轿车前轮主动转向系统机械结构设计
- 格式:doc
- 大小:337.50 KB
- 文档页数:24
汽车前轮转向原理
汽车前轮转向原理是指汽车在行驶过程中,通过转向系统使车辆前轮产生转向运动,从而改变车辆行驶方向的原理。
汽车前轮转向原理的实现,是通过转向系统和悬挂系统共同完成的。
下面将从转向系统和悬挂系统两个方面来详细介绍汽车前轮转向原理。
转向系统是汽车前轮转向的关键部件,它由方向盘、转向齿轮、传动杆、转向节、转向臂、转向销等组成。
当驾驶员通过方向盘施加转向力时,转向齿轮通过传动杆将转向力传递给转向节,再通过转向臂和转向销使车辆前轮产生转向运动。
转向系统通过这样的工作原理,实现了对车辆前轮的控制,从而改变了车辆的行驶方向。
悬挂系统是汽车前轮转向的支撑系统,它由弹簧、减震器、悬挂臂、横拉杆等组成。
在车辆行驶过程中,悬挂系统能够有效地减少路面颠簸对车辆的影响,保证车辆稳定性和行驶舒适性。
同时,悬挂系统还能够根据路面情况对车辆前轮进行调节,使车辆前轮保持与地面的良好接触,从而保证转向系统的正常工作。
汽车前轮转向原理的实现,需要转向系统和悬挂系统的协同配合。
当驾驶员通过方向盘施加转向力时,转向系统将转向力传递给车辆前轮,同时悬挂系统保证车辆前轮与地面的良好接触,从而使车辆前轮产生转向运动,改变车辆的行驶方向。
这样,汽车前轮转向原理就得以实现。
总的来说,汽车前轮转向原理是通过转向系统和悬挂系统的协同配合,使车辆前轮产生转向运动,从而改变车辆行驶方向的原理。
转向系统通过方向盘施加转向力,悬挂系统保证车辆前轮与地面的良好接触,两者共同完成了汽车前轮转向的任务。
汽车前轮转向原理的实现,不仅是汽车行驶的基础,也是驾驶员操控车辆的关键。
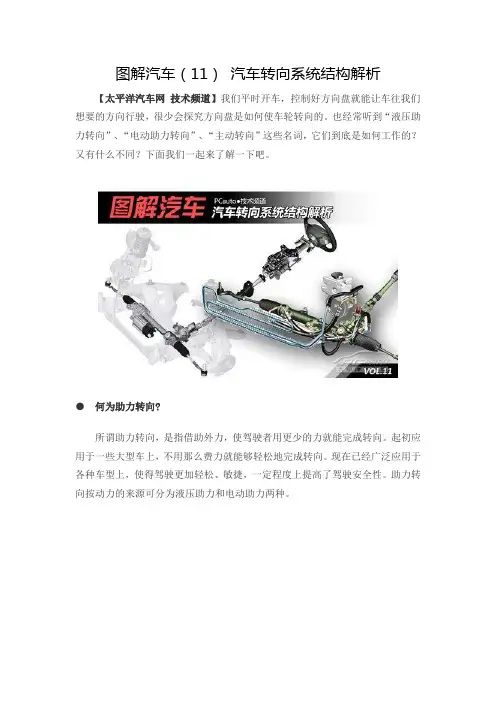
图解汽车(11)汽车转向系统结构解析【太平洋汽车网技术频道】我们平时开车,控制好方向盘就能让车往我们想要的方向行驶,很少会探究方向盘是如何使车轮转向的。
也经常听到“液压助力转向”、“电动助力转向”、“主动转向”这些名词,它们到底是如何工作的?又有什么不同?下面我们一起来了解一下吧。
●何为助力转向?所谓助力转向,是指借助外力,使驾驶者用更少的力就能完成转向。
起初应用于一些大型车上,不用那么费力就能够轻松地完成转向。
现在已经广泛应用于各种车型上,使得驾驶更加轻松、敏捷,一定程度上提高了驾驶安全性。
助力转向按动力的来源可分为液压助力和电动助力两种。
●机械式液压助力转向机械式液压助力系统主要包括齿轮齿条转向结构和液压系统(液压助力泵、液压缸、活塞等)两部分。
工作原理是通过液压泵(由发动机皮带带动)提供油压推动活塞,进而产生辅助力推动转向拉杆,辅助车轮转向。
那具体是怎样动作的呢?首先位于转向机上的机械阀体(可随转向柱转动),在方向盘没有转动时,阀体保持原位,活塞两侧的油压相同,处于平衡状态。
当方向盘转动时,转向控制阀就会相应的打开或关闭,一侧油液不经过液压缸而直接回流至储油罐,另一侧油液继续注入液压缸内,这样活塞两侧就会产生压差而被推动,进而产生辅助力推动转向拉杆,使转向更加轻松。
在液压转向系统中,如车轮的剧烈跳动和遇到坑洼路面导致轮胎出现非自主的转向时,可以通过液压对活塞的作用能够很好的缓冲和吸收震动,使传递到方向盘上的震动大大减少。
机械液压助力技术成熟稳定,可靠性高,应用广泛。
