步进顺控指令说明及应用
- 格式:doc
- 大小:1.43 MB
- 文档页数:13
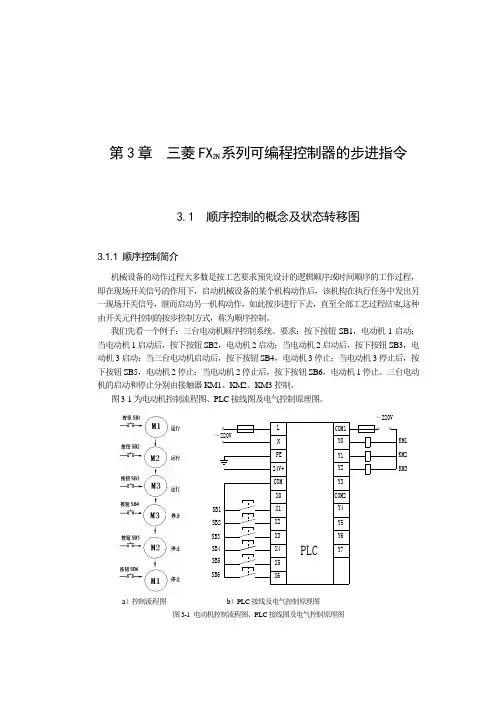
第3章 三菱FX 2N 系列可编程控制器的步进指令3.1 顺序控制的概念及状态转移图3.1.1 顺序控制简介机械设备的动作过程大多数是按工艺要求预先设计的逻辑顺序或时间顺序的工作过程,即在现场开关信号的作用下,启动机械设备的某个机构动作后,该机构在执行任务中发出另一现场开关信号,继而启动另一机构动作,如此按步进行下去,直至全部工艺过程结束,这种由开关元件控制的按步控制方式,称为顺序控制。
我们先看一个例子:三台电动机顺序控制系统。
要求:按下按钮SB1,电动机1启动;当电动机1启动后,按下按钮SB2,电动机2启动;当电动机2启动后,按下按钮SB3,电动机3启动;当三台电动机启动后,按下按钮SB4,电动机3停止;当电动机3停止后,按下按钮SB5,电动机2停止;当电动机2停止后,按下按钮SB6,电动机1停止。
三台电动机的启动和停止分别由接触器KM1、KM2、KM3控制。
图3-1为电动机控制流程图、PLC 接线图及电气控制原理图。
PLCLN PE COM X0X1X2X3X4X5X624V+COM1COM2Y1Y0Y2Y3Y4Y5Y6Y7~220V~220VSB1KM1SB2SB3SB4SB5SB6KM2KM3a )控制流程图b )PLC 接线及电气控制原理图图3-1 电动机控制流程图、PLC 接线图及电气控制原理图使用基本指令编制的PLC 梯形图程序如图3-2图3-2 三台电动机顺序控制梯形图从图3-3中可以看出,为了达到本次的控制要求,图中又增加了三只辅助继电器,其功能读者可自行分析。
用梯形图或指令表方式编程固然广为电气技术人员接受,但对于一个复杂的控制系统,尤其是顺序控制程序,由于内部的联锁、互动关系极其复杂,其梯形图往往长达数百行,通常要由熟练的电气工程师才能编制出这样的程序。
另外,如果在梯形图上不加上注释,则这种梯形图的可读性也会大大降低。
3.1.2 状态转移图基于经验法和基本指令编写复杂程序的缺点,人们一直寻求一种易于构思、易于理解的图形程序设计工具。



PLC步进顺控指令的应用-1虽然该类的题目见的很多,可是好象讲清楚的并没见到。
就是本人来讲,也是看了很久都无法清楚。
故才下决心搞懂它。
差不多花了一天多时间才明白它的道理,它并不复杂,而且很好画梯形图和编程。
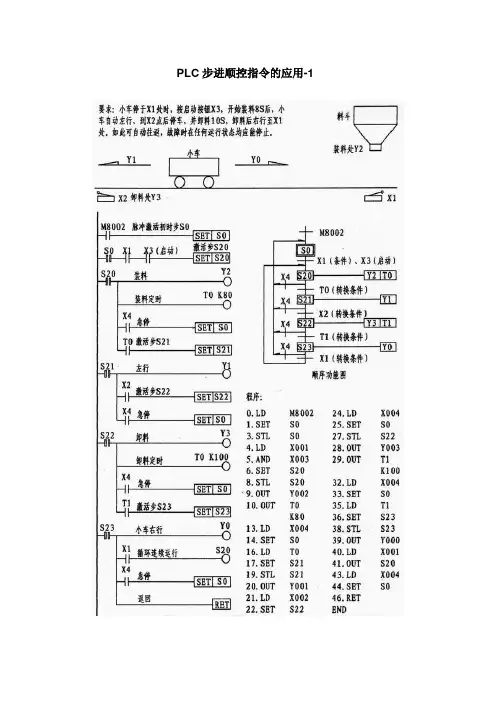
顺控实际是按照生产工艺要求而规定的一定操作顺序而已。
首先要根据生产工艺要求,画出顺序功能图,然后根据功能图再画出梯形图。
上图即为顺序功能图:图中双框S0表示为初始步,单框中的S20、S21、S22、S23依次根据工艺顺序要求而设置的各活动步。
