自动控制原理第八章
- 格式:pptx
- 大小:2.16 MB
- 文档页数:48
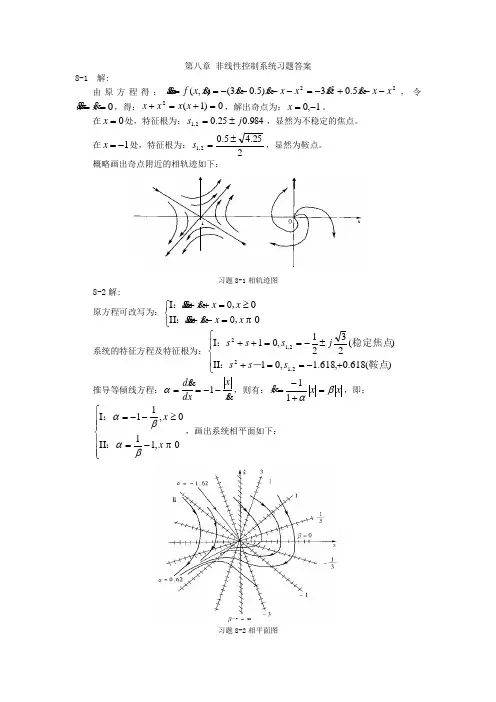
第八章 非线性控制系统习题答案8-1 解:由原方程得:2225.03)5.03(),(x x x x x x x x x x f x--+-=----== ,令0==x x,得:0)1(2=+=+x x x x ,解出奇点为:1,0-=x 。
在0=x 处,特征根为:984.025.02,1j s ±=,显然为不稳定的焦点。
在1-=x 处,特征根为:225.45.02,1±=s ,显然为鞍点。
概略画出奇点附近的相轨迹如下:-1习题8-1相轨迹图8-2解:原方程可改写为:⎩⎨⎧=-+≥=++0II 0Ix x x x x x x x 0,:0,:系统的特征方程及特征根为:⎪⎩⎪⎨⎧+-==+±-==++)(618.0,618.1,01II )(2321,01I 2,122,12鞍点-:稳定焦点:s s s js s s 推导等倾线方程:xx dx xd --==1α,则有:x x xβα=+-=11 ,即: ⎪⎪⎩⎪⎪⎨⎧-=≥--=0,11II 0,11I x x βαβα::,画出系统相平面如下:习题8-2相平面图8-3 (1)解:相平面上任一点的相轨迹斜率为:x xxdxx dsin+-=,由=dxx d,得:),2,1,0(±±==kkxπ,因此在相平面的x轴上,),2,1,0(±±==kkxπ的点均为奇点。
在x轴上满足),2,1,0(2±±==kkxπ的所有奇点附近,由泰勒级数展开来验证这类奇点为稳定焦点。
在x轴上满足),2,1,0()12(±±=+=kkxπ的所有奇点附近,由泰勒级数展开来验证这类奇点为鞍点。
绘制相轨迹如下图所示:习题8-3(1)相轨迹图(2)解:原方程可改写为:⎩⎨⎧=-≥=+IIIxxxxxx0,:0,:系统的特征方程及特征根为:⎪⎩⎪⎨⎧±==±==+)(1,01II)(,01I2,122,12鞍点-:中心点:ssjss推导等倾线方程:⎪⎪⎩⎪⎪⎨⎧≥11xxxxxx,=,-=αα,画出系统相平面如下:习题8-3(2)相轨迹图(3)解:令0==xx,得0sin=x,得出系统的奇点:,2,,0ππ±±=x当,2,1,02±±==kx,κπ时,令2xx+=κπ,可以验证奇点,2,1,02±±==kx,κπ为中心点。
第八章 非线性控制系统分析8-1 非线性控制系统概述1. 研究非线性控制理论的意义以上各章详细地讨论了线性定常控制系统的分析和设计问题。
但实际上,理想的线性系统并不存在,因为组成控制系统的各元件的动态和静态特性都存在着不同程度的非线性。
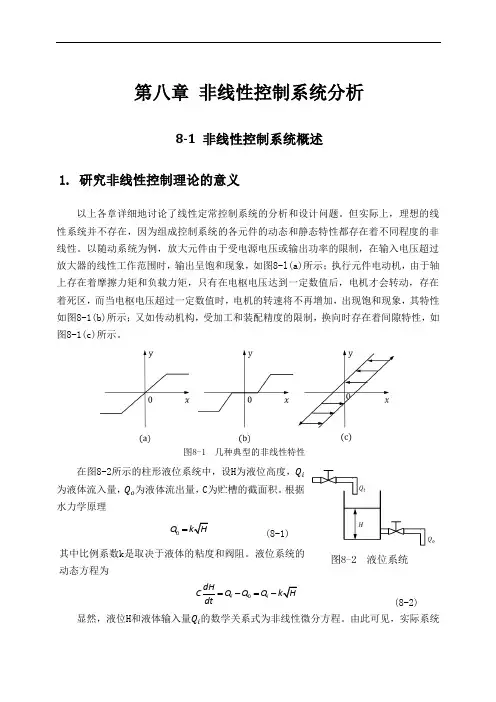
以随动系统为例,放大元件由于受电源电压或输出功率的限制,在输入电压超过放大器的线性工作范围时,输出呈饱和现象,如图8-l(a)所示;执行元件电动机,由于轴上存在着摩擦力矩和负载力矩,只有在电枢电压达到一定数值后,电机才会转动,存在着死区,而当电枢电压超过一定数值时,电机的转速将不再增加,出现饱和现象,其特性如图8-1(b)所示;又如传动机构,受加工和装配精度的限制,换向时存在着间隙特性,如图8-1(c)所示。
在图8-2所示的柱形液位系统中,设H 为液位高度,Q i为液体流入量,Q o 为液体流出量,C 为贮槽的截面积。
根据水力学原理0Q k H = (8-1)其中比例系数k 是取决于液体的粘度和阀阻。
液位系统的动态方程为0i i dH CQ Q Q k H dt =-=-显然,液位H 和液体输入量Q i 的数学关系式为非线性微分方程。
