PLC步进顺控指令
- 格式:docx
- 大小:19.27 KB
- 文档页数:4
顺控指令的使用方法和注意事项
顺控指令,即顺序控制指令,主要用于PLC编程中实现逻辑控制的流程化、顺序化。
使用方法主要包括:
1. 初始化:设置初始步(如S0),作为流程起点。
2. 逻辑转移:根据条件设置转移指令(如STL、RET、CALL等),实现从一步到另一步的跳转。
3. 动作执行:在每一步内编写相应的输出、定时、计数等操作。
注意事项:
1. 步进必须逐级进行,不可越级转移。
2. 注意初始化与结束处理,避免死循环或未完成全部流程。
3. 条件转移应确保逻辑严谨,避免因条件缺失导致流程混乱。
4. 保持程序清晰,合理使用标签和注释,方便后期维护。
5. 复杂顺控程序中,可能需要用到状态寄存器、堆栈等功能,注意合理运用。
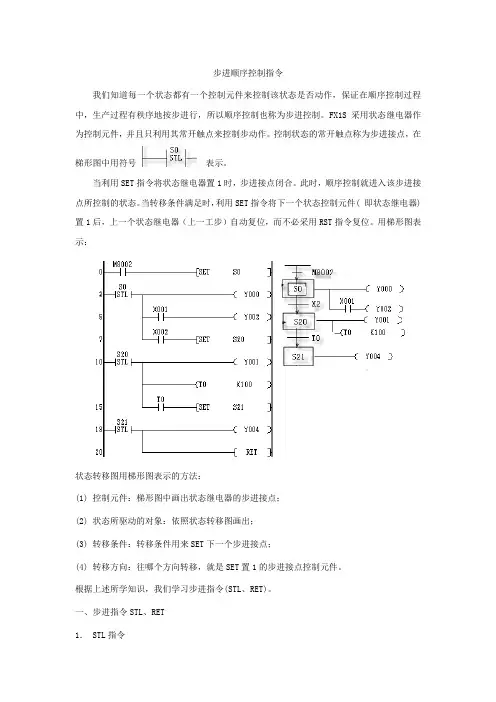
步进顺序控制指令我们知道每一个状态都有一个控制元件来控制该状态是否动作,保证在顺序控制过程中,生产过程有秩序地按步进行,所以顺序控制也称为步进控制。
FX1S采用状态继电器作为控制元件,并且只利用其常开触点来控制步动作。
控制状态的常开触点称为步进接点,在梯形图中用符号表示。
当利用SET指令将状态继电器置1时,步进接点闭合。
此时,顺序控制就进入该步进接点所控制的状态。
当转移条件满足时,利用SET指令将下一个状态控制元件( 即状态继电器)置1后,上一个状态继电器(上一工步)自动复位,而不必采用RST指令复位。
用梯形图表示:状态转移图用梯形图表示的方法:(1)控制元件:梯形图中画出状态继电器的步进接点;(2)状态所驱动的对象:依照状态转移图画出;(3)转移条件:转移条件用来SET下一个步进接点;(4)转移方向:往哪个方向转移,就是SET置1的步进接点控制元件。
根据上述所学知识,我们学习步进指令(STL、RET)。
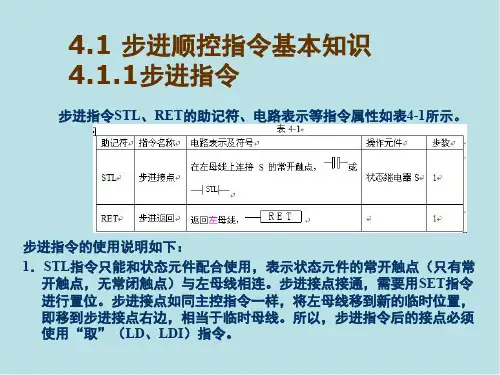
一、步进指令STL、RET1.STL指令STL指令称为“步进接点“指令。
其功能是将步进接点接到左母线。
格式:操作元件:状态继电器S。
RET指令称为“不仅返回“指令。
其功能是使临时左母线回到原来左母线的位置。
格式:操作元件:无。
程序举例:步进接点只有常开触点,没有常闭触点。
步进接通需要SET指令进行置1,步进接点闭合,将左母线移动到临时左母线,与临时左母线相连的触点用LD、LDI指令,如上图。
在每条步进指令后不必都加一条RET指令,只需在连续的一系列步进指令的最后一条的临时左母线后接一条RET指令返回原左母线,且必须有这条指令。
2.指令说明:(1)步进接点与左母线相连时,具有主控和跳转作用;(2)状态继电器S只有在使用SET指令以后才具有步进控制功能,提供步进接点。
(3)在状态转移图中,会出现在一个扫描周期内两个或两个以上状态同时动作的可能因此在相邻的步进接点必须有联锁措施。
(4)状态继电器在不仅状态转移图中使用可以按编号顺序使用,也可以任意。
PLC步进顺控指令
虽然该类的题目见的很多,可是好象讲清楚的并没见到。
就是本人来讲,也是看了很久都无法清楚。
故才下决心搞懂它。
差不多花了一天多时间才明白它的道理,它并不复杂,而且很好画梯形图和编程。
顺控实际是按照生产工艺要求而规定的一定操作顺序而已。
首先要根据生产工艺要求,画出顺序功能图,然后根据功能图再画出梯形图。
上图即为顺序功能图:图中双框S0表示为初始步,单框中的S20、S21、S22、S23依次根据工艺顺序要求而设置的各活动步。