我们来看S0初始步上方垂线上设有M8002其为初始步激活的条件(该步的意思不妨可以理解为自动合上空开?),在S0步与S20步之间有X1、X3,它说明只有符合这二条件要求后,步才能从S0步转移到S20步,而当S20步处于活动状态时Y002、T0处于动作状态。
而S20步与S21步之间的T0,它受时间控制,只要时间一到,S21步被激活投入,使Y001处于工作,同时S20步则处于关闭(其控制的Y002、T0则停止)以下各步中的X2、T1、X1含意均同(均为转换条件),但要注意下一步被激活,其相应控制元件则动作,意味着上一步被停止。
而各步之间均插入了X4其箭头均指向初始步S0,即恢复处于初始状态,X4在这地方的作用是急停。
而步S23下的X1条件一符合,可转入步S20,即处于循环状态。
根据顺序功能图就可很方便地将它转换成梯形图。
梯形图如上图所示,其工作过程如下:第一梯级中的0、LD M8002:M8002为特殊辅助继电器的常开触点,其作用仅在PLC通电瞬间接通。
1、SET S0: SET为置位指令,功能是驱动线圈,并使其具有自保功能。
也就是说在PLC通电的瞬间M8002产生一脉冲,将状态元件S0激活(并自保持)。
第二梯级中最左侧的3、STL S0:STL为步进触点指令,功能为步进触点驱动,当上一步(1、SET S0)为置位时该接点闭合,4、LD X001为小车停止位置的必要条件,也就是说小车开始时必须停在X1位置(该接点才能闭合),此时按外部的按钮(SB1)从而驱动(5、AND X003)的闭合,程序才能执行,这就是所说的条件。
第三章步进顺控指令说明及应用
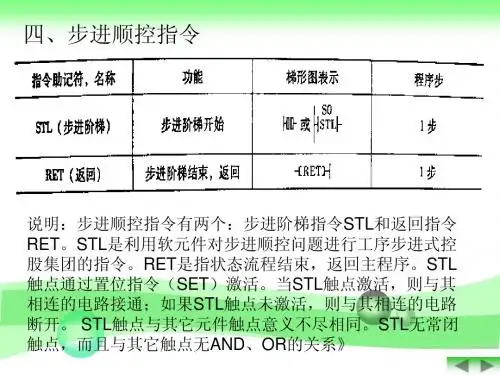
指令解说
步进控制方式(STL)是将控制被划分为多个工序状态(S),依据条件进行状态转移(SET ),逐步完成控制过程。
步进控制方式的特点是将复杂控制分步后,分别考虑好每一步的控制,从而降低了各步的关联,降低编程的复杂程度。
各状态内执行的动作由梯形图其它指令编写。
STL是一个步序动作的开始指令。
RET是一个步序动作的结束指令,其后指令返回母线。
●SET S i 是STL状态发生转移的唯一指令
●规定:子程序内不能使用STL----RET指令。
●当前状态(S0)向下一个状态(S1)转移时,该扫描周期
两个状态内的动作均得到执行;下一扫描周期执行时,当
前状态(S0)被下一状态(S1)所复位,当前状态(S0)
内的所有动作不被执行,所有OUT元件的输入均被断开。
●步序与步序之间一般省去RET,因此看起来是多个STL
可共用一个RET。
有STL而没有RET,程序检查出错。
3.1.2 编程示例
