《自动控制原理2.1》
- 格式:ppt
- 大小:4.31 MB
- 文档页数:103
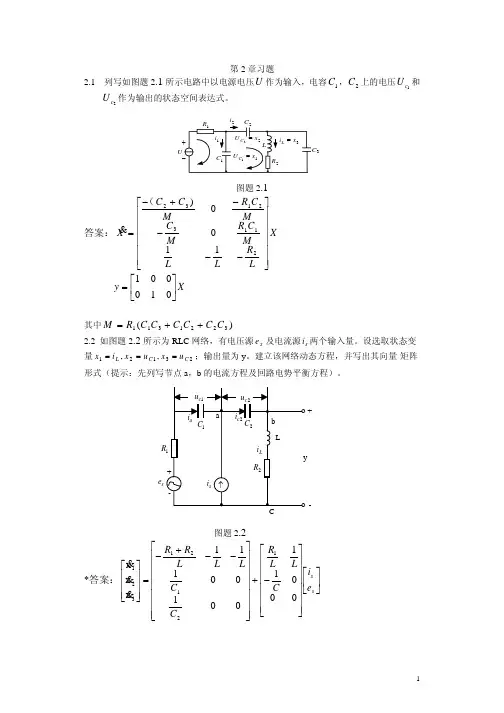
第2章习题2.1 列写如图题2.1所示电路中以电源电压U 作为输入,电容1C ,2C 上的电压1c U 和2c U 作为输出的状态空间表达式。
图题2.1答案:X L R LL M C R M C M C R M C C X ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡−−−−+−=211321321100)(& X y ⎥⎦⎤⎢⎣⎡=010001其中)(3221311C C C C C C R M ++=2.2 如图题2.2所示为RLC 网络,有电压源s e 及电流源s i 两个输入量。
设选取状态变量23121,,C C L u x u x i x ===;输出量为y 。
建立该网络动态方程,并写出其向量-矩阵形式(提示:先列写节点a ,b 的电流方程及回路电势平衡方程)。
图题2.2*答案:⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡−+⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡−−+−=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡s s e i C L L R C C L L L RR 0001100100111x x x 12121321&&&U 3+-se[]111−−−=R y ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321x x x +[]⎥⎦⎤⎢⎣⎡s s e i R 11 2.3 列写图题2.3所示RLC 网络的微分方程。
其中,r u 为输入变量,c u 为输出变量图题2.3答案:r c cc u u dt du RC dtu d LC =++22 2.4 列写图题2.4所示RLC 网络的微分方程,其中r u 为输入变量,c u 为输出变量。
图题2.4答案:r c cc uu dt du R L dtu d LC =++22 2.5 图题2.5所示为一弹簧—质量—阻尼器系统,列写外力)(t F 与质量块位移)(t y 之间)(t图题2.5答案:)()()()(22t f t ky dt t dy f dtt y d m =++ 2.6 列写图题2.6所示电路的微分方程,并确定系统的传递函数,其中r u 为输入变量,cu 为输出变量。
自动控制原理目录模板
一、引言
二、基本概念
2.1 自动控制原理的定义
2.2 自动控制系统的组成
2.3 控制对象与被控对象
三、反馈控制系统
3.1 反馈控制的概念
3.2 反馈控制系统的基本结构
3.3 正反馈与负反馈的区别
四、控制器与传感器
4.1 控制器的作用与分类
4.2 常见的控制器类型及其工作原理
4.3 传感器的作用与分类
4.4 常用传感器的原理及应用领域
五、常见控制策略
5.1 开环控制与闭环控制
5.2 比例控制与积分控制
5.3 逆向控制与前馈控制
5.4 模糊控制与PID控制
5.5 控制策略的选择与应用案例
六、自动控制原理在实际中的应用
6.1 工业控制领域的案例分析
6.2 智能家居系统的设计与实现
6.3 机器人控制技术的发展与应用
七、自动控制原理的挑战与前景展望
7.1 当前自动控制原理面临的挑战
7.2 自动控制原理未来的发展趋势
八、结论
注意:以上仅为目录模板,具体内容和篇幅需根据实际情况来确定。
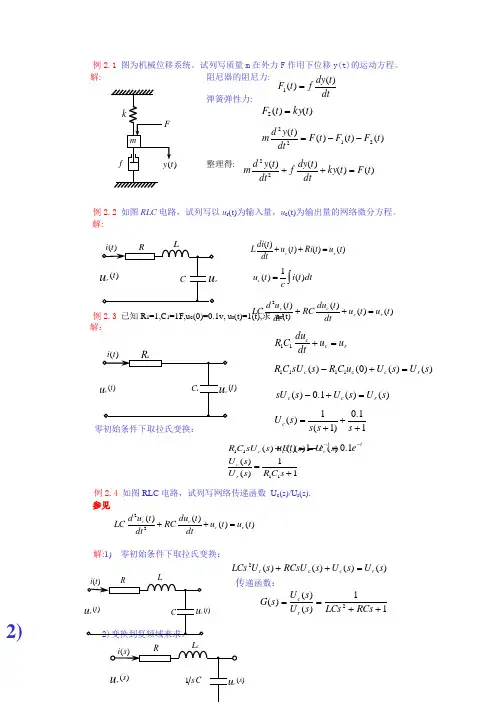
例2.1 图为机械位移系统。
试列写质量m 在外力F 作用下位移y(t)的运动方程。
解: 阻尼器的阻尼力: 弹簧弹性力:整理得:例2.2 如图RLC 电路,试列写以u r (t)为输入量,u c (t)为输出量的网络微分方程。