但结构较复杂,维护成本较高。
而且单纯的机械式液压助力系统助力力度不可调节,很难兼顾低速和高速行驶时对指向精度的不同需求。
●电子式液压助力转向电子式液压助力的结构原理与机械式液压助力大体相同,最大的区别在于提供油压油泵的驱动方式不同。
机械式液压助力的液压泵直接是通过发动机皮带驱动的,而电子式液压助力采用的是由电力驱动的电子泵。
电子液压助力的电子泵,不用消耗发动机本身的动力,而且电子泵是由电子系统控制的,不需要转向时,电子泵关闭,进一步减少能耗。
全轮驱动时代AWD轿车的发展及构造(图) 2005年04月07日 18:08 汽车之友ESC、TCS通过控制发动机动力输出和制动系统来保证平稳驾驶,以损失动力作为安全保证以防止超越物理极限;AWD控制并调整每个车轮的扭矩输出,在不干涉发动机动力输出的情况下提高了物理极限,保证你全天候的驾驶乐趣奥迪Quattro AWD诞生于1980年,当年奥迪的设计师声称:“早晚有一天,AWD 会像今天4轮盘式刹车一样流行。
”果不其然,今天奥迪用AWD武装了它的每一款车型,而各大厂商也在纷纷加入AWD行列。
车辆的驱动型式有FWD (Front-Wheel Drive)、RWD( Rear-Wheel Drive)、4WD(Four-Wheel Drive)和AWD(All-Wheel Drive)。
我们先来看看这几种驱动型式。
前轮驱动(FWD):今天占轿车产品的70%的经济型及中级轿车都采用了前轮驱动。
就像名字所暗示的,只有前轮传递动力。
安装在前部的发动机将动力直接传输到前轮,提高了牵引效率,60%~70%的重量集中在轿车前部,提供了更好的冰雪稳定性,但前轮要承受75%的制动,而且在急加速时车身重心后移,就会造成加速延迟,在操控上也存在着转向过度和后轮打滑现象。
后轮驱动(RWD):豪华轿车通常采用后驱,重量分配接近于50∶50,提供了更平稳的驾驶。
RWD与FWD驱动情况正相反,操控性能有所提高。
当加速时车身重心向后转移,这正是你所希望的,因为后轮主管牵引力,前轮主管汽车方向。
你还可以在弯道加速。
这并不是说RWD在结构上就好,它也存在缺陷,如从前到后的传动轴(使车内地板从前到后隆起),还有一个很大的差速器在后部,增加了重量和成本,它同样不适应全天候驾驶。
以上两种车型都是只使用了两个车轮传递动力,为什么不同时使用另两个车轮?四轮驱动就是使用了4个车轮传递动力,它又分为4WD和AWD两种形式。
4WD是为了增加牵引力,在不顺利的道路条件下或是追求极限性能驾驶,是专为越野设计的。
浅谈线控转向系统前轮主动转向控制策略摘要:汽车线控转向控制技术去除了汽车中转向车轮与方向盘之间的机械连接,这一技术的推行,有效提升了汽车整体性能,确保车辆操控的稳定性和安全性,有效减轻驾驶员的驾驶负担,是目前汽车领域研究的热点。
关键词:线控技术;汽车前轮主动转向;控制策略1汽车线控转向系统的基本组成1.1.汽车线控转向系统的基本组成汽车线控转向有多种实现方式,例如:前、后轮的线控转向以及四轮的线控转向。
其中前轮的线控转向又被分成多种,比如,汽车运用轮毂对电机形成的牵引力会使绕主销的转向力矩得以产生,实现汽车的转向;或是利用两个相对独立的电机对汽车左右两个轮胎进行驱动,完成阿克曼转角。
当前比较常用的线控转向系统,采用的是转向电机对齿轮齿条转向器驱动的方式,具体结构如图1所示。
