步进顺控指令应用(12.10.22)
- 格式:doc
- 大小:912.50 KB
- 文档页数:16
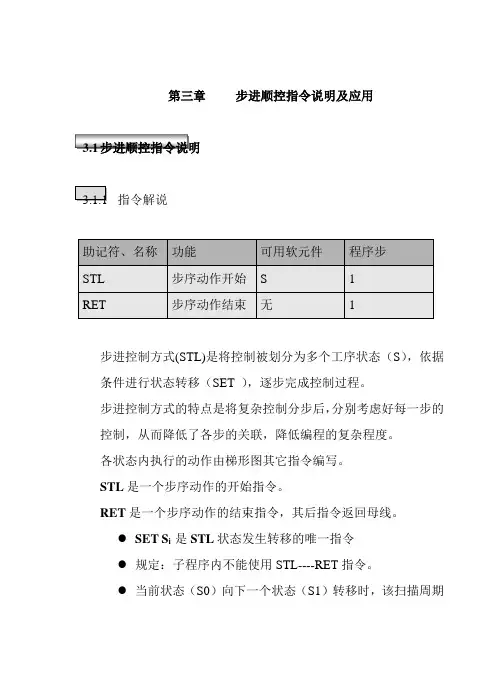
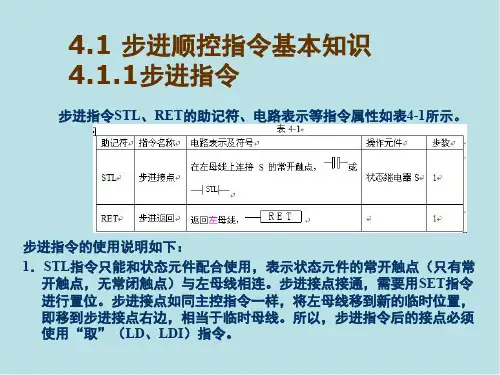
第三章步进顺控指令说明及应用指令解说步进控制方式(STL)是将控制被划分为多个工序状态(S),依据条件进行状态转移(SET ),逐步完成控制过程。
步进控制方式的特点是将复杂控制分步后,分别考虑好每一步的控制,从而降低了各步的关联,降低编程的复杂程度。
各状态内执行的动作由梯形图其它指令编写。
STL是一个步序动作的开始指令。
RET是一个步序动作的结束指令,其后指令返回母线。
●SET S i 是STL状态发生转移的唯一指令●规定:子程序内不能使用STL----RET指令。
●当前状态(S0)向下一个状态(S1)转移时,该扫描周期两个状态内的动作均得到执行;下一扫描周期执行时,当前状态(S0)被下一状态(S1)所复位,当前状态(S0)内的所有动作不被执行,所有OUT元件的输入均被断开。
●步序与步序之间一般省去RET,因此看起来是多个STL可共用一个RET。
有STL而没有RET,程序检查出错。
3.1.2 编程示例●步序与步序之间一般省去RET,因此看起来是多个STL可共用一个RET。
有STL而没有RET,程序检查出错。
●状态转移只能用SET指令,不能用OUT指令。
●使用OUT S时,S作为辅助继电器使用,而不是状态寄存器。
●时间继电器T可重复使用,但相邻两个状态不能重复使用同一时间继电器。
●两个矛盾继电器输出时,必需加软件互锁。
考虑软件快于硬件,相矛盾的硬件输出也必需互锁。
●允许同一继电器在不同状态下输出,其实际输出视状态转移的位置确定。
单一流程示例示例说明:该程序描述一个自行葫芦自进入工位到走出工位的步序过程,若在葫芦升降过程中发生停电,来电后继续停电前的动作,并保证升或降动作总时间不变。
S500---S503为停电保持型状态寄存器;C100---C101为停电保持型计数器;T0延时2秒,作信号确认用;T1作为500 ms脉冲发生器;X0=ON时,表示工位上停有自行葫芦;T0=ON时,表明工位上无自行葫芦;因信号由滑触线供给,因而X0=OFF时,不一定确定工位无车,需延时确认。
![项目3 PLC步进顺控指令及其应用PPT[80页]](https://uimg.taocdn.com/835e6a7cfad6195f302ba60d.webp)


《可编程控制器与变频器》教案编号:09教案续页《可编程控制器与变频器》教案编号:10教案续页(1)可编程控制器实训装置1台(2)PLC主机模块1个(3)开关、按钮板模块一个(4) 交流接触器模块1个(5) 交流接触器、热继电器模块1个(6) 三相电动机1台(7) 指示灯模块1个(8)计算机1台(9) 电工常用工具1条(10) 导线若干5、系统调试《可编程控制器与变频器》教案编号:11教案续页3.2步进顺控指令及其编程方法3.2.1步进顺控指令仅有两条步进顺控指令,其中STL ( Step Ladder)是步进开始指令,已是该状态的负载可以被驱动,RET是步进返回指令,也叫步进结束指令,使步进顺控程序执行完毕时,非步进顺控程序的操作在主母线上完成。
3.2.2状态转移图的编程方法对状态转移图进行编程,就是如何使用STL和RET指令的问题,编程原则是:先进行负载的驱动处理,然后进行状态的转移处理。
