自动控制原理 第八章 习题解答
- 格式:ppt
- 大小:326.00 KB
- 文档页数:9

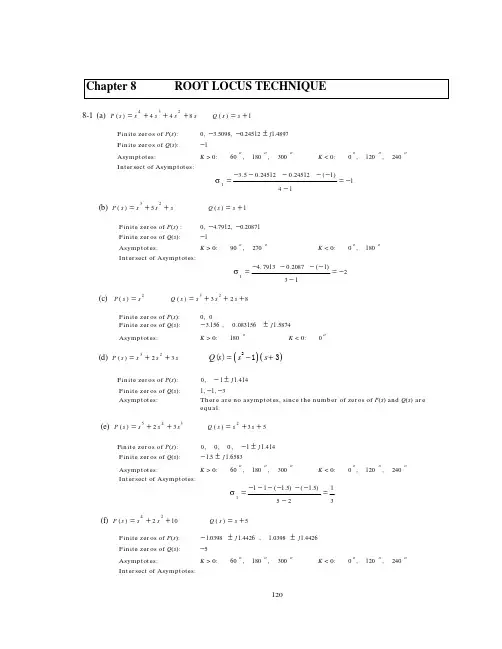
8-1求下列函数的z 变换。
(1) /()t T x t a = (2) 2()at x t t e -= (3) ()sin x t t t ω= (4) 2()1t x t e -=+ 解 (1) 查z 变换表得()zX z z a=- (2) 查z 变换表得223(1)() 2(1)T z z x t t z +=→-,由复数位移定理得223()() ()()aT aTataT T z z e e x t t eX z z e ----+=→=- (3) 查z 变换表得2sin ()sin ()2cos 1z Tx t t X z z z T ωωω=→=-+,由z 域微分定理得22222(sin sin 2sin cos 2sin )()sin ()()(2cos 1)d Tz z T T z T T z T y t t t Y z Tz X z dz z z T ωωωωωωω-++=→=-=-+ (4) 查z 变换表得222(21)()1(1)()T T T z z z z e X z z z e z z e -----=+=---- 8-2求下列函数的z 变换。
(1) 3()(1)(2)s X s s s +=++ (2) 21()s X s s+=(3) 1()(1)(2)X s s s s =++ (4) 21()(1)s e X s s s --=+ (1T s =)解 (1) 321()(1)(2)12s X s s s s s +==-++++,查z 变换表得22()T Tz zX z z e z e --=--- (2) 22111()s X s s s s+==+,查z 变换表得22(1)()(1)z z z X z z +-=-(3) 11/211/2()(1)(2)12X s s s s s s s ==-+++++,查z 变换表得 222()()2(1)()(1)()()2(1)()()T T T T T T z z e z e z z z e z z z e X z z z e z e -----------+--=---(4)121221()(1)(1)(1)(1)1(1)1(1)(1)T T T T TX z z Z s s Tz z zz z z z e T e z T e z e z e -------⎡⎤=-⎢⎥+⎣⎦⎡⎤=--+⎢⎥---⎣⎦-++-+=-++ 8-3 求下列函数的z 反变换。
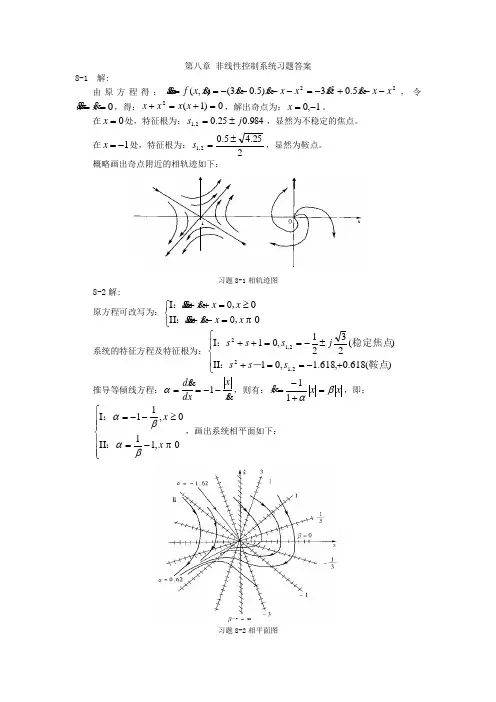
第八章 非线性控制系统习题答案8-1 解:由原方程得:2225.03)5.03(),(x x x x x x x x x x f x--+-=----== ,令0==x x,得:0)1(2=+=+x x x x ,解出奇点为:1,0-=x 。
在0=x 处,特征根为:984.025.02,1j s ±=,显然为不稳定的焦点。
在1-=x 处,特征根为:225.45.02,1±=s ,显然为鞍点。
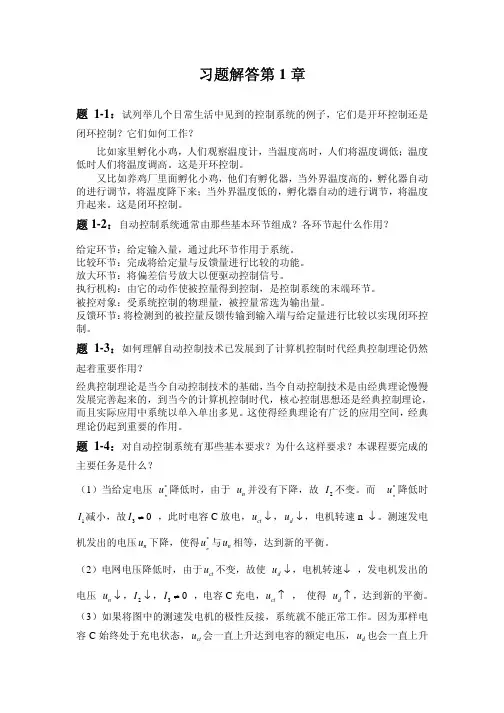
概略画出奇点附近的相轨迹如下:-1习题8-1相轨迹图8-2解:原方程可改写为:⎩⎨⎧=-+≥=++0II 0Ix x x x x x x x 0,:0,:系统的特征方程及特征根为:⎪⎩⎪⎨⎧+-==+±-==++)(618.0,618.1,01II )(2321,01I 2,122,12鞍点-:稳定焦点:s s s js s s 推导等倾线方程:xx dx xd --==1α,则有:x x xβα=+-=11 ,即: ⎪⎪⎩⎪⎪⎨⎧-=≥--=0,11II 0,11I x x βαβα::,画出系统相平面如下:习题8-2相平面图8-3 (1)解:相平面上任一点的相轨迹斜率为:x xxdxx dsin+-=,由=dxx d,得:),2,1,0(±±==kkxπ,因此在相平面的x轴上,),2,1,0(±±==kkxπ的点均为奇点。