●步序与步序之间一般省去RET,因此看起来是多个STL
可共用一个RET。
有STL而没有RET,程序检查出错。
●状态转移只能用SET指令,不能用OUT指令。
●使用OUT S时,S作为辅助继电器使用,而不是状态寄存
器。
●时间继电器T可重复使用,但相邻两个状态不能重复使用
同一时间继电器。
●两个矛盾继电器输出时,必需加软件互锁。
考虑软件快于
硬件,相矛盾的硬件输出也必需互锁。
●允许同一继电器在不同状态下输出,其实际输出视状态转
移的位置确定。
单一流程示例
示例说明:
该程序描述一个自行葫芦自进入工位到走出工位的步序过程,若在葫芦升降过程中发生停电,来电后继续停电前的动作,并保证升或降动作总时间不变。
S500---S503为停电保持型状态寄存器;C100---C101为停电保持型计数器;
T0延时2秒,作信号确认用;T1作为500 ms脉冲发生器;
X0=ON时,表示工位上停有自行葫芦;
T0=ON时,表明工位上无自行葫芦;因信号由滑触线供给,因而X0=OFF时,不一定确定工位无车,需延时确认。
Y0为驱动进车;Y1驱动葫芦下降;Y2驱动葫芦上升。
选择性分支与汇合示例
在步进顺控指令中,多个条件均可导致状态转移,但多个条件是互斥的,当一个条件成立时,另外条件便不能成立。
这样的分支是选择性分支。
各选择性分支最终进行到一个共同的状态,我们称这一过程为选择性分支的汇合。
选择性分支分支数规定不能超过8路。
示例说明:
如产品输送线上有A、B两种产品,当机械手识别为A类产品时,进入A类流程处理;若识别为B类产品,进入B类流程处理,处理完后,放回输送线,进入下一工序。
流程示意图:
梯形图:
3.2.3 并行分支与汇合示例
在步进顺控指令中,一个条件导致多个状态发生,每个状态都按自已的流程独立进行状态转移,这些各自独立的状态流程称步进指令的并行分支。
多个同时独立进行状态转移的分支,当各分支状态同时有效时,整体才能进行到下一状态,我们称这一过程为并行分支的汇合。
并行分支汇合梯形图上表示为多个状态连续使用STL指令,连续使用STL的个数就是并行分支汇合的支路数。
连续使用STL的个数规定不超过8个。
示例说明:
三条独立的产品线上,分别生产A、B、C三类产品,但包装入库必须按30件A、20件B、10件C组成一个包装。
当任一产品数量不够时就不能构成一个包装。
流程示意图:
梯形图:
3.2.4 循环和跳转示例
实际使用过程中,常常涉及到很多混合形式,如:
选择性分支导致循环(第一个循环)和跳转(进入一个新的循环)。
而每个大的循环内又有并行分支和汇合情况。
示例说明:
一个简易保安系统,在规定次数(如5次)的范围内,若密码不正确将启动报警系统,并关闭安全通道。
若规定的次数内密码正确,进入密级操作。
流程示意图:
梯形图:。