负载驱动及转移处理必须在STL指令之后进行,负载的驱动通常使用OUT指令;状态的转移必须使用SET指令。
但是若是向上转移,向非相邻的下游转移或向其他流程转移,一般不能使用SET指令,而用OUT指令。
3.2.3编程注意事项(1)与STL指令相连的触点使用LD或LDI指令,下一条STL指令的出现意味着当前STL程序区的结束和新的STL程序区的开始,最后一个STL程序区结束时,一定要使用RET指令,这就意味着整个STL程序区的结束,否则将出现“程序语法错误”信息,PLC不能执行用户程序。
(2)初始状态必须预先做好驱动,否则状态流程不可能向下进行。
一般用控制系统的初始条件,若无初始条件,可用M8002或M8000进行驱动。
M8002是一个初始脉冲辅助继电器,它只在PLC运行开关由STOP-》RUN时其动合触点闭合一个周期,股初始状态S0就只被它激活一次,初始状态S0就只有初始位置和复位功能。
(3)STL指令后可以直接驱动或通过别的触点来驱动Y、M、S、T、C等原件的线圈和功能指令。
PLC步进顺控指令的应用-1虽然该类的题目见的很多,可是好象讲清楚的并没见到。
就是本人来讲,也是看了很久都无法清楚。
故才下决心搞懂它。
差不多花了一天多时间才明白它的道理,它并不复杂,而且很好画梯形图和编程。
顺控实际是按照生产工艺要求而规定的一定操作顺序而已。
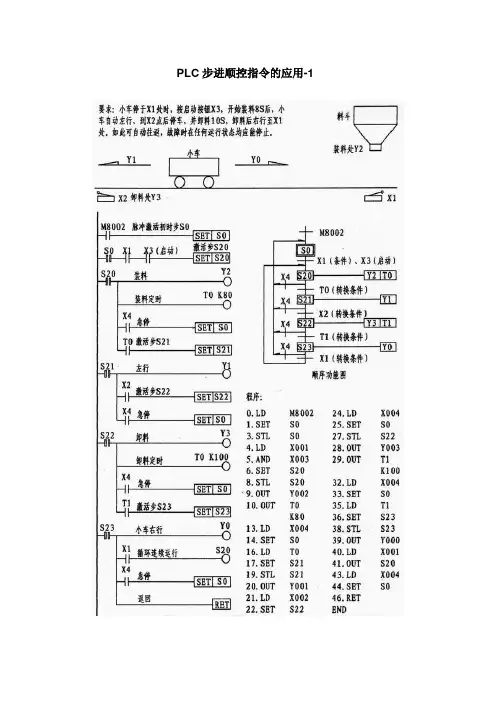
首先要根据生产工艺要求,画出顺序功能图,然后根据功能图再画出梯形图。
上图即为顺序功能图:图中双框S0表示为初始步,单框中的S20、S21、S22、S23依次根据工艺顺序要求而设置的各活动步。
我们来看S0初始步上方垂线上设有M8002其为初始步激活的条件(该步的意思不妨可以理解为自动合上空开?),在S0步与S20步之间有X1、X3,它说明只有符合这二条件要求后,步才能从S0步转移到S20步,而当S20步处于活动状态时Y002、T0处于动作状态。
而S20步与S21步之间的T0,它受时间控制,只要时间一到,S21步被激活投入,使Y001处于工作,同时S20步则处于关闭(其控制的Y002、T0则停止)以下各步中的X2、T1、X1含意均同(均为转换条件),但要注意下一步被激活,其相应控制元件则动作,意味着上一步被停止。
而各步之间均插入了X4其箭头均指向初始步S0,即恢复处于初始状态,X4在这地方的作用是急停。
而步S23下的X1条件一符合,可转入步S20,即处于循环状态。
根据顺序功能图就可很方便地将它转换成梯形图。
梯形图如上图所示,其工作过程如下:第一梯级中的0、LD M8002:M8002为特殊辅助继电器的常开触点,其作用仅在PLC通电瞬间接通。
1、SET S0: SET为置位指令,功能是驱动线圈,并使其具有自保功能。
也就是说在PLC通电的瞬间M8002产生一脉冲,将状态元件S0激活(并自保持)。
第二梯级中最左侧的3、STL S0:STL为步进触点指令,功能为步进触点驱动,当上一步(1、SET S0)为置位时该接点闭合,4、LD X001为小车停止位置的必要条件,也就是说小车开始时必须停在X1位置(该接点才能闭合),此时按外部的按钮(SB1)从而驱动(5、AND X003)的闭合,程序才能执行,这就是所说的条件。
课题三步进顺控指令应用在教材的课题二中主要介绍了用经验设计法设计PLC程序,对于简单的程序设计,经验设计法比较奏效,可以收到快速、简单的效果。