在x轴上满足),2,1,0(2±±==kkxπ的所有奇点附近,由泰勒级数展开来验证这类奇点为稳定焦点。
在x轴上满足),2,1,0()12(±±=+=kkxπ的所有奇点附近,由泰勒级数展开来验证这类奇点为鞍点。
绘制相轨迹如下图所示:习题8-3(1)相轨迹图(2)解:原方程可改写为:⎩⎨⎧=-≥=+IIIxxxxxx0,:0,:系统的特征方程及特征根为:⎪⎩⎪⎨⎧±==±==+)(1,01II)(,01I2,122,12鞍点-:中心点:ssjss推导等倾线方程:⎪⎪⎩⎪⎪⎨⎧≥11xxxxxx,=,-=αα,画出系统相平面如下:习题8-3(2)相轨迹图(3)解:令0==xx,得0sin=x,得出系统的奇点:,2,,0ππ±±=x当,2,1,02±±==kx,κπ时,令2xx+=κπ,可以验证奇点,2,1,02±±==kx,κπ为中心点。

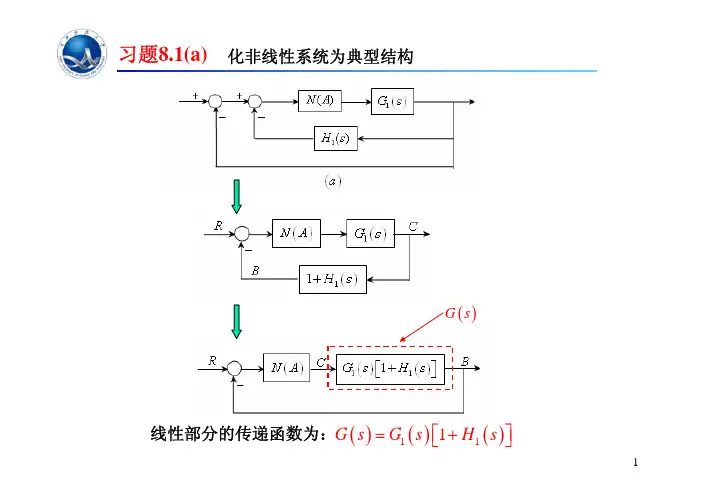
8-1已知非线性环节的特性如图8.1a 所示,试计算该环节的描述函数。
答:方法一:由图8.1a 所示,,0...............0...............⎩⎨⎧<->+=x A Kx x A Kx y 令代入则可以得到, 因为非线性特性为奇函数,所以=0,A 1=,B 1==在此处键入公式。
可以得到B 1=KX+4,所以该非线性环节的描述函数为 。
方法二:图8.1a 所示的非线性特性可以看作是图8.1b ,图8.1c 叠加而成的。
图8.1b 对应的非线性环节的描述函数为。
图8.1c 对应的为理想继电器非线性,其描述函数为。
所以,图8.1a 对应的飞线性特性描述函数为。
8.2.试绘制0=++x x x &&&非线性系统的相平面图。
答:y 0 -a a x k (a ) y 0 xk (b ) y(c )0 -aa x由题意,此方程可以改写为:,开关线为x=0。
当x>0时,相轨迹方程对应的特征方程为+λ+1=0,,由可以得到.故奇点为稳定的焦点。
当x<0时,相轨迹方程对应的特征方程为+λ-1=0,,由可以得到此时的奇点为(0,0),奇点为鞍点,推导等倾线方程。
令=α,可以得到等倾线方程为,令等倾线的斜率为k ,即可以得到,得到,列写表格如下表所示。
K -3 -2 -10 1 2 3 +∞,8.3.系统方框图如图8-29所示,其中K>0,T>0。
当非线性元件N分别为理想继电特性;死区继电特性;滞环继电特性;带死区和滞环的继电特性,在cc&-相平面上绘制相平面图。
8-29系统方框图(1)具有死区的三位置继电特性线性部分的微分方程为当继电特性为具有死区的三位置继电特性时,上式可以写成分段微分方程为:C(t)r = 0- )1(+TssKN(e)e)开关线为,两条开关将相平面划分为三个线性区域,下面分区绘制相轨迹在区域,相轨迹方程为:类似于具有饱和特性的非线性控制系统时的讨论,像平面与该区域无奇点,相轨迹均渐进于的直线。

第八章 线性系统的状态空间分析与综合习题及解答8-1 已知电枢控制的直流伺服电机的微分方程组及传递函数 b aaa a a E dtdi L i R U ++=+ ⑴设状态变量m m x θ=1,m x θ =2,θ =3x 及输出量m y θ=,试建立其动态方程; ⑵设状态变量m m a x x i x θθ ===321,,及 my θ=,试建立其动态方程。
解:(1)由题意可知: ⎪⎪⎩⎪⎪⎨⎧=======123121xy xx x x x m m mmθθθθ ,由已知 ⎪⎪⎩⎪⎪⎨⎧+===++=m m m m m a m mmb ba a a a a f J M i C M K E E i L i R U θθθ可推导出 ⎪⎪⎪⎩⎪⎪⎪⎨⎧=++-+-===12333221x y U J L C x J L C K f R x J L R J L f x x x x x a ma mm a m b m a m a a m a m 由上式,可列动态方程如下=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321x x x ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+-+-m a a m m a m a m b m a J L R J f L J L C K f R 0100010⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321x x x +⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡m a m J L C 00a U y =[]001⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321x x x(2)由题意可知:,1a i x =mm m y x x θθθ===,,32可推导出 ⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧==-=-====+--=+--==23133231111x y x J f x J C J f i J C x x x U L x L K x L R U L L K i L R i x m m m m m m m m a m m m m a aa b a a a a m a b a a a aθθθθθ可列动态方程如下由 ⎪⎩⎪⎨⎧===mm m x x x θθθ 321和 ⎪⎩⎪⎨⎧===mm a x x i x θθ 321得 ⎪⎪⎪⎩⎪⎪⎪⎨⎧-=-======3133221x J f x J C J f i J C x x x x x m m m m m m m a m m m m m θθθθ 由上式可得变换矩阵为 ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=m m mm J f J C T 0100018-2 设系统微分方程为 u y y yy 66116=+++ 。

习题答案88-1 1)二阶系统,2个状态变量。
设 2121212)(2)()( )()(x x t y t y t yx t y x x t y x --=--==⇒=== , []⎥⎦⎤⎢⎣⎡==⎥⎦⎤⎢⎣⎡--==00 01 2110 B y A A ,,,x x x 2)[]x x x 001 100322100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=y u 3)[]x x x 121 100321100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=y u 提示:本题利用了可控规范型与微分方程系数的关系。
8-2 1)23101)()(ss s U s Y += []x x x 001 1001000100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=y u 2)815611171181891)()(23+⋅++⋅-⋅=++=s s s s s s s U s Y []x x x 001 100980100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=y u 或 x x x ⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=5617181111800010000y u 3) []x x x 145 1006116100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=y u 提示:本题利用了状态空间的规范型与传递函数系数的关系。
