汽车前轮梯形转向机构说明书
- 格式:pdf
- 大小:899.24 KB
- 文档页数:23
机械原理与设计训练I ——汽车前轮转向机构说明书目录设计题目 (2)设计要求 (2)设计内容(原始数据) (3)第一题 (3)第二题 (3)思考题 (7)第三题 (9)第四题 (10)参考资料 (12)机构简介汽车的前轮转向,是通过等腰梯形机构ABCD 驱使前轮转动来实现。
其中,两前轮分别与两摇杆AB 、CD 相连,如下图所示。
当汽车沿直线行驶时(转弯半径R =∞),左右两轮轴线与机架AD 成一条直线;当汽车转弯时,要求左右两轮(或摇杆AB 与CD )转过不同的角度αβ、。
理论上希望前轮两轴延长线的交点P 始终能落在后轮轴的延长线上。
这样,整个车身就能绕P 点转动,使四个轮子都能与地面形成纯滚动,以减少轮胎的磨损。
因此,根据不同的转弯半径R (汽车转向行驶时,各车轮运行轨迹中最外侧车轮滚出的圆周半径),就要求左右两轮轴线(AB 、CD )分别转过不同的角度α和β,其关系如下:如图所示为汽车右拐时: tan /()L R d B β=-- , tan /()L R d α=- 所以α和β的函数关系为: cot cot /B L αβ-=同理,当汽车左拐时,由于对称性,有cot cot /B L βα-=,故转向机构ABCD 的设计应尽量满足以上转角要求。
二、设计要求设计数据见下表。
要求汽车沿直线行驶时,铰链四杆机构左右对称,以保证左右转弯时具有相同的特性。
该转向机构为等腰梯形双摇杆机构,设计此铰链四杆机构。
参数 轴距 轮距 最小转弯半径 销轴到车轮中心的距离符号 L B min R d单位 mm mm mm mm 型号 涂乐GRX 2900 1605 6100 400涂乐GL 2900 1555 6100 400尼桑公爵 2800 1500 5500 500现选择第二组数据进行解答1)根据转弯半径min R 和max R =∞(直线行驶),求出理论上要求的转角α和β的对应值。
要求最少2组对应值。
解: 当L=2900,B=1555,R min =6100,d=400时, 根据公式 tan /()L R d B β=-- tan /()L R d α=-解得:⎩⎨⎧=︒==︒=0.61rad34.9847rad.097.26min min βα当L=2900,B=1555,R ∞=9000,d=400时, 根据公式 tan /()L R d B β=-- tan /()L R d α=- 解得:⎩⎨⎧=︒==︒=0.39rad 37.2233rad.063.1890009000βα2)用解析法设计铰链四杆机构ABCD ,满足以下条件:①最小转弯半径min R 所对应的α和 β满足P 点落在后轴延长线上的要求;②其他各组α和β尽可是能使P 点落在后轴延 长线上;③尽可能满足直线行驶时机构左右对称的附加要求。
5.5转向梯形机构确定、计算及优化转向梯形有整体式和断开式两种,选择整体式或断开式转向梯形方案与悬架采用何种方案有联系。
无论采用哪一种方案,必须正确选择转向梯形参数,做到汽车转弯时,保证全部车轮绕一个瞬时转向中心行驶,使在不同圆周上运动的车轮,作无滑动的纯滚动运动。
同时,为达到总体布置要求的最小转弯直径值,转向轮应有足够大的转角。
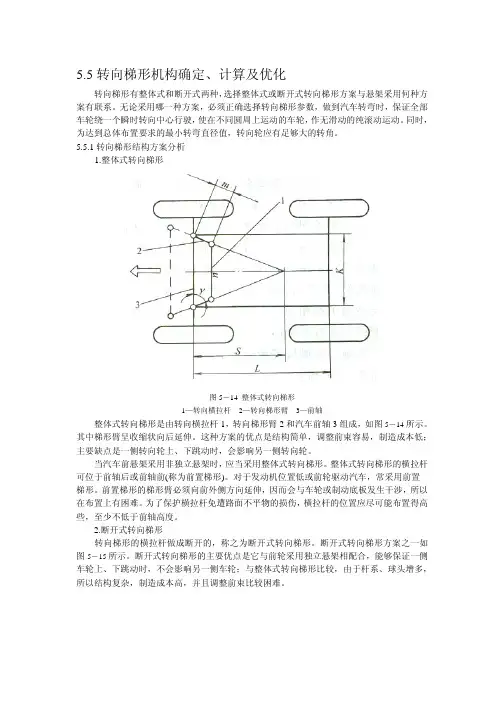
5.5.1转向梯形结构方案分析1.整体式转向梯形图5-14 整体式转向梯形1—转向横拉杆2—转向梯形臂3—前轴整体式转向梯形是由转向横拉杆1,转向梯形臂2和汽车前轴3组成,如图5-14所示。