关于汽车线控转向系统,主要由控制器、前轮子系统以及转向盘子系统等几个部分组成。
针对控制器,其包含如下算法:转向盘前车轮的转角算法以及正力矩的算法,分别对前轮子系统的协调处理及转向盘子系统加以控制;针对前轮子系统,其包含转向电机等系统,具有如下作用:追踪参考前轮的转角,给转向盘子系统反馈相关信息内容,如汽车行驶状况以及车胎受到外界作用力的实际情况。
图1汽车线控转向系统基本结构2前轮主动转向控制策略2.1前轮转角控制策略分析线控转向系统可以根据车速的变化获得此时的理想传动比,进而获得理想的前轮转角,该方法可以称为基于理想传动比的前馈控制。
这种方法应用在汽车处于稳态工况下具有较好的控制效果。
但在实际的驾驶过程中,汽车也会遇到非稳定工况,所以单单依靠基于理想传动比的前馈控制策略并不能满足汽车运行的多种工况,在此引入基于状态跟踪的反馈控制算法。
2.2前轮主动转向控制策略设计2.2.1理想传动比下的前馈控制算法目前在较多的研究过程中是依据横摆角速度增益不变的前提下获得理想的传动比。
在低速工况下采用该方法较为合理。
然而当汽车高速行驶且失去稳定时很容易发生侧滑和甩尾。

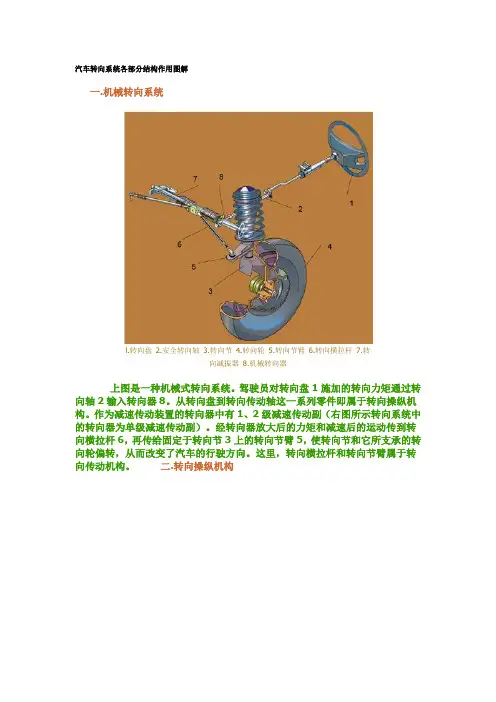
汽车转向系统各部分结构作用图解[ 04-11-8 17:37 ]太平洋汽车网来源: 清华大学CAR 责任编辑: shenyunfeng一.机械转向系统l.转向盘2.安全转向轴3.转向节4.转向轮5.转向节臂6.转向横拉杆7.转向减振器8.机械转向器上图是一种机械式转向系统。
驾驶员对转向盘1施加的转向力矩通过转向轴2输入转向器8。
从转向盘到转向传动轴这一系列零件即属于转向操纵机构。
作为减速传动装置的转向器中有1、2级减速传动副(右图所示转向系统中的转向器为单级减速传动副)。
经转向器放大后的力矩和减速后的运动传到转向横拉杆6,再传给固定于转向节3上的转向节臂5,使转向节和它所支承的转向轮偏转,从而改变了汽车的行驶方向。
这里,转向横拉杆和转向节臂属于转向传动机构。
二.转向操纵机构转向操纵机构由方向盘、转向轴、转向管柱等组成,它的作用是将驾驶员转动转向盘的操纵力传给转向器。
三.机械转向器齿轮齿条式转向器齿轮齿条式转向器分两端输出式和中间(或单端)输出式两种。
1.转向横拉杆2.防尘套3.球头座4.转向齿条5.转向器壳体6.调整螺塞7.压紧弹簧8.锁紧螺母9.压块10.万向节11.转向齿轮轴12.向心球轴承13.滚针轴承两端输出的齿轮齿条式转向器如图d-zx-5所示,作为传动副主动件的转向齿轮轴11通过轴承12和13安装在转向器壳体5中,其上端通过花键与万向节叉10和转向轴连接。
与转向齿轮啮合的转向齿条4水平布置,两端通过球头座3与转向横拉杆1相连。
弹簧7通过压块9将齿条压靠在齿轮上,保证无间隙啮合。
弹簧的预紧力可用调整螺塞6调整。
当转动转向盘时,转向器齿轮11转动,使与之啮合的齿条4沿轴向移动,从而使左右横拉杆带动转向节左右转动,使转向车轮偏转,从而实现汽车转向。
中间输出的齿轮齿条式转向器如图d-zx-6所示,其结构及工作原理与两端输出的齿轮齿条式转向器基本相同,不同之处在于它在转向齿条的中部用螺栓6与左右转向横拉杆7相连。
汽车转向系统各部分结构作用图解一.机械转向系统l.转向盘2.安全转向轴3.转向节4.转向轮5.转向节臂6.转向横拉杆7.转向减振器8.机械转向器上图是一种机械式转向系统。