8-38659122+++s s s8-4 ⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡+-+---==⎥⎦⎤⎢⎣⎡----------t t t t tt t t t t Att x t x e e 11e 2e e2e 2e e e e 2)0(e )()(222221x 8-5 ⎥⎦⎤⎢⎣⎡-+-+-=-==------t t t t s BU A sI t 3232113e 4e 1e e 21)]()[(L )()0(x 0x , 8-6 [])(120)( )(100)(321100010)1(k k y k u k k x x x =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=+ 或 [])(100)( )(120)(310201100)1(k k y k u k k x x x =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=+ 或 [])(001)( )(111)(321100010)1(k k y k u k k x x x =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=+ 提示:利用状态空间的规范型与差分方程系数的关系。
第一章习题答案1.自动控制:就是在人不直接参与的情况下,依靠外加装置或设备(称为控制装置或控制器),使机械、设备或生产过程(称为被控对象)的某个工作状态或参数(称为被控量)自动地按照预定的规律运行,或使某个被控制的参数按预定要求变化。
给定量:它是人们期望系统输出按照这种输入的要求而变化的控制量。
故一般又称给定输入或简称输入。
上例中的调节器的给定值u g 即是给定输入。
扰动量:它是一种人们所不希望的﹑影响系统输出使之偏离了给定作用的控制量。
上例中给水压力变化或蒸汽负荷变化都属于扰动。
开环控制:指控制装置与被控对象之间只有顺向作用而没有反向联系的控制过程,按这种方式组成的系统称为开环控制系统,其特点是系统的输出量不会对系统的输入量产生影响。
闭环控制:按照偏差进行控制的,其特点是不论什么原因使被控量偏离期望而出现偏差时,必定会产生一个相应的控制作用去减小或消除这个偏差,使被控量与期望值趋于一致。
复合控制:将闭环控制系统和开环控制系统结合在一起构成的开环-闭环相结合的控制系统,称为复合控制恒值控制:给定量是一定的,控制任务是保持被控量为一不变常数,在发生扰动时尽快地使被控量恢复为给定值。
随动控制:给定量是按照事先不知道的时间函数变化的,要求输出跟随给定量变化。
2.7. 自动控制系统的性能的要求:稳定性、快速性、准确性。
自动控制系统的性能的最基本要求:稳定性第二章习题答案1. (a) 22()()1()()d y t f dy t k y t t dt m dt m m++=F (b )1211212()()()()k k k dy t y t t dt f k k k k +=++F (c )42422()2()()dy t k dy t kt dt m dt m+=F2. (a) 22211221122122112()d u du dvR C R C R C R C R C u R C vdt dt dt ++++=+(b )233112211221232()d u duR C R C R C R C R C u dt dt++++2112211222()d v dvR C R C R C R C vdt dt=+++(c )222220.25 1.5d u du dv u v dt dt dt++=+3. (a)2111212()(1)()c r U s R R C s U s R R CR R s+=++(b )222222()21()31c r U s C R s RCs U s C R s RCs ++=++(c )2211212()()()c r U s R U s R LCs L R R C s R R =++++4. (a)21212121221212212121()1()()()1f f f fs s k k k k Y s f f f f f X s s s k k k k k +++=++++(b )21212112221212112212()()1()()1c r U s R R C C s R C R C s U s R R C C s R C R C R C s +++=++++5. 0.085d d i u ∆=6. r d h Sh Q dt ∆+=∆7.2232(),()432t ts G s g t e e s s --+==-++8. 