但是,这种方法没有规律可遵循,具有很大的试探性和随意性,往往需经多次反复修改和完善才能符合设计要求,所以设计的结果往往不很规范,因人而异。
因此,经验设计法一般适合于设计一些简单的梯形图程序或复杂系统的某一局部程序(如手动程序等)。
如果用来设计复杂系统梯形图,则存在以下问题:(1)考虑不周、设计麻烦、设计周期长;(2)梯形图的可读性差、系统维护困难。
目前,在设计复杂系统梯形图时比较常用的一种方法是顺序控制设计法。
因为在工业控制领域中,顺序控制系统的应用很广,尤其在机械行业,几乎无例外地利用顺序控制来实现加工的自动循环。
顺序控制设计法就是针对顺序控制系统的一种专门的设计方法。
这种设计方法很容易被初学者接受,对于有经验的工程师,也会提高设计的效率,程序的调试、修改和阅读也很方便。
PLC的设计者们还为顺序控制系统的程序编制提供了大量通用和专用的编程元件,开发了专门供编制顺序控制程序用的功能表图,使这种先进的设计方法成为当前PLC程序设计的主要方法。
本课题就是通过5个典型的工作任务分别采用PLC程序的顺序控制设计法中的步进逻辑公式设计法、单序列结构编程法、选择序列结构编程法和并行序列结构编程法进行步进顺控设计的介绍。
学时分配表任务1 送料小车自动往返循环控制一、教学目标分析1.教学重点分析由于本任务控制是典型小车(或工作台)多地自动往返控制,在进行这种控制类型的步进顺序控制时,使用最简单和最有效的编程设计方法就是步进逻辑公式法,该设计方法的最大优点是只要将小车(或工作台)多地自动往返的控制,按照控制要求首先分出程序步,然后根据步进逻辑公式,列出每个程序步的逻辑代数表达式,再利用简单的基本指令,采用“启-保-停”电路就可将每个程序步的逻辑代数表达式转换成梯形图,完成控制程序的设计。
由此可看出该设计方法的关键是根据步进逻辑公式,列出每个程序步的逻辑代数表达式,因此,该任务的教学重点是步进逻辑公式的含义及应用的介绍。
2.教学难点分析运用步进逻辑公式设计法的难点是必须很清楚地知道每个程序步的开始条件和程序步之间的转换条件,即每个程序步之间的相互联系,因此,该任务教学的难点是程序步的划分和每个程序步之间转换条件的确立。
二、教学资源条件本工作任务教学所使用的实训设备及工具材料可参考教材表3-1-1。
为了体现新知识、新工艺、新材料、新设备,有条件的学校也可将本任务中所用的行程开关SQ1、SQ2和SQ3,即教材表3-1-1中的3个LX19-121型(单轮、滚轮装在传动杆外侧,能自动复位)行程开关,更换成教材知识拓展环节中所介绍的传感器。
三、教学参考流程本工作任务的教学参考流程如图3-1-1所示。
图3-1-1 本工作任务的教学参考流程四、教学建议1.编程的基本知识在介绍三菱PLC的编程基本知识时,建议采用送料小车三地自动往返循环控制的多媒体课件创设情景,先介绍顺序控制及顺序控制设计法的定义,然后重点介绍步进逻辑公式表达式及含义,最后介绍如何将每个程序步的逻辑代数表达式,利用简单的基本指令,采用“启-保-停”电路转换成梯形图的编程方法。
(1)顺序控制设计法在讲述顺序控制设计法之前,要让学生知道前面工作任务所介绍的经验设计法,实际上是用输入信号X直接控制输出信号Y,如果无法直接控制或为了解决联锁和互锁功能,只好被动地增加一些辅助元件和辅助触点。
由于各系统输出量Y与输入量X之间的关系和对联锁、互锁的要求千变万化,所以有时候设计起来难以得心应手。