驾驶员对转向盘1施加的转向力矩通过转向轴2输入转向器8。
从转向盘到转向传动轴这一系列零件即属于转向操纵机构。
作为减速传动装置的转向器中有1、2级减速传动副(右图所示转向系统中的转向器为单级减速传动副)。
经转向器放大后的力矩和减速后的运动传到转向横拉杆6,再传给固定于转向节3上的转向节臂5,使转向节和它所支承的转向轮偏转,从而改变了汽车的行驶方向。
这里,转向横拉杆和转向节臂属于转向传动机构。
二.转向操纵机构转向操纵机构由方向盘、转向轴、转向管柱等组成,它的作用是将驾驶员转动转向盘的操纵力传给转向器。
三.机械转向器齿轮齿条式转向器齿轮齿条式转向器分两端输出式和中间(或单端)输出式两种。
1.转向横拉杆2.防尘套3.球头座4.转向齿条5.转向器壳体6.调整螺塞7.压紧弹簧8.锁紧螺母9.压块10.万向节11.转向齿轮轴12.向心球轴承13.滚针轴承两端输出的齿轮齿条式转向器如图d-zx-5所示,作为传动副主动件的转向齿轮轴11通过轴承12和13安装在转向器壳体5中,其上端通过花键与万向节*10和转向轴连接。
与转向齿轮啮合的转向齿条4水平布置,两端通过球头座3与转向横拉杆1相连。
弹簧7通过压块9将齿条压*在齿轮上,保证无间隙啮合。
弹簧的预紧力可用调整螺塞6调整。
当转动转向盘时,转向器齿轮11转动,使与之啮合的齿条4沿轴向移动,从而使左右横拉杆带动转向节左右转动,使转向车轮偏转,从而实现汽车转向。
中间输出的齿轮齿条式转向器如图d-zx-6所示,其结构及工作原理与两端输出的齿轮齿条式转向器基本相同,不同之处在于它在转向齿条的中部用螺栓6与左右转向横拉杆7相连。
在单端输出的齿轮齿条式转向器上,齿条的一端通过内外托架与转向横拉杆相连。
(d-zx-6)1.万向节*2.转向齿轮轴3.调整螺母4.向心球轴承5.滚针轴承6.固定螺栓7.转向横拉杆8.转向器壳体9.防尘套10.转向齿条11.调整螺塞12.锁紧螺母13.压紧弹簧14.压块循环球式转向器循环球式转向器是目前国内外应用最广泛的结构型式之一,一般有两级传动副,第一级是螺杆螺母传动副,第二级是齿条齿扇传动副。
汽车转向机构设计方案1.1课程设计目的和任务机械原理课程设计能够培养机械类专业学生创新能力,是学生综合运用机械原理课程所学理论知识和技能解决实际问题,获得工程技术训练的必不可少的实践性教学环节。
机械原理课程设计教学所要达到的目的是:1、培养学生理论联系实际的设计思想,训练学生综合运用机械原理课程的理论知识,并结合生产实际来分析和解决工程问题的能力。
2、通过制定设计方案、合理选择机构的类型、正确地对机构的运动和受力进行分析和计算,让学生对机构设计有一个较完整的概念。
3、训练学生收集和运用设计资料以及计算、制图和数据处理及误差分析的能力,并在此基础上利用计算机基础理论知识,初步掌握编制计算机程序并在计算机上计算来解决机构设计问题的基本技能。
机械原理课程设计教学的任务是:机械原理课程设计通常选择一般用途的机构为题目,根据已知机械的工作要求,对机构进行选型与组合,设计出几种机构方案,并对其加以比较和确定,然后对所选定方案中的机构进行运动和动力分析,确定出最优的机构参数,绘制机构运动性能曲线。
1.2课程设计容和基本要求机械原理课程设计是在机械原理课程完成后集中进行的教学环节,它是在教师指导下由学生独立完成的。