其中梯形臂呈收缩状向后延伸。
这种方案的优点是结构简单,调整前束容易,制造成本低;主要缺点是一侧转向轮上、下跳动时,会影响另一侧转向轮。
当汽车前悬架采用非独立悬架时,应当采用整体式转向梯形。
整体式转向梯形的横拉杆可位于前轴后或前轴前(称为前置梯形)。
对于发动机位置低或前轮驱动汽车,常采用前置梯形。
前置梯形的梯形臂必须向前外侧方向延伸,因而会与车轮或制动底板发生干涉,所以在布置上有困难。
为了保护横拉杆免遭路面不平物的损伤,横拉杆的位置应尽可能布置得高些,至少不低于前轴高度。
2.断开式转向梯形转向梯形的横拉杆做成断开的,称之为断开式转向梯形。
断开式转向梯形方案之一如图5-15所示。
断开式转向梯形的主要优点是它与前轮采用独立悬架相配合,能够保证一侧车轮上、下跳动时,不会影响另一侧车轮;与整体式转向梯形比较,由于杆系、球头增多,所以结构复杂,制造成本高,并且调整前束比较困难。
图5-15断开式转向梯形横拉杆上断开点的位置与独立悬架形式有关。
采用双横臂独立悬架,常用图解法(基于三心定理)确定断开点的位置。
其求法如下(图5-16b):1)延长与,交于立柱AB 的瞬心P 点,由P 点作直线PS 。
S 点为转向节臂球销中心在悬架杆件(双横臂)所在平面上的投影。
当悬架摇臂的轴线斜置时,应以垂直于摇臂轴的平面作为当量平面进行投影和运动分析。
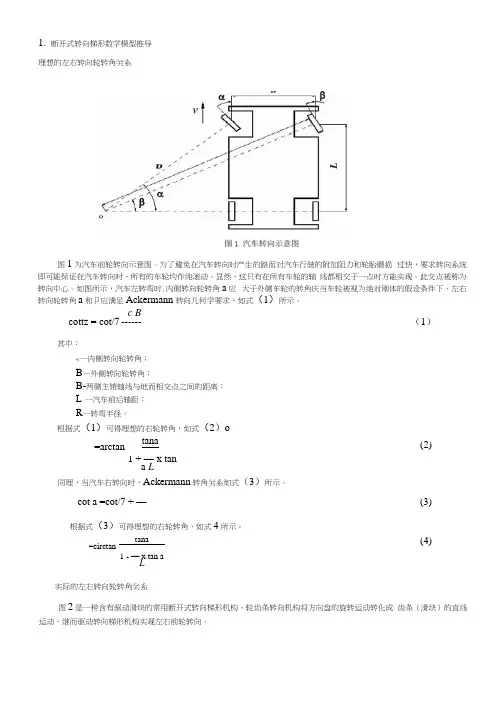
1.断开式转向梯形数学模型推导理想的左右转向轮转角关系图1为汽车前轮转向示意图。
为了避免在汽车转向时产生的路而对汽车行驶的附加阻力和轮胎磨损过快,要求转向系统即可能保证在汽车转向时,所有的车轮均作纯滚动。
显然,这只有在所有车轮的轴线都相交于一点时方能实现。
此交点被称为转向中心。
如图所示,汽车左转弯时.内侧转向轮转角a应大于外侧车轮的转角庆当车轮被视为绝对刚体的假设条件下,左右转向轮转角a和卩应满足Ackermann 转向几何学要求,如式(1)所示。
c Bcottz = cot/7 ------ (1)其中:«一内侧转向轮转角;B—外侧转向轮转角;B-两侧主销轴线与地而相交点之间的距离:L 一汽车前后轴距:R—转弯半径。
根据式(1)可得理想的右轮转角,如式(2)otana (2) =arctan1 + — x tana L同理,当汽车右转向时,Ackermann转角关系如式(3)所示。
(3)cot a =cot/7 + —根据式(3)可得理想的右轮转角,如式4所示。
tana(4)=circtan1 - — x tan aL实际的左右转向轮转角关系图2是一种含有驱动滑块的常用断开式转向梯形机构。
轮齿条转向机构将方向盘的旋转运动转化成齿条(滑块)的直线运动,继而驱动转向梯形机构实现左右前轮转向。
图中:厶一转向机齿条左右球较中心的距离;L 2 一左右横拉杆的长度;厶一左右转向节臂的长度:厶•一车轮中心至转向主销的距离:S] —转向齿条从中心位置向左的位移量: s 2 一转向齿条从中心位宜向左的位移量:y —转向齿条左右球狡中心连线与左右转向主销中心连线之偏距,图示位置取正值,反之取负值: S 。
一直线行驶时,转向齿条左球钱中心和左转向主销的水平距离:一转向节骨与汽车纵轴线的夹角。
