,b与c相连即可;系统原理框图如下所示:1-5 解:系统原理框图如下所示:1-6 解:对控制系统的基本要求是稳定性、准确性和快速性:稳定性是系统正常工作的前提条件;准确性反映控制系统的控制精度,要求过渡过程结束后,系统的稳态误差越小越好;快速性是要求系统的响应速度快,过渡过程时间短,超调量小。
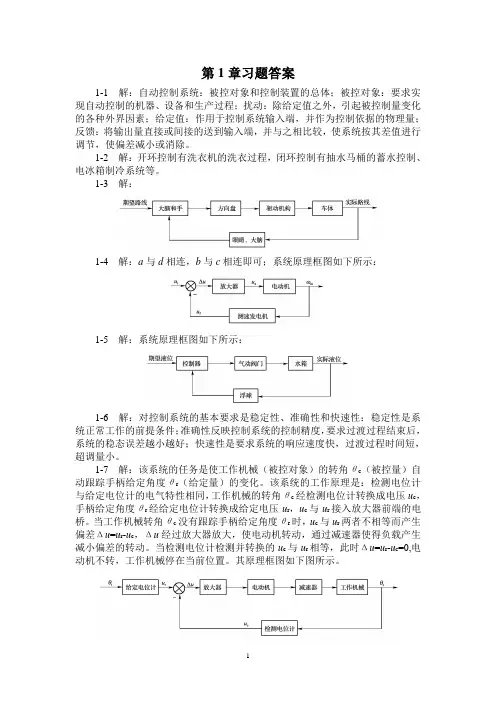
1-7 解:该系统的任务是使工作机械(被控对象)的转角θc(被控量)自动跟踪手柄给定角度θr(给定量)的变化。
该系统的工作原理是:检测电位计与给定电位计的电气特性相同,工作机械的转角θc经检测电位计转换成电压u c,手柄给定角度θr经给定电位计转换成给定电压u r,u c与u r接入放大器前端的电桥。
当工作机械转角θc没有跟踪手柄给定角度θr时,u c与u r两者不相等而产生偏差Δu=u r-u c,Δu经过放大器放大,使电动机转动,通过减速器使得负载产生减小偏差的转动。
当检测电位计检测并转换的u c与u r相等,此时Δu=u r-u c=0,电动机不转,工作机械停在当前位置。
其原理框图如下图所示。
1-8 解:谷物湿度控制系统原理框图如下。
该系统的被控量是谷物湿度,给定量是希望的谷物湿度。
谷物加湿后的实时湿度经湿度检测后送到调节器,若与希望的湿度产生偏差,则通过调节器控制给水阀门的开大或关小,以减小两者的偏差。
谷物在入口端的湿度由前馈通道输入到调节器。
这样若入口处谷物湿度较大,则会使得偏差减小,从而减小阀门的开度;若谷物干燥,会增大偏差,从而加大阀门的开度。
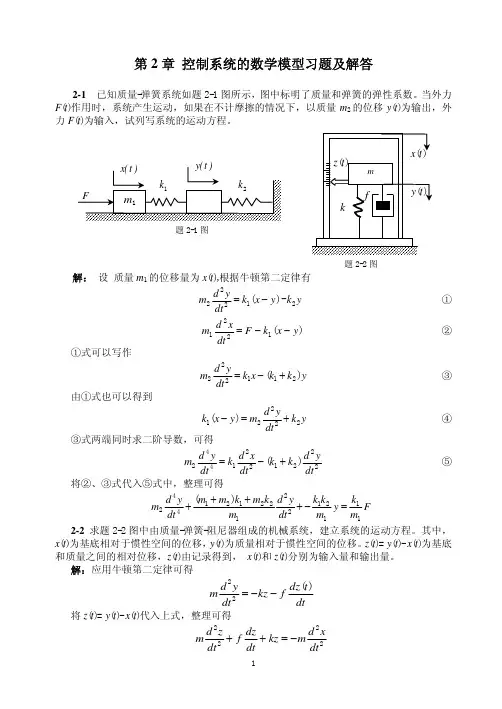
第2章 控制系统的数学模型习题及解答2-1 已知质量-弹簧系统如题2-1图所示,图中标明了质量和弹簧的弹性系数。
当外力F (t )作用时,系统产生运动,如果在不计摩擦的情况下,以质量m 2的位移y (t )为输出,外力F (t )为输入,试列写系统的运动方程。
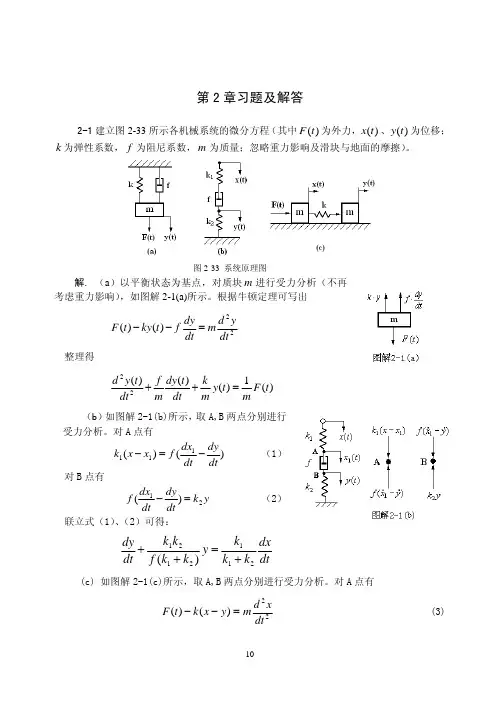
解: 设 质量m 1的位移量为x (t ),根据牛顿第二定律有y k y x k dt yd m 21222-)(−= ①)(1221y x k F dtxd m −−= ②①式可以写作y k k x k dtyd m )(211222+−= ③由①式也可以得到y k dtyd m y x k 22221)(+=− ④③式两端同时求二阶导数,可得2221221442)(dty d k k dt x d k dt yd m +−= ⑤将②、③式代入⑤式中,整理可得F m k y m k k dty d m k m k m m dt y d m 1112122122121442)(=−++++ 2-2 求题2-2图中由质量-弹簧-阻尼器组成的机械系统,建立系统的运动方程。
其中,x (t )为基底相对于惯性空间的位移,y (t )为质量相对于惯性空间的位移。
z (t )= y (t )- x (t )为基底和质量之间的相对位移,z (t )由记录得到, x (t )和z (t )分别为输入量和输出量。
解:应用牛顿第二定律可得dtt dz f kz dt y d m )(22−−= 将z (t )= y (t )- x (t )代入上式,整理可得2222dtx d m kz dt dz f dt z d m −=++题2-2图题2-1图解:(a )引入中间变量u c (t)表示电容器两端的电压。