然后对本工作任务的控制要求进行分析,指出本工作任务的工作过程是按一定顺序进行控制的过程,最后引出顺序控制的定义及其设计方法——顺序控制设计法。
(2)顺序功能图的组成要素顺序控制设计法的关键就是必须首先根据系统的工艺(或控制)过程,画出顺序功能图,然后再根据顺序功能图画出梯形图。
因此,教学中要重点讲述顺序功能图的组成及画法。
教学中建议采用顺序控制的多媒体课件创设情景,以本工作任务为例详细讲授顺序功能图的组成要素,以及顺序功能图中步的划分,转换条件的设置和每一步的动作及转换等知识和技巧。
(3)单序列结构形式的顺序功能图教学中只需简单地让学生知道,根据步与步之间转换的不同情况,顺序功能图有三种不同的基本结构形式:单序列结构、选择序列结构和并行序列结构。
而单序列结构的顺序功能图将在“任务 2 液体混合控制系统”中重点讲述,选择序列结构和并行序列结构将分别在“任务3自动门控制系统”和“任务4十字路口交通灯控制”进行重点讲述。
(4)用“启-保-停”电路实现的单序列结构的编程方法在介绍顺序功能图的编程方法时,建议采用顺序控制的多媒体课件创设情景,先介绍目前常用的顺序功能图的编程方法有三种:即采用基本指令使用“启-保-停”电路的编程方法、使用STL指令的编程方法、以转换为中心的编程方法。
然后重点介绍采用基本指令使用“启-保-停”电路实现的单序列结构的编程方法,最后详细讲解步进逻辑公式的含义及应用。
2.工作任务的实施工作任务实施的教学流程如图3-1-2所示。
图3-1-2 工作任务实施的教学流程五、教学参考资料采用基本指令,利用“启-保-停”电路由顺序功能图画出梯形图的编程方法,在许多专业教材中都有介绍。
而采用步进逻辑公式设计法,通过逻辑代数方程表达式进行步进顺控设计的PLC专业教材目前较少,本教材即对此作了介绍。
通过逻辑代数方程表达式进行步进顺序控制设计的步进逻辑公式设计法,不仅适用于PLC控制系统的程序设计,而且还是继电—接触器控制的步进顺序控制设计的一种有效而重要的设计手段。
教材对“多地自动往返循环控制”做了介绍,在此以“巩固与提高”环节中技能题的“小车四地自动往返控制”设计题目为例,进一步介绍步进逻辑公式法的应用,供教师教学中参考。
值得一提的是,步进逻辑公式法特别适用于这种通过行程开关控制的小车(或工作台)的多点自动循环步进顺序控制的设计。
应用步进逻辑公式法进行设计,程序步的划分是关键和首要条件。
在“小车四地自动往返控制”系统中,输出信号为KM1和KM2,输入信号由1个起动按钮和1个停止按钮发出,反馈信号由4个行程开关(SQ1、SQ2、SQ3和SQ4)发出。
小车运行程序分步图如图3-1-3所示。
图3-1-3 小车运行程序分步图此时的输出状态是指控制电路的输出触点的状态,如图3-1-3所示的控制电路中,如果小车向右运行,那么KM1得电KM2失电。
在小车向右运行期间,输出状态保持KM1得电、KM2失电的状态,由定义可得这是一程序步。
当小车向左运行时又变成KM1失电、KM2得电,系统又转入另一个程序步。
根据程序步的定义可知小车运行轨迹可分为M1、M2、M3、M4、M5五步,每步的转步信号可分别设为SQ1、SQ2、SQ3、SQ4,如图3-1-3所示。