运用余弦泄理和三角函数变换公式,经推导可得: ______________________-Cv - S xcos a = cos (ZAOB + Z.BOY )= 一;----- - ------------2厶(丁 +尸)A 点的坐标值为:v CxS-yx>jA 2 + B 2-C 2B2x (/+r )2*…Cxy + SxyjA 2 + B 2-C 2 沧=_ ------------- —zn ----------2x (/+S') 其中:A = -2LyxS,B = _2厶xy,C = 15,-1^-y 2-~s\ F —表示转向齿条弐球钱中心和左转向主销中心的实际距藹,对于直线行驶时,g = S 。
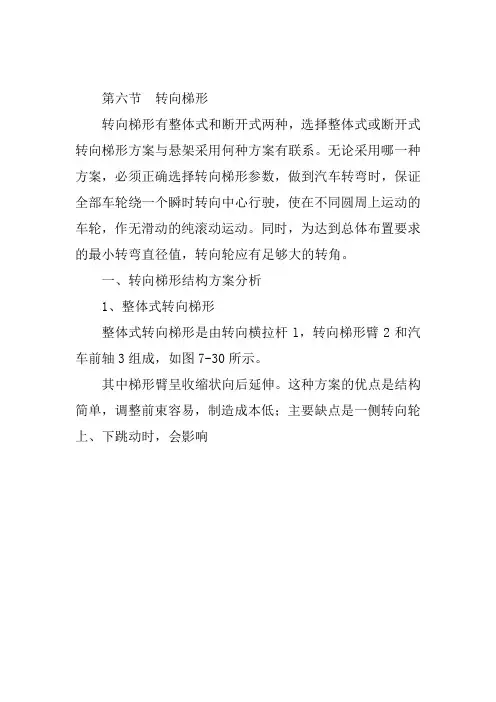
第六节转向梯形转向梯形有整体式和断开式两种,选择整体式或断开式转向梯形方案与悬架采用何种方案有联系。
无论采用哪一种方案,必须正确选择转向梯形参数,做到汽车转弯时,保证全部车轮绕一个瞬时转向中心行驶,使在不同圆周上运动的车轮,作无滑动的纯滚动运动。
同时,为达到总体布置要求的最小转弯直径值,转向轮应有足够大的转角。
一、转向梯形结构方案分析1、整体式转向梯形整体式转向梯形是由转向横拉杆l,转向梯形臂2和汽车前轴3组成,如图7-30所示。
其中梯形臂呈收缩状向后延伸。
这种方案的优点是结构简单,调整前束容易,制造成本低;主要缺点是一侧转向轮上、下跳动时,会影响图7—30 整体式转向梯形1—转向横拉杆 2—转向梯形臂 3—前轴另一侧转向轮。
当汽车前悬架采用非独立悬架时,应当采用整体式转向梯形。
整体式转向梯形的横拉杆可位于前轴后或前轴前(称为前置梯形)。
对于发动机位置低或前轮驱动汽车,常采用前置梯形。
前置梯形的梯形臂必须向前外侧方向延伸,因而会与车轮或制动底板发生干涉,所以在布置上有困难。
为了保护横拉杆免遭路面不平物的损伤,横拉杆的位置应尽可能布置得高些,至少不低于前轴高度。
2、断开式转向梯形转向梯形的横拉杆做成断开的,称之为断开式转向梯形。
断开式转向梯形方案之一如图7-31所示。
断开式转向梯形的主要优点是它与前轮采用独立悬架相配合,能够保证一侧车轮上、下跳动时,不会影响另一侧车轮;与整体式转向梯形比较,由于杆系、球头增多,所以结构复杂,制造成本高,并且调整前束比较困难。
图7—31 断开式转向梯形横拉杆上断开点的位置与独立悬架形式有关。
采用双横臂独立悬架,常用图解法(基于三心定理)确定断开点的位置。
其求法如下(图7-32b):1)延长B K B 与A K A ,交于立柱AB 的瞬心P 点,由P 点作直线PS 。
S 点为转向节臂球销中心在悬架杆件(双横臂)所在平面上的投影。
当悬架摇臂的轴线斜置时,应以垂直于摇臂轴的平面作为当量平面进行投影和运动分析。
转向梯形机构优化设计课程设计题目:汽车转向梯形臂优化设计指导老师:郭朋彦华北水利水电大学转向梯形的优化设计.1. 向梯形机构概述⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯32.整体式向梯形构方案分析⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3整体式向梯形机构化分析⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯4整体式向梯形程序写⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯7转动传动机构强度计算⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯12转向梯形的优化结果⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯13转向梯形结构设计图形⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯13结论⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯15;.