根据基尔霍夫电流定律有o c c u R u R dt du C2111=+ 根据基尔霍夫电压定律有o i c u u u −=联立消去中间变量,可得描述输入量u i (t )和输出量u o (t )之间关系的微分方程为i i o o u R dt du C u R R R R dt du C121211+=++ (b )引入回路电流i (t )和电容器两端的电压u c (t)作为中间变量,根据基尔霍夫电压定律有i o u u i R =+1 另有电容元件的元件约束关系方程dtdu Ci c =和i R u u o c 2−=联立求解,消去中间变量可得i i o o u R dt du C u R R R R dt du C121211+=++(c )设电容器C 2两端的电压为u c 2(t),根据基尔霍夫电流定律有dtduC u u R dt u u d C c o i o i 2211)(1)(=−+− ①求导可得22221221)(1)(dtu d C dt u u d R dt u u d C c o i o i =−+− ② 另有输出支路电压方程o c c u u dtdu C R =+2222 等式两边求导有dtdu dt du dt u d C R oc c =+222222 ③将①、②代入③式,整理可得i ii ooo u C R dt du C R C R C R dt u d C R u C R dt du C R C R C R C R dt u d C R 2121221121221212122112121122+++=++++2-4 试求题2-4图所示有源RC 电路的微分方程,其中u i (t )为输入量,u o (t )为输出量。
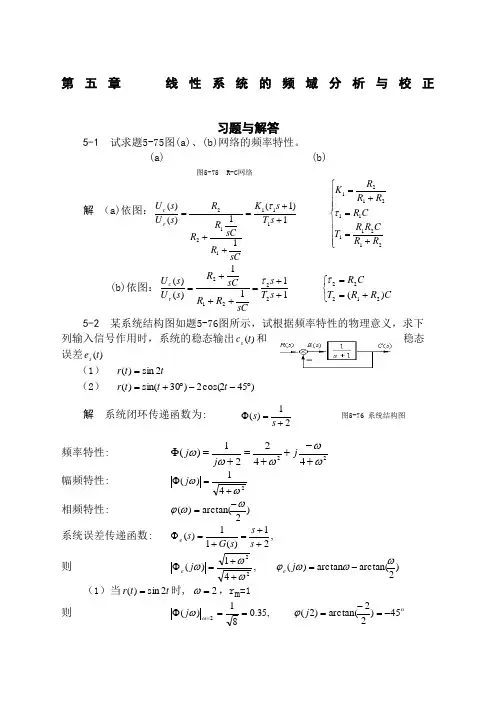
第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sC R sC R R R s U s U r c ττ (b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c)(1111)()(2122222212ττ 5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s(1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1 则 ,35.081)(2==Φ=ωωj ο45)22arctan()2(-=-=j ϕ(2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5-3 若系统单位阶跃响应 试求系统频率特性。
解 ss R s s s s s ss C 1)(,)9)(4(3698.048.11)(=++=+++-= 则 )9)(4(36)()()(++=Φ=s s s s R s C 频率特性为 )9)(4(36)(++=Φωωωj j j5-4 绘制下列传递函数的幅相曲线:解 ()()()12G j K j K e j ==-+ωωπ幅频特性如图解5-4(a)。
自动控制原理卢京潮主编课后习题答案西北工业大学出版社SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sC R sC R R R s U s U r c ττ (b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c)(1111)()(2122222212ττ 5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s(1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ (2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5-3 若系统单位阶跃响应 试求系统频率特性。

自动控制原理第二章到第七章课后习题答案第二章2-1试求下图所示电路的微分方程和传递函数。