根据步进逻辑公式可得如下方程组:1212()M SB M M -=+ (3—1)23123()M SQ M M M -=*+ (3—2)32234()M SQ M M M -=*+ (3—3)44345()M SQ M M M -=*+ (3—4)51452()M SQ M M SQ -=*+ (3—5) 由于行程开关SQ1、SQ2、SQ3、SQ4是小车的反馈输入信号,若分别用X002、X003、X004和X005所代替,则上述方程组可转换成下列方程组:112(001)M X M M -=+ (3—6)2123(004)M X M M M -=*+ (3—7)3234(003)M X M M M -=*+ (3—8)4345(005)M X M M M -=*+ (3—9)545(002)003M X M M X -=*+ (3—10) 要“结束”控制流程,必须增加停止按钮SB2(X000)来使系统停止工作。
逻辑代数方程组再次修改为:112(001)000M X M M X --=+* (3—11)2123(004)000M X M M M X --=*+* (3—12)3234(003)000M X M M M X --=*+* (3—13)4345(005)000M X M M M X --=*+* (3—14)545(002)003000M X M M X X --=*+* (3—15) 因为KM1得电,小车向右运行,而KM2得电,小车向左运行,所以程序步与KM1和KM2之间的函数为:1351()21KM M M M KM SB FR ---=++** (3—16)242()11KM M M KM SB FR ---=+** (3—17) 考虑编程,分别将输出继电器Y000(KM1)、Y001(KM2)和停止按钮SB1(X000)以及过载保护用的热继电器FR (X006)带入上面函数,可得小车向左和向右运行的逻辑代数方程组:135000()001000006Y M M M Y X X ---=++** (3—18)24001()000000006Y M M Y X X ---=+** (3—19) 在实际生产控制过程中,考虑到KM1和KM2之间的动作转换不能立即进行,所以M3、M5和M2、M4不能直接引发KM1和KM2得电,必须经过时间继电器延时,故有如下改进:112(001)000006M X M M X X ---=+** (3—20)2123(004)000006M X M M M X X ---=*+** (3—21)3234(003)000006M X M M M X X ---=*+** (3—22)4345(005)000006M X M M M X X ---=*+** (3—23)545(002)003000006M X M M X X X ---=*+** (3—24)035()000006T M M X X --=+* (3—25)124()000006T M M X X --=+* (3—26)10000()001000006Y M T Y X X ---=+** (3—27)1001000000006Y T Y X X ---=*** (3—28) 综上所述,通过对小车的运行分步,然后根据步进逻辑公式,列出步进逻辑代数表达式,最后根据步进逻辑代数表达式画出梯形图。
其梯形图程序如图3-1-4所示。
图3-1-4 小车四点自动往返控制六、教学设计示例1.组织教学可参考课题二任务1相关内容,略。
2.复习旧课引出新课通过提问等方式,带领学生复习经验法设计的特点等相关知识,为后面的教学内容做准备。
3.讲解新课(1)目标描述教学资源及工具:送料小车三地自动往返循环控制多媒体课件、成品实物展示、工作任务书。