转向梯形机构优化设计方案一、转向梯形机构概述转向梯形机构用来保证汽车转弯行驶时所有车轮能绕一个瞬时转向中心,在不同的圆周上做无滑动的纯滚动。
设计转向梯形的主要任务之一是确定转向梯型的最正确参数和进行强度计算。
一般转向梯形机构布置在前轴之后,但当发动机位置很低或前轴驱动时,也有位于前轴之前的。
转向梯形有整体式和断开式两种,选择整体式或断开式转向梯形方案与悬架采用何种方案有联系。
无论采用哪一种方案,必须正确选择转向梯形参数,做到汽车转弯时,保证全部车轮绕一个瞬时转向中心行驶,使在不同圆周上运动的车轮,作无滑动的纯滚动运动。
同时,为到达总体布置要求的最小转弯直径值,转向轮应有足够大的转角。
二、整体式转向梯形结构方案分析图整体式转向梯形;.1—转向横拉杆2—转向梯形臂3—前轴整体式转向梯形是由转向横拉杆1,转向梯形臂2和汽车前轴3组成,如图所示。
其中梯形臂呈收缩状向后延伸。
这种方案的优点是结构简单,调整前束容易,制造本钱低;主要缺点是一侧转向轮上、下跳动时,会影响另一侧转向轮。
当汽车前悬架采用非独立悬架时,应当采用整体式转向梯形。
整体式转向梯形的横拉杆可位于前轴后或前轴前(称为前置梯形)。
对于发动机位置低或前轮驱动汽车,常采用前置梯形。
前置梯形的梯形臂必须向前外侧方向延伸,因而会与车轮或制动底板发生干预,所以在布置上有困难。
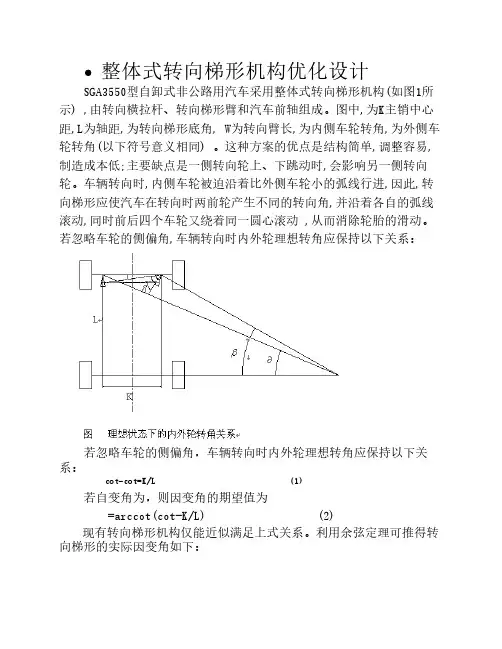
整体式转向梯形机构优化设计SGA3550型自卸式非公路用汽车采用整体式转向梯形机构(如图1所示) ,由转向横拉杆、转向梯形臂和汽车前轴组成。
图中,为K主销中心距,L为轴距,为转向梯形底角, W为转向臂长,为内侧车轮转角,为外侧车轮转角(以下符号意义相同) 。
这种方案的优点是结构简单,调整容易,制造成本低;主要缺点是一侧转向轮上、下跳动时,会影响另一侧转向轮。
车辆转向时,内侧车轮被迫沿着比外侧车轮小的弧线行进,因此,转向梯形应使汽车在转向时两前轮产生不同的转向角,并沿着各自的弧线滚动,同时前后四个车轮又绕着同一圆心滚动 ,从而消除轮胎的滑动。
若忽略车轮的侧偏角,车辆转向时内外轮理想转角应保持以下关系:若忽略车轮的侧偏角,车辆转向时内外轮理想转角应保持以下关系:cot-cot=K/L (1)若自变角为,则因变角的期望值为=arccot(cot-K/L) (2)现有转向梯形机构仅能近似满足上式关系。
利用余弦定理可推得转向梯形的实际因变角如下:图2(3)(4)(5)(6)由(4)(5)(6)式得出(7)(8)由(3)(7)(8)式得出:实际因变角要求:(1) 列出转向机构的优化数学模型(2) 已知轮距2900mm;轴距L= 3800 mm;主销中心距K= 2100 mm;用Matlab中lsqcurvefit(……)函数或lsqnonlin(……)函数进行优化,求取设计变量梯形底角的值(要求底角范围在60-90度之间),转向梯形臂长度的值(要求在250-450mm之间)以满足设计需求。