每个学生都应明确课程设计的任务和要求,拟定设计计划,保证设计进度、设计质量,按时完成课程。
在设计过程中,提倡独立思考、深入钻研,主动地、创造性地进行设计工作。
要求设计态度严肃认真、一丝不苟,反对不求甚解,这样才能确保课程设计达到教学基本要求,并在设计思想、方法和技能等方面得到良好的训练和提高。
1)机械原理课程设计步骤(1)机构运动方案设计。
即根据给定的原始数据和工艺要求,构思并选定机构方案;(2)设计上述各机构。
根据选定的方案采用各机构,如凸轮机构、连杆机构、齿轮机构、间歇运动机构及其组合机构等,即具体机构的尺度综合,求出机构的主要尺寸;(3)根据上面求得的尺寸,按比例画出全部机构的运动简图及运动循环图;(4)据此对上述机构进行运动分析,并进行基于ADAMS软件的机构建模与运动仿真。
一.机械转向系统l.转向盘2.安全转向轴3.转向节4.转向轮5.转向节臂6.转向横拉杆7.转向减振器8.机械转向器上图是一种机械式转向系统。
驾驶员对转向盘1施加的转向力矩通过转向轴2输入转向器8。
从转向盘到转向传动轴这一系列零件即属于转向操纵机构。
作为减速传动装置的转向器中有1、2级减速传动副(右图所示转向系统中的转向器为单级减速传动副)。
经转向器放大后的力矩和减速后的运动传到转向横拉杆6,再传给固定于转向节3上的转向节臂5,使转向节和它所支承的转向轮偏转,从而改变了汽车的行驶方向。
这里,转向横拉杆和转向节臂属于转向传动机构。
二.转向操纵机构转向操纵机构由方向盘、转向轴、转向管柱等组成,它的作用是将驾驶员转动转向盘的操纵力传给转向器。
三.机械转向器齿轮齿条式转向器齿轮齿条式转向器分两端输出式和中间(或单端)输出式两种。
1.转向横拉杆2.防尘套3.球头座4.转向齿条5.转向器壳体6.调整螺塞7.压紧弹簧8.锁紧螺母9.压块10.万向节11.转向齿轮轴12.向心球轴承13.滚针轴承两端输出的齿轮齿条式转向器如图d-zx-5所示,作为传动副主动件的转向齿轮轴11通过轴承12和13安装在转向器壳体5中,其上端通过花键和万向节*10和转向轴连接。
和转向齿轮啮合的转向齿条4水平布置,两端通过球头座3和转向横拉杆1相连。
弹簧7通过压块9将齿条压*在齿轮上,保证无间隙啮合。
弹簧的预紧力可用调整螺塞6调整。
当转动转向盘时,转向器齿轮11转动,使和之啮合的齿条4沿轴向移动,从而使左右横拉杆带动转向节左右转动,使转向车轮偏转,从而实现汽车转向。
中间输出的齿轮齿条式转向器如图d-zx-6所示,其结构及工作原理和两端输出的齿轮齿条式转向器基本相同,不同之处在于它在转向齿条的中部用螺栓6和左右转向横拉杆7相连。
在单端输出的齿轮齿条式转向器上,齿条的一端通过内外托架和转向横拉杆相连。
(d-zx-6)1.万向节*2.转向齿轮轴3.调整螺母4.向心球轴承5.滚针轴承6.固定螺栓7.转向横拉杆8.转向器壳体9.防尘套10.转向齿条11.调整螺塞12.锁紧螺母13.压紧弹簧14.压块循环球式转向器循环球式转向器是目前国内外使用最广泛的结构型式之一,一般有两级传动副,第一级是螺杆螺母传动副,第二级是齿条齿扇传动副。
第1章绪论主动转向系统保留了传统转向系统中的机械构件,包括转向盘、转向柱、齿轮齿条转向机以及转向横拉杆等。
其最大特点就是在转向盘和齿轮齿条转向机之间的转向柱上集成了一套双行星齿轮机构,用于向转向轮提供叠加转向角。