解:(a )根据电路定律,列写出方程组:001Li R c L R C di L u u dtu R i i dt Ci i i ⋅+==⋅==+⎰消除中间变量可得微分方程:20002i d u du L L C u u dt R dt⋅⋅+⋅+=对上式两边取拉氏变换得:2000()()()()i LL C U s s U s s U s U s R⋅⋅⋅+⋅⋅+= 传递函数为022()1()()1i U s R G s L U s R Ls LCRs s LCs R ===++++ (b )根据电路定律,列写出方程组:12011()i i u i R R idt C u u i R =++-=⎰消除中间变量可得微分方程:121012i R R Ru u idt R R C+=-⎰ 对上式两边取拉氏变换得:2012()(1)()(1)i U s R Cs U s R Cs R Cs +=++传递函数为0212()1()()1i U s R CsG s U s R Cs R Cs+==++2-3求下图所示运算放大器构成的电路的传递函数。
解:(a )由图(a ),利用等效复数阻抗的方法得22111(s)1(s)()1o i R U R Cs Cs G U s R R Cs ++==-=-+(b )由图(b ),利用等效复数阻抗的方法得222121211221211111(s)()1(s)1()1o i R U C s R R C C s R C R C s G U s R C s R C s R C s++++==-=-+2-5试简化下图中各系统结构图,并求传递函数()()C s R s 。
2-6试求下图所示系统的传递函数11()()C s R s ,21()()C s R s ,12()()C s R s 及22()()C s R s 。
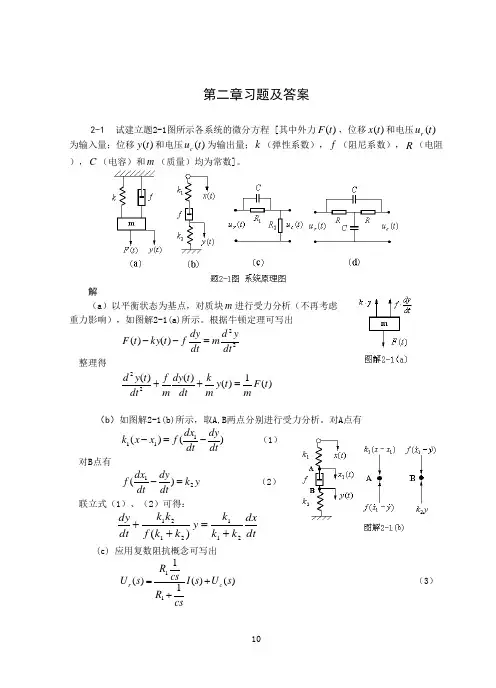
第二章习题及答案2-1 试建立题2-1图所示各系统的微分方程 [其中外力)(t F ,位移)(t x 和电压)(t u r 为输入量;位移)(t y 和电压)(t u c 为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数]。
解(a )以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解2-1(a)所示。
根据牛顿定理可写出22)()(dty d m dt dy f t ky t F =-- 整理得)(1)()()(22t F m t y m k dt t dy m f dtt y d =++(b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有 )()(111dtdydt dx f x x k -=- (1) 对B 点有 y k dtdydt dx f 21)(=- (2) 联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++ (c) 应用复数阻抗概念可写出)()(11)(11s U s I csR cs R s U c r ++= (3)2)()(R s Uc s I =(4) 联立式(3)、(4),可解得: CsR R R R Cs R R s U s U r c 212112)1()()(+++=微分方程为: r r c c u CR dt du u R CR R R dt du 121211+=++(d) 由图解2-1(d )可写出[]Css I s I s I R s U c R R r 1)()()()(++= (5) )()(1)(s RI s RI Css I c R c -= (6) []Css I s I R s I s U c R c c 1)()()()(++= (7)联立式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c 微分方程为 r r r c c c u RC dt du CR dt du u R C dt du CR dt du 222222221213++=++2-2 试证明题2-2图中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。