该优化问题可以看作是将理想的内外转向轮曲线同待优化的内外转向轮角度关系进行拟合,MATLAB优化工具箱中提供了几种可供选择的优化函数:(1) [x,resnorm]=lsqcurvefit(fun,x0,xdata,ydata,lb,ub),该函数是进行非线性曲线的二次拟合。
其中F(x)为待优化的函数,数学模型为:(2) [x,resnorm]=lsqnonlin(……),该函数求解非线性最小二乘问题,包括非线性数据拟合问题。
双前桥重型汽车转向梯形双前车转向机构转向梯形设计姜虎波(交通学院交通运输专业 2006级交本0601班 062813929)摘要:随着运输业的发展,双前桥重型汽车在实际应⽤中越来越⼴泛,⽽双前桥重型汽车的转向系是实现汽车灵活转向以及减⼩轮胎磨损的重要机构。
本⽂着重介绍了双前桥转向机构的转向梯形,推导了双前桥转向梯形的空间运动关系式,优化了转向梯形的设计模型。
关键词:双前桥; 转向梯形; 运动学分析; 优化The design of Double-front-axle Steering System in HeavyTruckJiang Hubo(School of Transportation, Communications and Transportation,Jiaoben0601 Grade2006, 062813929)Abstract: with the developing of the transportation, the Heavy Truck of Double-front-axle is more and more widely in practice, and Double-front-axle Steering System in Heavy Truck is the important mechanism which can achieve automotive steering and reduce tire wear. I introduce the Ackerman steering Double-front-axle Steering System in the treatise, deduce the space motion formula of the Ackerman steering Double-front-axle Steering System and make the Ackerman steering model design optimization.Key words:Double-front-axle; the Ackerman steering; The Kinematics Analysis; optimization1 引⾔1.1 转向梯形的提出在1817年,⼀个叫林肯斯潘杰的德国⼈提出了类似现代汽车的转向⽅式,将前轮⽤转向节与前梁连接。
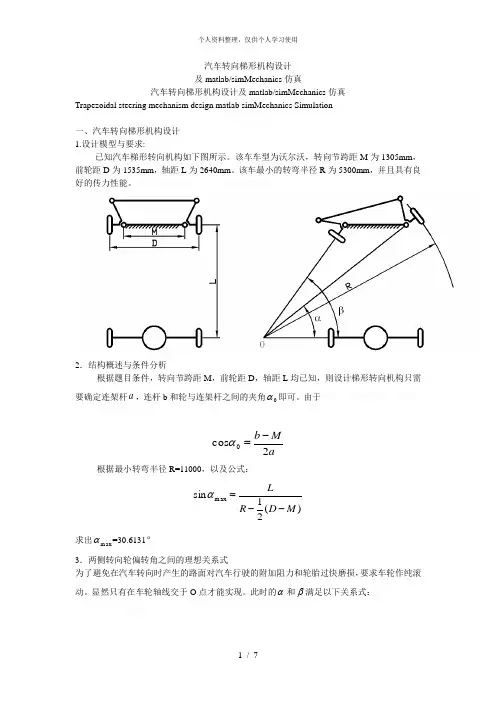
汽车转向梯形机构设计及matlab/simMechanics 仿真汽车转向梯形机构设计及matlab/simMechanics 仿真Trapezoidal steering mechanism design matlab simMechanics Simulation 一、汽车转向梯形机构设计1.设计模型与要求:已知汽车梯形转向机构如下图所示。
该车车型为沃尔沃,转向节跨距M 为1305mm ,前轮距D 为1535mm ,轴距L 为2640mm 。