主动转向系统通过一组双行星齿轮机构实现了独立于驾驶员的转向叠加功能,完美地解决了低速时转向灵活轻便与高速时保持方向稳定性的矛盾,并在此基础上通过转向干预来防止极限工况下车辆转向过多的趋势,进一步提高了车辆的稳定性。
同时,该系统能方便地与其他动力学控制系统进行集成控制,为今后汽车底盘一体化控制奠定了良好的基础。
与常规转向系统的显著差别在于,主动转向系统不仅能够对转向力矩进行调节,而且还可以对转向角度进行调整,使其与当前的车速达到完美匹配。
其中的总转角等于驾驶员转向盘转角和伺服电机转角之和。
低速时,伺服电机驱动的行星架转动方向与转向盘转动相同,叠加后增加了实际的转向角度,可以减少转向力的需求。
高速时,伺服电机驱动的行星架转动方向与转向盘转动相反,叠加后减少了实际的转向角度,转向过程会变得更为间接,提高了汽车的稳定性和安全性。
1.1转向系统综述1、蜗杆曲柄销式转向器它是以蜗杆为主动件,曲柄销为从动件的转向器。
蜗杆具有梯形螺纹,手指状的锥形指销用轴承支承在曲柄上,曲柄与转向摇臂轴制成一体。
转向时,通过转向盘转动蜗杆、嵌于蜗杆螺旋槽中的锥形指销一边自转,一边绕转向摇臂轴做圆弧运动,从而带动曲柄和转向垂臂摆动,再通过转向传动机构使转向轮偏转。
这种转向器通常用于转向力较大的载货汽车上。
2、循环球式转向器循环球式:这种转向装置是由齿轮机构将来自转向盘的旋转力进行减速,使转向盘的旋转运动变为涡轮蜗杆的旋转运动,滚珠螺杆和螺母夹着钢球啮合,因而滚珠螺杆的旋转运动变为直线运动,螺母再与扇形齿轮啮合,直线运动再次变为旋转运动,使连杆臂摇动,连杆臂再使连动拉杆和横拉杆做直线运动,改变车轮的方向。
这是一种古典的机构,现代轿车已大多不再使用,但又被最新方式的助力转向装置所应用。
它的原理相当于利用了螺母与螺栓在旋转过程中产生的相对移动,而在螺纹与螺纹之间夹入了钢球以减小阻力,所有钢球在一个首尾相连的封闭的螺旋曲线内循环滚动,循环球式故而得名。
3、齿轮齿条式转向器它是一种最常见的转向器。
其基本结构是一对相互啮合的小齿轮和齿条。
转向轴带动小齿轮旋转时,齿条便做直线运动。
有时,靠齿条来直接带动横拉杆,就可使转向轮转向。
所以,这是一种最简单的转向器。
它的优点是结构简单,成本低廉,转向灵敏,体积小,可以直接带动横拉杆。
在汽车上得到广泛应用。
1.2主动转向系统特点自从汽车发明以来,驾驶转向的传动装置通常都是固定的,方向盘与前轮的转向角度比始终一成不变。
如果采用直接转向,驾驶者在过急弯时就不需要大幅转动方向盘,但是在高速行驶时,方向盘细微的动作都将会影响到行驶稳定性;反过来说,转向系统越是间接,车辆在高速公路上的行驶稳定性就越高,但是必须牺牲过弯时的操控性。
所以,传统的转向系统都必须在安全性与舒适性之间做出权衡。
而主动转向系统保留了传统转向系统中的机械构件,包括转向盘、转向柱、齿轮齿条转向机以及转向横拉杆等。
其最大特点就是在转向盘和齿轮齿条转向机之间的转向柱上集成了一套双行星齿轮机构,用于向转向轮提供叠加转向角。
主动转向系统通过一组双行星齿轮机构实现了独立于驾驶员的转向叠加功能,完美地解决了低速时转向灵活轻便与高速时保持方向稳定性的矛盾,并在此基础上通过转向干预来防止极限工况下车辆转向过多的趋势,进一步提高了车辆的稳定性。
同时,该系统能方便地与其他动力学控制系统进行集成控制,为今后汽车底盘一体化控制奠定了良好的基础。