解:例2.3 已知R 1=1,C 1=1F,u c (0)=0.1v, u r (t)=1(t),求 u c (t) 解:零初始条件下取拉氏变换:例2.4 如图RLC 电路,试列写网络传递函数 U c (s)/U r (s). 参见)()()()(22t u t u dt t du RC dt t u d LC r c c c =++解:1) 零初始条件下取拉氏变换:)()()()(2s U s U s RCsU s U LCs rc c c =++传递函数:11)()()(2++==RCs LCs s U s U s G r c)()()(11s U s U s sU C R r c c =+11)()(11+=s C R s U s U r c dtt dy ft F )()(1=)()(2t ky t F =)()()()(2122t F t F t F dtt y d m --=)()()()(22t F t ky dt t dy f dt t y d m =++2)))()()()(t u t Ri t u dtt di L r c =++⎰=dt t i c t u c )(1)()()()()(22t u t u dt t du RC dt t u d LC r c c c =++rc c u u dt du C R =+11)()()0()(1111s U s U u C R s sU C R r c c c =+-)()(1.0)(s U s U s sU r c c =+-11.0)1(1)(+++=s s s s U c tt c e e t u --+-=1.01)()t )t )s例2.5 已知R 1=1,C 1=1F ,1)求零状态条件下阶跃响应u c (t);2) u c (0)=0.1v, u r (t)=1(t), 求 u c (t);3)求脉冲响应g(t)。

自动控制原理-教案一、课程简介1.1 课程背景自动控制原理是工程技术和科学研究中的重要基础,广泛应用于工业、农业、医疗、航空航天等领域。
本课程旨在介绍自动控制的基本理论、方法和应用,使学生掌握自动控制系统的基本原理和设计方法,具备分析和解决自动控制问题的能力。
1.2 教学目标(1)理解自动控制的基本概念、原理和分类;(2)掌握线性系统的数学模型建立和求解方法;(3)熟悉系统的稳定性、瞬态和稳态性能分析;(4)学会设计简单的线性控制器;(5)了解自动控制技术的应用和发展趋势。
二、教学内容2.1 自动控制的基本概念(1)自动控制系统的定义和分类;(2)自动控制系统的组成和基本环节;(3)自动控制系统的性能指标。
2.2 线性系统的数学模型(1)连续时间线性系统的数学模型;(2)离散时间线性系统的数学模型;(3)系统的状态空间表示。
2.3 系统的稳定性分析(1)连续时间线性系统的稳定性;(2)离散时间线性系统的稳定性;(3)系统稳定性的判定方法。
2.4 系统的瞬态和稳态性能分析(1)连续时间线性系统的瞬态响应;(2)离散时间线性系统的瞬态响应;(3)系统的稳态性能分析。
2.5 控制器的设计方法(1)PID控制器的设计;(2)状态反馈控制器的设计;(3)观测器的设计。
三、教学方法3.1 讲授法通过课堂讲授,系统地介绍自动控制原理的基本概念、理论和方法。
3.2 案例分析法通过分析实际案例,使学生更好地理解自动控制系统的原理和应用。
3.3 实验法安排实验课程,让学生亲自动手进行实验,培养实际操作能力和问题解决能力。
3.4 讨论法组织学生进行课堂讨论,促进学生思考和交流,提高分析和解决问题的能力。
四、教学评估4.1 平时成绩包括课堂表现、作业完成情况、实验报告等,占总成绩的30%。
4.2 期中考试通过期中考试检验学生对自动控制原理的基本概念、理论和方法的掌握程度,占总成绩的30%。
4.3 期末考试通过期末考试全面评估学生对自动控制原理的掌握程度,占总成绩的40%。
自动控制原理第三版课后答案 1. 课后习题答案。
1.1 第一章。
1.1.1 选择题。
1. A。
2. C。
3. B。
4. A。
5. D。
1.1.2 填空题。
1. 系统。
2. 控制。
3. 输入。
4. 输出。
5. 误差。
1.1.3 简答题。