由此可见,实际系统中普遍存在非线性因素。
当系统中含有一个或多个具有非线性特性的元件时,该系统称为非线性系统。
一般地,非线性系统的数学模型可以表示为:(,,...,,)(,,...,,)n m n m d y dy d r dr f t y g t r dt dt dt dt =(8-3)其中f(·)和g(·)为非线性函数。
当非线性程度不严重时,例如不灵敏区较小、输入信号幅值较小、传动机构间隙不大时,可以忽略非线性特性的影响,从而可将非线性环节视为线性环节;当系统方程解析且工作在某一数值附近的较小范围内时,可运用小偏差法将非线性模型线性化。
例如,设图8—2液位系统的液位H 在H 0附近变化,相应的液体输入量Q i 在Q i0,附近变化时,可取ΔH =H −H 0,ΔQ i =Q i −Q i0,对√H 作泰勒级数展开。
8非线性控制系统前面几章讨论的均为线性系统的分析和设计方法,然而,对于非线性程度比较严重的系统,不满足小偏差线性化的条件,则只有用非线性系统理论进行分析。
本章主要讨论本质非线性系统,研究其基本特性和一般分析方法。
8.1非线性控制系统概述在物理世界中,理想的线性系统并不存在。
严格来讲,所有的控制系统都是非线性系统。
例如,由电子线路组成的放大元件,会在输出信号超过一定值后出现饱和现象。
当由电动机作为执行元件时,由于摩擦力矩和负载力矩的存在,只有在电枢电压达到一定值的时候,电动机才会转动,存在死区。
实际上,所有的物理元件都具有非线性特性。
如果一个控制系统包含一个或一个以上具有非线性特性的元件,则称这种系统为非线性系统,非线性系统的特性不能由微分方程来描述。
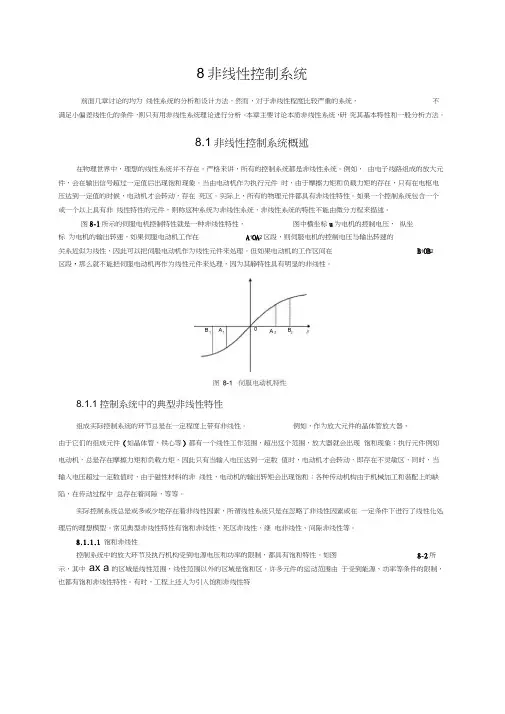
图8-1所示的伺服电机控制特性就是一种非线性特性,图中横坐标u为电机的控制电压,纵坐标为电机的输出转速,如果伺服电动机工作在A1OA2区段,则伺服电机的控制电压与输出转速的关系近似为线性,因此可以把伺服电动机作为线性元件来处理。
但如果电动机的工作区间在B1OB2区段•那么就不能把伺服电动机再作为线性元件来处理,因为其静特性具有明显的非线性。
8.1.1控制系统中的典型非线性特性组成实际控制系统的环节总是在一定程度上带有非线性。
例如,作为放大元件的晶体管放大器,由于它们的组成元件(如晶体管、铁心等)都有一个线性工作范围,超出这个范围,放大器就会出现饱和现象;执行元件例如电动机,总是存在摩擦力矩和负载力矩,因此只有当输入电压达到一定数值时,电动机才会转动,即存在不灵敏区,同时,当输入电压超过一定数值时,由于磁性材料的非线性,电动机的输出转矩会出现饱和;各种传动机构由于机械加工和装配上的缺陷,在传动过程中总存在着间隙,等等。
实际控制系统总是或多或少地存在着非线性因素,所谓线性系统只是在忽略了非线性因素或在一定条件下进行了线性化处理后的理想模型。
常见典型非线性特性有饱和非线性、死区非线性、继电非线性、间隙非线性等。
第八章非线性控制系统分析l、基本内容和要求(l)非线性系统的基本概念非线性系统的定义。
本质非线性和非本质非线性。
典型非线性特性。
非线性系统的特点。
两种分析非线性系统的方法——描述函数法和相平面法。
(2)谐波线性化与描述函数描述函数法是在一定条件下用频率特性分析非线性系统的一种近似方法。
谐波线性化的概念。
描述函数定义和求取方法。
描述函数法的适用条件。
(3)典型非线性特性的描述函数(4)用描述函数分析非线性系统非线性系统的一般结构。