自动控制原理第二章课后习题答案(免费)离散系统作业注明:*为选做题2-1 试求下列函数的Z 变换 (1)()E z L =();n e t a = 解:01()[()]1k k k z E z L e t a z z z aa∞-=====--∑ (2) ();at e t e -= 解:12211()[()][]1...1atakT k aT aT aTaT k z E z L e t L ee z e z e z z e e z∞----------=====+++==--∑2-2 试求下列函数的终值:(1)112();(1)Tz E z z --=-解: 11111()(1)()1lim lim lim t z z Tz f t z E z z---→∞→→=-==∞- (2)2()(0.8)(0.1)z E z z z =--。
解:211(1)()(1)()0(0.8)(0.1)lim lim limt z z z z f t z E z z z →∞→→-=-==-- 2-3* 已知()(())E z L e t =,试证明下列关系成立:(1)[()][];n z L a e t E a =证明:0()()nn E z e nT z∞-==∑00()()()()[()]n n n n n n z z E e nT e nT a z L a e t a a ∞∞--=====∑∑ (2)()[()];dE z L te t TzT dz=-为采样周期。
证明:11100[()]()()()()()()()()()nn n n n n n n n n L te t nT e nT zTz ne nT z dE z de nT z dz dz e nT n zne nT z ∞∞---==∞-=∞∞----======-=-∑∑∑∑∑所以:()[()]dE z L te t Tzdz=- 2-4 试求下图闭环离散系统的脉冲传递函数()z Φ或输出z 变换()C z 。
西工大821自动控制原理第二章 控制系统的数学模型习题及答案2-1 试建立图2-27所示各系统的微分方程。
其中外力)(t F ,位移)(t x 和电压)(t u r 为输入量;位移)(t y 和电压)(t u c 为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数。
解(a )以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解2-1(a)所示。
根据牛顿定理可写出22)()(dty d m dt dy f t ky t F =-- 整理得)(1)()()(22t F m t y m k dt t dy m f dt t y d =++(b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有 )()(111dtdydt dx f x x k -=- (1) 对B 点有 y k dtdydt dx f 21)(=- (2) 联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++ (c) 应用复数阻抗概念可写出)()(11)(11s U s I cs R cs R s U c r ++= (3) 2)()(R s Uc s I = (4)联立式(3)、(4),可解得: CsR R R R Cs R R s U s U r c 212112)1()()(+++=微分方程为: r r c c u CR dt du u R CR R R dt du 121211+=++(d) 由图解2-1(d )可写出[]Css I s I s I R s U c R R r 1)()()()(++= (5) )()(1)(s RI s RI Css I c R c -= (6) []Css I s I R s I s U c R c c 1)()()()(++= (7)联立式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c 微分方程为 r r r c c c u RC dt du CR dt du u R C dt du CR dt du 222222221213++=++2-2 试证明图2-28中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