该车最小的转弯半径R 为5300mm ,并且具有良好的传力性能。
2.结构概述与条件分析根据题目条件,转向节跨距M ,前轮距D ,轴距L 均已知,则设计梯形转向机构只需要确定连架杆a ,连杆b 和轮与连架杆之间的夹角0α即可。
由于aM b 2cos 0-=α 根据最小转弯半径R=11000,以及公式:)(21sin max M D R L--=α求出m ax α=30.61313.两侧转向轮偏转角之间的理想关系式为了避免在汽车转向时产生的路面对汽车行驶的附加阻力和轮胎过快磨损,要求车轮作纯滚动。
显然只有在车轮轴线交于O 点才能实现。
此时的α和β满足以下关系式:LM +=βαcot cot 为此要精心地确定转向梯形机构的参数。
实际设计中,所有汽车的转向梯形都只能设计得再一定的车轮偏转角范围内,使两侧车轮偏转角的关系大体上接近于理想关系。
4.转向传动机构的优化设计4.1 传动机构连架杆与车轮轴线夹角0α的确定根据经验公式:︒±=5)34arctan(0ML α 带入数据得 0α=67.4161︒~77.4161︒,初步设计取的是72︒。
4.2 理论曲线与实际曲线焦点位置的确定以及连架杆a 的确定根据经验得交点一般发生在0.8m ax α~0.95m ax α=24.49°~29.0824°之间,实验中取α=26︒。
此时实际理论ββ==)tan tan arctan(ααM L L -=32.728°,带入实际公式,则可以确定连架杆a 值。
汽车转向梯形机构图解解析————————————————————————————————作者:————————————————————————————————日期:轮式车辆转向梯形结构的图解解析常州工业技术学院钨华芝常州市政工程管理处魏晓静摘要介绍几种简单实用的车辆转向梯形结构的图解解析设计法。
通过事先设定内、外转向轮实际特性曲线与理论特性的交点位置来控制转角偏差的方法,选择转向梯形机构参数,可以大大减少图次数,提高工作效率,减小转角误差。
关键词:转向梯形机构解析图解1 引言轮式车辆一般都是依靠转向车轮偏转一个角度来实现转弯或曲线行驶。
转向是的基本要求是保证所有车轮滚动而不发生滑动,这一要求通常由平面四杆机构来达到。
传统的设计都采用图解转向梯形的方法。
这种方法需要按经验数据选择机构的几何参数,然后作图校核该梯形机构在运动过程中转向轮的转角偏差是否大于允许偏差,若大于允许偏差,则重新选择或调整几何参数,再校核图,直至转角偏转小于允许偏差为止。
这实际上是一种试凑的方法,带有较大的盲目性,工作量大。
随着计算机的发展,解析法得到了较好的应用,但是传统的图解法仍有它直观、方便的优点,因此仍然被工程设计人员广泛采用。
本文介绍一种简单高效且实用的图解解析设计法,可以大大减少作图校核的次数,提高工作效率。
2 转向理论特性机动车辆或装卸搬运车辆的转向大多采用双轴线式转向方式,见图1。
为了满足纯滚动条件,转向时所有车轮必须以不同的半径围绕同一转向中心滚动,各个车轮的轴线交于瞬时转向中心O点。
虽然两个转向轮偏转的角度不同,但是两个转角之间应满足下列几何关系:ctgß-ctga=M/L (1)式中ß-外轮转角 a-内轮转角 M-转向轴两主销中心距 L-车辆前后轴轴距为了满足运动学上的这一几何关系,一般都是通过设计转向梯形机构来实现的。
式(1)称为转向理论特性。
3 转向梯形的图解设计及其转角误差转向梯形四杆机构中,固定件长度(两主销中心距)M是由车辆总体设计给出的,两梯形臂长相等。