借用奈氏判据的概念建立在奈氏图上判别非线性反馈系统稳定性的方法,非线性稳定的概念,稳定判据。
(5)相平面法的基本概念非线性系统的数学模型。
相平面法的概念和内容。
相轨迹的定义。
(6)绘制相轨迹的方法解析法求取相轨迹;作图法求取相轨迹。
(7)从相轨迹求取系统暂态响应相轨迹与暂态响应的关系,相轨迹上各点相应的时间求取方法。
(8)非线性系统的相平面分析以二阶系统为例说明相轨迹与系统性能间的关系,奇点和极限环的定义,它们与系统稳定性及响应的关系。
用相平面法分析非线性系统,非线性系统相轨迹的组成。
改变非线性特性的参量及线性部分的参量对系统稳定性的影响。
2、重点(l)非线性系统的特点(2)用描述函数和相轨迹分析非线性的性能,特别注重于非线性特性或线性部分对系统性能的影响。
8-1非线性控制系统分析1研究非线性控制理论的意义实际系统都具有程度不同的非线性特性,绝大多数系统在工作点附近,小范围工作时,都能作线性化处理。
应用线性系统控制理论,能够方便地分析和设计线性控制系统。
如果工作范围较大,或在工作点处不能线性化,系统为非线性系统。
线性系统控制理论不能很好地分析非线性系统。
因非线性特性千差万别,无统一普遍使用的处理方法。
非线性元件(环节):元件的输入输出不满足(比例+叠加)线性关系,而且在工作范围内不能作线性化处理(本质非线性)。
非线性系统:含有非线性环节的系统。
非线性系统的组成:本章讨论的非线性系统是,在控制回路中能够分为线性部分和非线性部分两部分串联的系统。

习题答案88-1 1)二阶系统,2个状态变量。
设 2121212)(2)()( )()(x x t y t y t yx t y x x t y x --=--==⇒=== , []⎥⎦⎤⎢⎣⎡==⎥⎦⎤⎢⎣⎡--==00 01 2110 B y A A ,,,x x x 2)[]x x x 001 100322100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=y u 3)[]x x x 121 100321100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=y u 提示:本题利用了可控规范型与微分方程系数的关系。
8-2 1)23101)()(ss s U s Y += []x x x 001 1001000100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=y u 2)815611171181891)()(23+⋅++⋅-⋅=++=s s s s s s s U s Y []x x x 001 100980100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=y u 或 x x x ⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=5617181111800010000y u 3) []x x x 145 1006116100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=y u 提示:本题利用了状态空间的规范型与传递函数系数的关系。