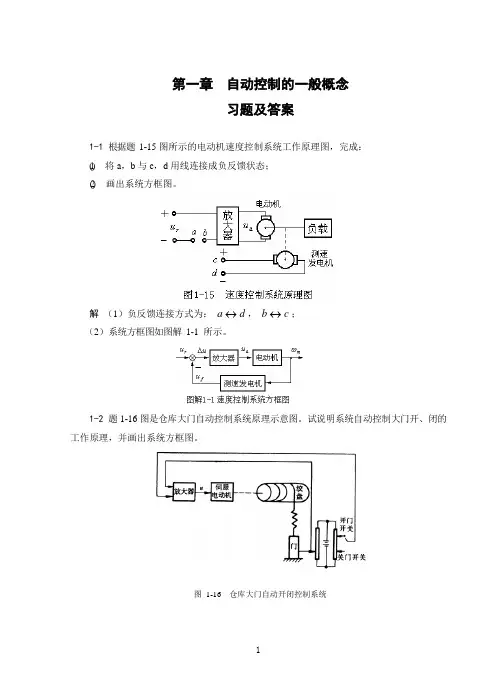
第一章自动控制的一般概念习题及答案1-1 根据题1-15图所示的电动机速度控制系统工作原理图,完成:(1)将a,b与c,d用线连接成负反馈状态;(2)画出系统方框图。
解(1)负反馈连接方式为:a↔d,b↔c;(2)系统方框图如图解1-1所示。
1-2 题1-16图是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。
图1-16仓库大门自动开闭控制系统1解当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。
与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。
反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。
系统方框图如图解1-2所示。
1-3 图1-17为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。
图1-17 炉温自动控制系统原理图解加热炉采用电加热方式运行,加热器所产生的热量与调压器电压u c的平方成正比,u c 增高,炉温就上升,u c的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压u f。
u f作为系统的反馈电压与给定电压u r进行比较,得出偏差电压u e,经电压放大器、功率放大器放大成u a后,作为控制电动机的电枢电压。
在正常情况下,炉温等于某个期望值T°C,热电偶的输出电压u f正好等于给定电压u r。
此时,u e=u r−u f=0,故u1=u a=0,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使u c保持一定的数值。
这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉膛温度T°C由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下2的控制过程:控制的结果是使炉膛温度回升,直至T°C的实际值等于期望值为止。
《自动控制原理》(第2版)习题答案1第2章2-1 (1)t e t ett23sin 3123cos122--+- (2)6 + 3t(3))334(322+++---t t e e t t (4)t t ωωωsin 1132-2-2 (1)2351853tt e e --+-(2)t e 2-(3)t e a b t ae n t nnn t n n ωωζωωζωζωsin cos --++(4)t a Aa t a A e b a A atωωωωωωωsin cos 222222++++⎪⎭⎫ ⎝⎛++- 2-3 (a ))()()(2110f f ms f s X s X i ++=(b )212110)()()(k k s k k f fsk s X s X i ++=2-4 (a ))()()(t u t kx t xm =+ (b ))()()(2121t u t x k k k k t x m =++ 2-5 (a ))()()()()(2212121t u R dt t du C R R t u R R dt t du CR R r r c c +=++ (b ))()()()()()(22121221t u R t u R R dt t du C R R L dt t u d LC