我们来看S0初始步上方垂线上设有M8002其为初始步激活的条件(该步的意思不妨可以理解为自动合上空开?),在S0步与S20步之间有X1、X3,它说明只有符合这二条件要求后,步才能从S0步转移到S20步,而当S20步处于活动状态时Y002、T0处于动作状态。
而S20步与S21步之间的T0,它受时间控制,只要时间一到,S21步被激活投入,使Y001处于工作,同时S20步则处于关闭(其控制的Y002、T0则停止)以下各步中的X2、T1、X1含意均同(均为转换
条件),但要注意下一步被激活,其相应控制元件则动作,意味着上一步被停止。
而各步之间均插入了X4其箭头均指向初始步S0,即恢复处于初始状态,X4在这地方的作用是急停。
而步S23下的X1条件一符合,可转入步S20,即处于循环状态。
根据顺序功能图就可很方便地将它转换成梯形图。
梯形图如上图所示,其工作过程如下:
第一梯级中的0、LD M8002:M8002为特殊辅助继电器的常开触点,其作用仅在PLC通电瞬间接通。
1、SET S0:SET 为置位指令,功能是驱动线圈,并使其具有自保功能。
也就是说在PLC通电的瞬间M8002产生一脉冲,将状态元件S0激活(并自保持)。
第二梯级中最左侧的3、STL S0:STL为步进触点指令,功能为步进触点驱动,当上一步(1、SET S0)为置位时该接点闭合,4、LD X001为小车停止位置的必要条件,也就是说小车开始时必须停在X1位置(该接点才能闭合),此时按外部的按钮(SB1)从而驱动(5、AND X003)的闭合,程序才能执行,这就是所说的条件。
当这二条件满足后才能激活状态元件S20(6、SET S20),从而转入第三梯级。
第三梯级中左侧的S20(8、STL S20),因状态元件S20的激活而导通,输出继电器Y002(9、OUT Y002)接通(带动外部的接触器开始工作),开始装料。
而同时T0(10、OUT T0 K80)则开始计时(其整定值为8S),时间一到,时间继电器的常开触点接通(16、LD T0)并激活状态元件S21(17、SET S21),当S21一旦激活,程序自动转入第四梯级,同时第三梯级停止运行。
此时在装料的过程一旦出现故障,可按外部按钮(SB2)使X4(13、LD X004)导通从而激活S0,使程序回归于第二梯级,由于第二梯级有X3的把持,使程序不能再运行下去,故起了急停的作用。
第四梯级中左侧的S21(19、STL S21),因状态元件S21的激活而导通,输出继电器Y001(20、OUT Y001)接通(带动外部的反转接触器开始工作)小车左行,至X2处,限位开关使X2(21、LD X002)闭合并激活状态元件S22(22、SET S22)程序自动转入第五梯级,同时第四梯级停止运行。
而X4的作用与第三梯级中的作用相同。
第五梯级中左侧的开始卸料, 而T1(29、OUT T1 K100)同时开始计时(其整定值为10S),时间一到,时间继电器的常开触点T1(35、LD T1)接通并激活状态元件S23(36、SET S23),当S23一旦激活,程序自动转入第六梯级,同
时第五梯级停止运行。
而X4的作用与第三梯级中的作用相同。
第六梯级中左侧的S23(38、STL S23),因状态元件S23的激活而导通,输出继电器Y000(39、OUT Y000)接通(带动外部的正转接触器开始工作)小车开始右行,此时若一切正常小车自动返回于X1处,又重新由第三梯级处循环运行。
若不正常则按下X4回归S0处。
而46、RET是步进结束指令,表示状态流程结束,用于返回主程序的指令。