8-38659122+++s s s8-4 ⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡+-+---==⎥⎦⎤⎢⎣⎡----------t t t t tt t t t t Att x t x e e 11e 2e e2e 2e e e e 2)0(e )()(222221x 8-5 ⎥⎦⎤⎢⎣⎡-+-+-=-==------t t t t s BU A sI t 3232113e 4e 1e e 21)]()[(L )()0(x 0x , 8-6 [])(120)( )(100)(321100010)1(k k y k u k k x x x =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=+ 或 [])(100)( )(120)(310201100)1(k k y k u k k x x x =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=+ 或 [])(001)( )(111)(321100010)1(k k y k u k k x x x =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=+ 提示:利用状态空间的规范型与差分方程系数的关系。
第八章 非线性控制系统分析练习题及答案8-2 设一阶非线性系统的微分方程为3x x x+-= 试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。
解 令 x=0 得 -+=-=-+=x x x x x x x 321110()()()系统平衡状态x e =-+011,,其中:0=e x :稳定的平衡状态;1,1+-=e x :不稳定平衡状态。
计算列表,画出相轨迹如图解8-1所示。
可见:当x ()01<时,系统最终收敛到稳定的平衡状态;当x ()01>时,系统发散;1)0(-<x 时,x t ()→-∞; 1)0(>x 时,x t ()→∞。
注:系统为一阶,故其相轨迹只有一条,不可能在整个 ~xx 平面上任意分布。
8-3 试确定下列方程的奇点及其类型,并用等倾斜线法绘制相平面图。
(1) x xx ++=0 (5) ⎩⎨⎧+=+=2122112x x xx x x解 (1) 系统方程为x -2 -1 -13 0 131 2x-6 0 0.385 0 -0.385 0 6 x 11 2 01 0211图解8-1 系统相轨迹⎩⎨⎧<=-+I I >=++I )0(0:)0(0:x x x x x x x x令0x x ==,得平衡点:0e x =。
系统特征方程及特征根:21,221,21:10,()2:10, 1.618,0.618()s s s s s s I II ⎧++==-±⎪⎨⎪+-==-+⎩稳定的焦点鞍点(, ) , , x f x x x x dxdxxx x dx dx x x x x x==--=--==--=-+=ααβ111⎪⎪⎩⎪⎪⎨⎧<-=>--=)0(11:II )0(11:I x x βαβα计算列表用等倾斜线法绘制系统相平面图如图解8-2(a )所示。
图解8-2(a )系统相平面图(5) xx x 112=+ ① 2122x x x+= ② 由式①: x xx 211=- ③ 式③代入②: ( )( )x xx x x 111112-=+- 即 x x x 11120--= ④ 令 x x110== 得平衡点: x e =0 由式④得特征方程及特征根为 ⎩⎨⎧-==--414.0414.20122,12λs s (鞍点) 画相轨迹,由④式x xdxdx x x x 1111112===+α xx 112=-α 计算列表用等倾斜线法绘制系统相平面图如图解8-2(b )所示。