主动转向系统的的双行星齿轮机构包括左右左右两副行星齿轮机构,公用一个行星架进行动力传递,左侧的主动太阳轮与转向盘相连,将转向盘上输入的转向角经由行星架传递给右侧的行星齿轮副,而右侧的行星齿轮具有两个转向舒服自由度,一个是行星架传递的转向盘转角,另一个是由伺服电机叠加转角输入。
右侧的太阳轮作为输出轴,其输出的转向角度是由转向盘转向角度与伺服电动驱动的行星架转动方向与转向盘相同,增加了后者的实际转向角度,高速时,伺服电动机电机驱动的行星架与转向盘转向相反,叠加后减少了实际的转向角度,转向过程变得更为间接,提高了汽车的稳定性和安全性。
转动车轮所用的力量,并不是由电动机决定,而是由独立的转向助力系统与传统的转向装置一同决定的。
主动式转向系统的其他组成部件还包括判定当前驾驶条件和驾驶者指令的独立控制单元和多个传感器。
主动转向系统的整体结构如图1-1所示:图1-1 主动转向系统表1-1 主动转向系统设计基础参数表参数名称具体参数值传动比静止状态10:1;高速状态20:1轮胎型号245/45 R17W轴距2890㎜风阻系数0.28整车装备质量 1673㎏承载质量 382㎏前后配重49.7%,50.3%最高时速 250㎞/h转向盘回转总圈数 3.5圈最小转弯直径11.5m转向盘直径379㎜1.3本章小结本章是对传统转向器及主动转向系统的综述,了解主动转向系统的发展现状和特点并确定参考数据。
为后面的设计奠定基础。
第2章 转向系统主要参数的确定2.1转向盘的直径转向盘的直径根据车型的大小可在380~550㎜的标准系列内选取。
取SW D =379mm 。
2.2转向盘回转的总圈数转向盘转动的总圈数与转向系的角传动比以及所要求的转向轮最大转角有关,对货车和轿车的转向盘转动总圈数有不同的要求。
不装动力转向的重型汽车的转向盘转动的总圈数一般不宜超过7圈,而对于轿车不应超过3.6圈[2]。
取3.5圈。
2.3转向系的效率转向系的效率0η由转向器的效率η和传动机构的效率η'决定,即ηηη'⋅=0 (2-1) 转向器的效率有正效率+η和逆效率-η两种。
正效率121P P P -=+η (2-2) 逆效率323P P P -=-η (2-3) 式中:1P ——作用在转向盘上的功率; 2P ——转向器中的摩擦功率; 3P ——作用在转向摇臂轴上的功率。
对于蜗杆类和螺杆类转向器,如果只考虑啮合副的摩擦损失,忽略轴承和其他地方的摩擦损失,其效率可以用下面的公式计算:()ρααη+=+00t a n t a n (2-4)()0t a n t a n αραη-=- (2-5)式中:0α——蜗杆或螺杆的导程角,==βα012°;ρ——摩擦角,f arctan =ρ;f ——摩擦系数,取f =0.04(查得淬火钢对淬火钢的摩擦副摩擦系数f =0.03~0.05,选取f =0.04); 则: ρ=arctan0.04()()04.0arctan 12tan 12tan tan tan 00+︒︒=+=+ ρααη=83.45﹪2.4转向系的传动比2.4.1转向时加在转向盘上的力为了使转向系操纵轻便,转向时加在转向盘上的切向力,对轿车不应大于150~200N 。