2()142tty t ee e--=-+9.(a )21()()c r U s RU s R =-(b )112212()(1)(1)()c r U s R C s R C s U s R C s ++=-(c )212()()(1)c r U s R U s R R Cs =-+10.(1) ;012180,3,211k k k π︒==-=-(2) 略;(3)系统的闭环传递函数22301230123()11()1c M t Mr M MQ s k k k k T Q s s s k k k k k k k k k k =+++11.闭环传递函数32()0.7(6)()(0.90.7)(1.180.42)0.68c r Q s s Q s s K s K s +=+++++12.闭环传递函数12342363451234712348()()1G G G G C s R s G G G G G G G G G G G G G G G G =+++-13.传递函数,21221)()(T s T s s K K s R s C +++=2121)1()()(T s T s T s s s N s C ++-+=14.传递函数。

第八章 非线性控制系统分析练习题及答案8-2 设一阶非线性系统的微分方程为3x x x+-= 试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。
解 令 x=0 得 -+=-=-+=x x x x x x x 321110()()()系统平衡状态x e =-+011,,其中:0=e x :稳定的平衡状态;1,1+-=e x :不稳定平衡状态。
计算列表,画出相轨迹如图解8-1所示。
可见:当x ()01<时,系统最终收敛到稳定的平衡状态;当x ()01>时,系统发散;1)0(-<x 时,x t ()→-∞; 1)0(>x 时,x t ()→∞。
注:系统为一阶,故其相轨迹只有一条,不可能在整个 ~xx 平面上任意分布。
8-3 试确定下列方程的奇点及其类型,并用等倾斜线法绘制相平面图。
(1) x xx ++=0 (5) ⎩⎨⎧+=+=2122112x x xx x x解 (1) 系统方程为x -2 -1 -13 0 131 2x-6 0 0.385 0 -0.385 0 6 x 11 2 01 0211图解8-1 系统相轨迹⎩⎨⎧<=-+I I >=++I )0(0:)0(0:x x x x x x x x令0x x ==,得平衡点:0e x =。
系统特征方程及特征根:21,221,21:10,()2:10, 1.618,0.618()s s s s s s I II ⎧++==-±⎪⎨⎪+-==-+⎩稳定的焦点鞍点(, ) , , x f x x x x dxdxxx x dx dx x x x x x==--=--==--=-+=ααβ111⎪⎪⎩⎪⎪⎨⎧<-=>--=)0(11:II )0(11:I x x βαβα计算列表用等倾斜线法绘制系统相平面图如图解8-2(a )所示。
图解8-2(a )系统相平面图(5) xx x 112=+ ① 2122x x x+= ② 由式①: x xx 211=- ③ 式③代入②: ( )( )x xx x x 111112-=+- 即 x x x 11120--= ④ 令 x x110== 得平衡点: x e =0 由式④得特征方程及特征根为 ⎩⎨⎧-==--414.0414.20122,12λs s (鞍点) 画相轨迹,由④式x xdxdx x x x 1111112===+α xx 112=-α 计算列表用等倾斜线法绘制系统相平面图如图解8-2(b )所示。
自动控制原理(山东大学)山东大学智慧树知到答案2024年第一章测试1.下列家用电器哪个属于闭环控制?()A:洗衣机 B:冰箱 C:电子手表 D:电视机答案:B2.下列系统哪个属于闭环控制?()A:无人售货机 B:十字路口红绿灯系统 C:数控机床 D:空调答案:D3.开环控制方式简单,控制精度高。
A:错 B:对答案:A4.只要有反馈通道,一定是闭环控制。