序号名称单位数值1轮距 M mm 12462轴距 L mm 22003油缸偏距 h mm 904油缸杆长 k mm 9805转向臂长 b mm 1606梯形底角 θ0°907辅助臂长 a mm 150150.38滑动摩擦系数 ψ0.79滚动摩擦系数 f 0.0210基距 e mm 13311最大内转角αmax °88.36类别行程x(mm)内转辅助角θ11(°)cos θ12外转辅助角θ21(°)cos θ22x≤e13390.000.3918.690.9x>e 13893.180.3918.370.93310.00计算值285.55TRUE极限位置臂长(b+a)1、转向节臂长b略 缸行程也大,可能布置不下,无 而行程太富裕。
2、转向节臂初始角θ0,可能在90度 92度,基距变大,要根据和轮辋3、基距D,该参数对于机构特性不敏4、油缸偏距h,该参数对于机构特性 行精确调整,以便获得最佳机构曲柄滑块式横置油缸式mm 175mm 150°49.49m 2.28m 3.14内转角α(°)外转角β(°)理论外转角β0(°)绝对值差△β(°)相对偏差△β/β0(%)67.1147.1045.33 1.76 3.970.2849.4947.242.26 4.8臂长b略小于双梯形机构,可取0.11-0.145m,b大则机构行程大,相应的油缸行程也大,可能布置不下,无法实现,R1小则机构受力大,相应的油缸受力大,而行程太富裕。
转向节臂初始角θ0,可能在90度左右,θ0越大,则机构特性越好,有时会取到92度,基距变大,要根据和轮辋是否干涉来决定,该参数先确定。
基距D,该参数对于机构特性不敏感,约等于转向节臂长,他也和油缸的行程有关。
油缸偏距h,该参数对于机构特性十分名,取值大约为转向节臂的一半左右,应进行精确调整,以便获得最佳机构特性。
转向梯形机构设计报告一、引言梯形机构是一种常用于机械设计中的传动机构,可以将旋转运动转化为直线运动,被广泛应用于工程领域中各种机械装置中。
本报告主要介绍了梯形机构的设计原理、结构特点、选择和使用要点等内容。
二、设计原理梯形机构基本原理是通过两个或多个滚轮和一个传动带或链条来实现转动轴的运动。
其中,滚轮被安装在不同的位置,并用传动带或链条连接。
当驱动滚轮旋转时,传动带或链条会从一个滚轮滑落到另一个滚轮上,从而产生直线运动。
三、结构特点1.简单稳定:梯形机构结构简单,同时能够提供稳定的直线运动。
2.传动效率高:梯形机构传动效率较高,可满足大部分机械装置的需求。
3.负载能力强:梯形机构具有较高的负载能力,能够承担一定程度的重量。
4.调节方便:梯形机构可以通过调整滚轮的位置和传动带或链条的张紧度来实现不同的运动需求。
四、选择和使用要点1.根据需求选择合适的滚轮:在梯形机构设计中,滚轮的选择非常重要。
滚轮的尺寸、材质和表面处理等因素直接影响着梯形机构的运行效果和寿命。
2.合理布置滚轮位置:滚轮应该根据具体要求合理布置,保证滚轮之间的转动配合准确,同时还需要考虑机械装置的空间布局和传动路径等因素。
3.选择合适的传动带或链条:传动带或链条的选择应该符合工作环境的要求,能够承受工作负载和运动速度,同时还要考虑传动带或链条的寿命和维护成本等因素。
4.保持传动带或链条的张紧度:传动带或链条的张紧度对梯形机构的运行效果和寿命影响很大,应该定期检查和调整传动带或链条的张紧度,确保其正常工作。
五、案例分析以自动贩卖机中的货物下降装置为例,使用梯形机构实现货物从上方下降到出货口的运动。