R r c c c =++++ 2-6 252312)14(100)()(2+++=s s s s R s C 2523125231210)()(22++++⋅=s s s s s R s E 2-7 t t e e t c 2241)(--+-= 2-8 )1)(2(23)(+++=s s s s G t t e e t h ---=24)(22-9 (a )1)(1)()(32213+++⋅-=s R R C s CR R R s U s U r c (b )13221)()()(R R R s R CR s U s U r c ++-= 2-10 (a )))((1)()(432121G G G G G G s R s C -+++=(b ))(1)1()()(21221H H G G G s R s C -++=(c )331311321332123113211)()(H G H G H G G G G H G G H G G H G G G G s R s C ++++++=2-11 (a )32211)()(G G G G s R s C ++=(b )H G H H G s R s C 111)1()()(+--=(c )121223121)()()(H G G H G G G G s R s C +++=2-12 (a )))((1)1()()(23111232123111134321H G H G H H G G G H G H G H G G G G G G s R s C --++++++=))((1)1(1)()(2311123212311123423H G H G H H G G G H G H G H H G G H G s R s E --++++-+⋅=(b )21212121312)()(G G G G G G G G s R s C ++-++-= 21212131)1(1)()(G G G G G G s R s E ++-+⋅=2-13 (a )12121211)()(H G G G G G G s R s C ++= 121211211)1(1)()(H G G G G H G G s R s E +++⋅=12121231211)1(1)()(H G G G G G G H G G s D s C ++++⋅-=12121231211)1(1)()(H G G G G G G H G G s D s E ++-+⋅= (b )434242143421)()(G G G G G G G G G G G s R s C ++++= 434242111)()(G G G G G G G s R s E ++-=434241)()(G G G G G s D s C ++= 434241)()(G G G G G s D s E ++-=32-14 (a )))((1)(23113343321231134321H G H G H G G H G G G H G H G G G G G G s G -+++-++=(b )3541432326543211)(H G G H G G H G G G G G G G G s G +-+=(c ) 15.1 (d )))((1)1()(ch af ehgf ch gb af gb ed abcd s G +----++=45σ % = 56.2% t p = 1.006 t s = 63-13 0 < K < 0.75 3-14 (1)0(2)1 3-16 (1)∞ ∞6分离点:d = -0.8857(4) 渐近线:σa = -1 ϕa = ± 60︒,180︒与虚轴的交点:K = 3 s = ± j1.414分离点:d = -0.423 根迹图略(5) 渐近线:σa = -2/3 ϕa = ± 60︒,180︒与虚轴的交点:K = 4 s = ± j1.414(6)渐近线:σa = -1.5 ϕa = ± 45︒,± 135︒起始角:ϕ1 = -63.4︒根迹图略 (7)(8)894-9 零度根轨迹。