A:对 B:错答案:A5.线性系统一定会满足叠加原理的。
A:对 B:错答案:A6.满足叠加原理的系统,一定是线性系统。
A:错 B:对答案:B7.复合控制方式是既有开环控制,又有闭环控制。
A:错 B:对答案:B8.电枢控制的直流电动机反馈控制系统是属于()。
A:恒值控制系统 B:离散控制系统 C:连续控制系统 D:线性定常系统答案:ACD9.雷达天线控制系统是属于()。
A:连续控制系统 B:恒值控制系统 C:随动控制系统 D:线性定常系统答案:ACD10.计算机控制系统是属于()。
A:程序控制系统 B:离散控制系统 C:非线性控制系统 D:线性控制系统答案:B第二章测试1.不同的物理系统,可以是同一种环节,同一个物理系统也可能成为不同的环节,这是与描述他们动态特性的微分方程相对应的。
A:错 B:对答案:B2.常见的典型环节有几种?A:4 B:5 C:7 D:6答案:D3.在线性定常系统中,系统输出的拉普拉斯变换与输入的拉普拉斯变换之比,称为系统的传递函数。
A:对 B:错答案:B4.物理系统线性微分方程一般表示形式中,方程左端导数阶次都输入的阶次。
A:高于 B:低于或等于 C:低于 D:高于或等于答案:D5.传递函数描述系统本身属性,与输入量的关系是:A:与输入量的大小无关,与输入量的类型有关。
B:与输入量的大小有关,与输入量的类型无关。
C:与输入量的大小和类型均有关 D:与输入量的大小和类型均无关答案:C6.传递函数表示成零极点表达式时,其中的传递系数又叫根轨迹增益。
自动控制原理知到章节测试答案智慧树2023年最新青岛理工大学绪论单元测试1.控制理论的主要任务是()参考答案:设计控制器;分析控制对象第一章测试1.下列属于自动控制系统的是()参考答案:飞机自动驾驶系统;由加热炉、热电偶、电桥、放大器、加热管实现炉温控制;马桶水箱内液位控制2.下列关于反馈控制系统,说法正确的是()参考答案:检测元件用于检测被控量;由被控对象和控制装置组成;控制器属于控制装置3.关于开环控制说法错误的是()参考答案:适合于控制精度要求高的场合4.负反馈调节器的控制作用能够减小偏差,正反馈则恰恰相反。
()参考答案:对5.恒值控制系统设计的重点是研究各种扰动对被控对象的影响以及抗扰动的措施。
()参考答案:对第二章测试1.下列关于特征根与固有模态的关系,正确的说法是()参考答案:虚轴上特征根对应的模态既不发散也不收敛;复特征根对应的模态是震荡的;实特征根对应单调指数模态;左半平面特征根对应的模态收敛2.关于线性系统的响应说法正确的是()参考答案:脉冲响应的积分就是阶跃响应;脉冲响应的laplace变换即为系统的传递函数;响应指系统在输入作用下,输出所时间变化的函数关系。
3.关于传递函数,正确的说法是()参考答案:分母多项式=0即为特征方程;是系统脉冲响应的laplace变换;由系统本身的结构参数决定;只适用于线性时不变系统;与微分方程同属于系统的数学描述方式4.关于传递函数极点,正确的说法是()参考答案:产生系统的固有运动;与输入信号无关;就是系统的特征根;个数等于系统的阶数5.关于传递函数零点,正确的说法是()参考答案:可以阻断系统的某些固有模态;影响系统模态在输出中的比重第三章测试1.关于线性系统稳定判据说法正确的是()参考答案:系统特性方程系数有变号则一定不稳定;系统所有闭环极点位于左半复平面则系统稳定2.劳斯表中出现全零行,说明存在关于原点对称的根,以下说法正确的是()参考答案:关于原点对称的根可求解系统特征方程得到;关于原点对称的根可求解辅助方程得到3.反应系统响应快速性的指标有()参考答案:峰值时间;延迟时间;上升时间;过渡过程时间4.上升时间的定义为()参考答案:输出首次达到其稳态10%到90%的时间;输出首次达到其稳态值的时间5.下列关于一阶系统说法正确的是()参考答案:由一阶微分方程描述;时间常数T体现系统的惯性,T越大反应越慢;阶跃响应不存在超调;输出达到0.932倍输出稳态值的时间为T第四章测试1.下述说法正确的是()参考答案:根轨迹方程就是系统的闭环特征方程。
第一章绪论1-1试比较开环控制系统和闭环控制系统的优缺点.解答:1开环系统(1)优点:结构简单,成本低,工作稳定。