1. 控制系统是指能够对某一对象进行控制的系统,包括反馈控制系统和前馈控制系统两种类型。
2. 控制系统的基本组成包括输入端、输出端、控制器和执行器四个部分。
3. 控制系统的闭环和开环是指系统是否具有反馈环节,闭环系统具有反馈环节,开环系统则没有。
1.2 第二章。
1.2.1 选择题。
1. B。
2. A。
3. D。
4. C。
5. B。
1.2.2 填空题。
1. 传递函数。
2. 时域。
3. 频域。
4. 线性。
5. 时不变。
1.2.3 简答题。
1. 传递函数是描述系统输入输出关系的函数,通常用H(s)表示。
2. 时域分析是指通过对系统的状态方程进行求解,得到系统的时域响应。
3. 频域分析是指通过对系统的传递函数进行频域分析,得到系统的频域特性。
2. 综合题。
2.1 第三章。
2.1.1 选择题。
1. D。
2. A。
3. B。
4. C。
5. D。
2.1.2 填空题。
1. 稳定。
2. 系统。
3. 极点。
4. 零点。
5. 阶跃响应。
2.1.3 简答题。
1. 稳定性是指系统在受到干扰或参数变化时,能够保持稳定的特性。
2. 极点和零点是描述系统传递函数特性的重要参数,极点决定系统的稳定性,零点则影响系统的动态响应特性。
2.2 第四章。
2.2.1 选择题。
1. B。
2. C。
3. A。
4. D。
5. B。
2.2.2 填空题。
1. PID。
2. 比例。
3. 积分。
4. 微分。
5. 控制。
2.2.3 简答题。
1. PID控制器是一种常用的控制器,由比例、积分和微分三部分组成,能够实现对系统的稳定控制。
2. 比例控制器的作用是根据当前误差的大小来调节控制量,积分控制器的作用是根据误差的历史累积值来调节控制量,微分控制器的作用是根据误差变化速度来调节控制量。
自动控制原理课后习题答案 第二章2.1 试分别写出图2.68中各无源电路的输入u r (t )与输出u c (t )之间的微分方程。
图2.68 习题2.1图解: (a)11r c u u i R -=,2()r c C u u i -=,122c u i i R +=,12122121212c c r r R R R R R Cu u Cu u R R R R R R +=++++ (b) 11()r c C u u i -=,121r u u i R -=,1221i i C u +=,121c u i R u =+, 121211122112121121()()c c c r r r R R C C u R C R C R C u u R R C C u R C R C u u ++++=+++(c)11r cu u i R -=,112()r C u u i -=,1122u i i R +=,1121c u i dt u C =+⎰, 121212222112122221()()c c c r r r R R C C u R C R C R C u u R R C C u R C R C u u ++++=+++2.2 试证明图2.69(a)所示电路与图2.69(b)所示的机械系统具有相同的微分方程。
图2.69(b)中X r (t )为输入,X c (t )为输出,均是位移量。
(a) (b)图2.69 习题2.2图解: (a)11r cu u i R -=,12()r c C u u i -=,12i i i +=,221c u idt iR C =+⎰, 121211122212121122()()c c c r r r R R C C u R C R C R C u u R R C C u R C R C u u ++++=+++(b) 2121()c B x x K x -=,1121()()()r c r c c B x x K x x B x x -+-=-,121221212121211212()()c c c r r r B B B B B B B B Bx x x x x x K K K K K K K K K ++++=+++2.3 试分别求出图2.70中各有源电路的输入u r (t )与输出u c (t )之间的微分方程。