作用于方向盘上的手力h F h F =+ηw SW Ri D L M L 212 (2-6)式中: r M ——转向阻力矩;a ——主销偏移矩;可用下列公式来计算汽车在沥青或者混凝土路面上的原地转向阻力矩r MpG f M r 313==481680 N·mm 式中: f ——轮胎和路面间的滑动摩擦系数,一般取0.7; r M ——转向阻力矩,N·mm ;1G ——转向轴负荷,N ,gc m G 载=1;载m ——汽车的满载质量 载m =(1673+382) ㎏=2055㎏;c ——汽车的转向轴载荷分配系数,转向轴为前轴,前轴载荷分配系数为49.7﹪。
=1G 2055×9.8×49.7﹪=10213.35N p ——轮胎气压,MPa ;取2.5bar ,即0.255MPa 。
则:h F =+ηw SW Ri D L M L 212=162.1N式中:1L ——为转向摇臂长;2L ——为转向节臂长,现代汽车结构中,转向传动机构角传动比='w i 12L L ;比值大约在0.85~1.10之间,近似认为='w i 1;SW D ——为转向盘直径,SW D =379 mm ; w i ——为转向器角传动比, w i =18;+η——为转向器正效率, +η=83.45%;2.4.2小齿轮最大转矩静止状态下,主动转向控制器不工作,此时工作状况相当于传统齿轮齿条转向器,转向盘与齿轮刚性连接。
则齿轮转矩 1T =21h F ·w D =30.8 N·m 2.4.3转向系的角传动比转向系的角传动比sds d i ∆∆==φφω0 (2-7) 式中:φ∆——转向轴的转角增量,rad ;s ∆——齿条位移增量,mm ;对于定传动比的转向器,其角转动比可表示为:r r i 1220==ππω (2-8)式中:r ——齿轮分度圆的半径,21d r =; 1d ——齿轮分度圆的直径;102122d r r i ===ππω (2-9) 2.4.4转向器的角传动比乘用车的转向器的角传动比在17~25的范围内选取,一般传统齿轮齿条转向器角传动比为18,取ωi =18。
2.5 本章小结本章主要根据以选择的数据,确定基本的转向系统参数,其中包括转向盘的直径 转向盘回转的总圈数 转向系的效率,转向系的传动比。
第3章 齿轮齿条式转向器的设计计算3.1齿轮齿条结构的几何设计主动小齿轮采用斜齿圆柱小齿轮,采用变位齿轮。
法向模数n m 在2~3mm 之间取值,取2mm(GB/T1357—1987)。
齿数多在5~8之间取值,取1Z =6。
由于避免根切的最小齿数为min Z =17;主动齿轮Z <min Z 只能采用变位齿轮方案变位系数 min χ=minmin Z Z Z h a-*;*a h =1,则min χ=0.529。
齿轮螺旋角多在9°~15°之间取值,取β=12°。
压力角即法向齿形角取标准值=n α20°。
转向盘最大转角=ϕ21×1.75×360°=315°。
齿条齿数待定。
主动小齿轮选用15i r N C 6材料制造,硬度≥58HRC 。
齿条选用45钢制造,均采用淬火处理。
壳体为减轻质量采用铝合金压铸。
齿轮精度初选8级。
法向齿顶高系数取标准值=*an h 1。
法向顶隙系数取标准值=*n c 0.25。
3.2齿轮齿条设计及校核转向器内齿轮工作视为闭式传动失效形式主要为轮齿的折断,因此按弯曲强度设计,按接触强度校核。
1、选取齿轮材料及热处理对于汽车齿轮采用硬齿面设计,表面硬度均应≥56HRC ,主动小齿轮取60HRC ,淬火处理;齿条采用45钢,表面硬度取58HRC ,淬火]。