用于系统输入信号及扰动作用能预先知道时,可得到满意的效果。
(2)缺点:不能自动调节被控量的偏差。
因此系统元器件参数变化,外来未知扰动存在时,控制精度差。
2 闭环系统⑴优点:不管由于干扰或由于系统本身结构参数变化所引起的被控量偏离给定值,都会产生控制作用去清除此偏差,所以控制精度较高。
它是一种按偏差调节的控制系统。
在实际中应用广泛。
⑵缺点:主要缺点是被控量可能出现波动,严重时系统无法工作。
1-2 什么叫反馈?为什么闭环控制系统常采用负反馈?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反馈。
闭环控制系统常采用负反馈。
由1-1中的描述的闭环系统的优点所证明。
例如,一个温度控制系统通过热电阻(或热电偶)检测出当前炉子的温度,再与温度值相比较,去控制加热系统,以达到设定值。
1-3 试判断下列微分方程所描述的系统属于何种类型(线性,非线性,定常,时变)?(1)22()()()234()56() d y t dy t du ty t u t dt dt dt++=+(2)()2() y t u t=+(3)()()2()4() dy t du tt y t u t dt dt+=+(4)()2()()sin dy ty t u t t dtω+=(5)22()()()2()3() d y t dy ty t y t u t dt dt++=(6)2()()2() dy ty t u t dt+=(7)()()2()35()du ty t u t u t dtdt=++⎰解答:(1)线性定常(2)非线性定常(3)线性时变(4)线性时变(5)非线性定常(6)非线性定常(7)线性定常1-4 如图1-4是水位自动控制系统的示意图,图中Q1,Q2分别为进水流量和出水流量。
控制的目的是保持水位为一定的高度。
第一章绪论重点:1.自动控制系统的工作原理;2.如何抽象实际控制系统的各个组成环节;3.反馈控制的基本概念;4.线性系统(线性定常系统、线性时变系统)非线性系统的定义和区别;5.自动控制理论的三个基本要求:稳定性、准确性和快速性。
第二章控制系统的数学模型重点:1.时域数学模型--微分方程;2.拉氏变换;3.复域数学模型--传递函数;4.建立环节传递函数的基本方法;5.控制系统的动态结构图与传递函数;6.动态结构图的运算规则及其等效变换;7.信号流图与梅逊公式。
难点与成因分析:1.建立物理对象的微分方程由于自动化专业的本科学生普遍缺乏对机械、热力、化工、冶金等过程的深入了解,面对这类对象建立微分方程是个难题,讲述时2.动态结构图的等效变换由于动态结构图的等效变换与简化普遍只总结了一般原则,而没有具体可操作的步骤,面对变化多端的结构图,初学者难于下手。
应引导学生明确等效简化的目的是解除反馈回路的交叉,理清结构图的层次。
如图1中右图所示系统存在复杂的交叉回路,若将a点移至b点,同时将c点移至d点,同理,另一条交叉支路也作类似的移动,得到右图的简化结构图。
图1 解除回路的交叉是简化结构图的目的3.梅逊公式的理解梅逊公式中前向通道的增益K P 、系统特征式∆及第K 条前向通路的余子式K ∆之间的关系仅靠文字讲述,难于理解清楚。
需要辅以变化的图形帮助理解。
如下图所示。
图中红线表示第一条前向通道,它与所有的回路皆接触,不存在不接触回路,故11=∆。
第二条前向通道与一个回路不接触,回路增益44H G L -=,故4421H G +=∆。
第三条前向通道与所有回路皆接触,故13=∆。
第三章 时域分析法重点:1. 一、二阶系统的模型典型化及其阶跃响应的特点;2. 二阶典型化系统的特征参数、极点位臵和动态性能三者间的相互关系;3. 二阶系统的动态性能指标(r t ,p t ,%σ,s t )计算方法;4. 改善系统动态性能的基本措施;5. 高阶系统主导极点的概念及高阶系统的工程分析方法;6. 控制系统稳定性的基本概念,线性定常系统稳定的充要条件;7. 劳斯判据判断系统的稳定性;8. 控制系统的误差与稳态误差的定义;9. 稳态误差与输入信号和系统类型之间的关系;10. 计算稳态误差的终值定理法和误差系数法;11. 减少或消除稳态误差的措施和方法。