在该案例中,根据贩卖机的设计要求,选择合适尺寸和负载能力的滚轮,并合理布置滚轮的位置。
通过调整传动带的张紧度,确保货物的平稳下降和定位准确。
六、结论梯形机构作为一种常用的传动机构,具有简单稳定、传动效率高、负载能力强等特点,在机械设计中应用广泛。
汽车转向梯形机构图解解析(总6页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除轮式车辆转向梯形结构的图解解析常州工业技术学院钨华芝常州市政工程管理处魏晓静摘要介绍几种简单实用的车辆转向梯形结构的图解解析设计法。
通过事先设定内、外转向轮实际特性曲线与理论特性的交点位置来控制转角偏差的方法,选择转向梯形机构参数,可以大大减少图次数,提高工作效率,减小转角误差。
关键词:转向梯形机构解析图解1 引言轮式车辆一般都是依靠转向车轮偏转一个角度来实现转弯或曲线行驶。
转向是的基本要求是保证所有车轮滚动而不发生滑动,这一要求通常由平面四杆机构来达到。
传统的设计都采用图解转向梯形的方法。
这种方法需要按经验数据选择机构的几何参数,然后作图校核该梯形机构在运动过程中转向轮的转角偏差是否大于允许偏差,若大于允许偏差,则重新选择或调整几何参数,再校核图,直至转角偏转小于允许偏差为止。
这实际上是一种试凑的方法,带有较大的盲目性,工作量大。
随着计算机的发展,解析法得到了较好的应用,但是传统的图解法仍有它直观、方便的优点,因此仍然被工程设计人员广泛采用。
本文介绍一种简单高效且实用的图解解析设计法,可以大大减少作图校核的次数,提高工作效率。
2 转向理论特性机动车辆或装卸搬运车辆的转向大多采用双轴线式转向方式,见图1。
为了满足纯滚动条件,转向时所有车轮必须以不同的半径围绕同一转向中心滚动,各个车轮的轴线交于瞬时转向中心O点。
虽然两个转向轮偏转的角度不同,但是两个转角之间应满足下列几何关系:ctg-ctga=M/L (1)式中 -外轮转角 a-内轮转角 M-转向轴两主销中心距 L-车辆前后轴轴距为了满足运动学上的这一几何关系,一般都是通过设计转向梯形机构来实现的。
式(1)称为转向理论特性。
3 转向梯形的图解设计及其转角误差转向梯形四杆机构中,固定件长度(两主销中心距)M是由车辆总体设计给出的,两梯形臂长相等。
载货汽车转向梯形的组成
载货汽车的转向系统是负责控制汽车转向方向和角度的关键部件,梯形是转向系统的重要组成部分,它能够将驾驶员的方向盘旋转的力量传递到车轮上,以实现汽车的转向操作。
梯形转向是一种直接转向机构,主要由转向杆、U型跨杆、普通跨杆、调节杆和连接杆等几个零部件组成。
它的结构简单,维护方便,所以被广泛应用于中小型载货汽车上。
梯形转向的基本原理是:当驾驶员旋转方向盘时,转向杆就会随着方向盘旋转,从而真实反应出驾驶员的操作意图。
同时,转向杆带动U型跨杆和普通跨杆相互配合工作,将方向盘旋转的力量通过转向节传递到前桥的路轮上,实现汽车的实际转向。
调节杆和连接杆的作用是稳定梯形结构,防止震动和不规则转向。
U型跨杆是梯形的核心零部件之一,它是一个基于三角架结构的强度较高、承载能力较强的杆件。
U型跨杆的两个侧面分别与转向杆和普通跨杆相连,其中一个端点通过转向节与车轮相连。
所以,当转向杆旋转时,通过U型跨杆将转向力量传递到普通跨杆中,从而实现前轮的转动。
普通跨杆则是连通两个U型跨杆的杆件,与U型跨杆相连的两个端点都可以旋转,从而实现汽车的可以左右转向。
调节杆和连接杆都是连接各个零部件的固定器材,在梯形转向系统中发挥着重要作用。