以及计算稳态误差的方法
- 格式:ppt
- 大小:3.76 MB
- 文档页数:70
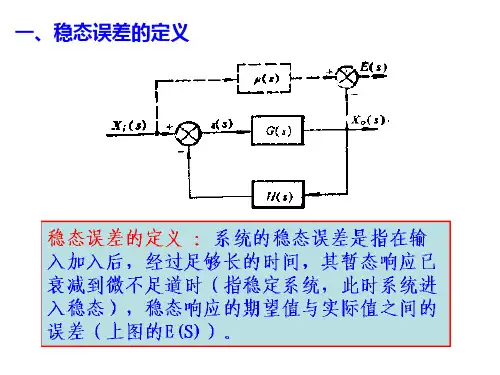
稳态误差计算稳态误差是指控制系统在稳定状态下输出与期望输出之间的差异。
在控制系统中,我们希望输出能够尽量接近期望输出,从而实现优化和准确的控制。
稳态误差的大小直接影响到控制系统的性能和精确度。
本文将介绍稳态误差的计算方法及其普通解法。
稳态误差的计算可以通过以下步骤进行:1.确定系统的开环传递函数系统的开环传递函数是控制系统的输入与输出之间的关系。
它描述了控制系统的动态特性。
通常,开环传递函数可以由系统的物理方程或实验数据拟合得出。
2.确定系统的期望输入信号期望输入信号是控制系统的期望输出值。
它可以是一个固定值或者一个随时间变化的函数。
期望输入信号决定了控制系统的目标。
3.计算系统的闭环传递函数闭环传递函数描述了控制系统的反馈路径对输出的影响。
它是开环传递函数与控制器传递函数的乘积。
4.计算系统的稳态误差在进行稳态误差计算之前,需要确定系统的类型。
根据系统是否包含积分环节,可以将系统分为4种类型:类型0系统、类型1系统、类型2系统和类型3系统。
-类型0系统:开环传递函数中不包含积分环节。
例如,开环传递函数为G(s)=K/(s+a)。
类型0系统的稳态误差可以通过输入信号的阶数来确定。
对于阶数为n的输入信号,稳态误差为0。
-类型1系统:开环传递函数中包含一个积分环节。
例如,开环传递函数为G(s)=K/(s*(s+a))。
类型1系统的稳态误差可以通过输入信号的阶数来确定。
对于阶数为n的输入信号,稳态误差为1/((n+1)*K)。
-类型2系统:开环传递函数中包含两个积分环节。
例如,开环传递函数为G(s)=K/(s^2*(s+a))。
类型2系统的稳态误差可以通过输入信号的阶数来确定。
对于阶数为n的输入信号,稳态误差为1/(n*K)。
-类型3系统:开环传递函数中包含三个积分环节。
例如,开环传递函数为G(s)=K/(s^3*(s+a))。
类型3系统的稳态误差可以通过输入信号的阶数来确定。
对于阶数为n的输入信号,稳态误差为1/((n-1)*K)。
单位负反馈控制系统稳态误差的计算公式摘要:一、引言二、单位负反馈控制系统介绍三、稳态误差的定义及计算公式四、静态误差系数法计算稳态误差五、应用实例与分析六、总结正文:一、引言在控制理论和工程领域中,单位负反馈控制系统被广泛应用于各种自动化领域。
对于此类控制系统,稳态误差的计算是非常重要的,可以帮助我们更好地理解和设计控制系统。
本文将详细介绍单位负反馈控制系统稳态误差的计算公式及其应用。
二、单位负反馈控制系统介绍单位负反馈控制系统是一种典型的闭环控制系统,其结构由输入、控制器、反馈环节和被控对象组成。
在这个系统中,控制器的输出是根据输入信号和反馈信号的差值来计算的,从而使系统的输出达到期望的稳态。
三、稳态误差的定义及计算公式稳态误差是指在系统稳定运行时,输出信号与期望信号之间的差异。
对于单位负反馈控制系统,其稳态误差可以通过以下公式计算:稳态误差= 静态误差系数* 放大器增益其中,静态误差系数是指在系统输入为单位阶跃信号时,输出信号的稳态值与输入信号的稳态值之比;放大器增益是指控制器输出信号与输入信号的比值。
四、静态误差系数法计算稳态误差静态误差系数法是一种常用的计算稳态误差的方法,其步骤如下:1.确定控制系统的输入和输出信号类型。
2.分析系统在单位阶跃信号输入下的响应,得出静态误差系数。
3.根据静态误差系数和放大器增益计算稳态误差。
五、应用实例与分析以一个简单的比例- 积分控制器为例,分析其稳态误差的计算过程:1.输入信号:单位阶跃信号2.输出信号:比例控制输出+ 积分控制输出3.静态误差系数:比例控制输出/ 输入信号= 1 + 积分时间常数/ 放大器增益4.稳态误差:静态误差系数* 放大器增益通过以上实例分析,可以得出在单位负反馈控制系统中,稳态误差的计算与系统的输入、输出信号类型,以及控制器参数密切相关。
六、总结本文详细介绍了单位负反馈控制系统稳态误差的计算公式及其应用。
通过静态误差系数法,可以方便地计算出系统的稳态误差,从而为控制系统的分析和设计提供依据。
已知闭环传递函数求稳态误差已知闭环传递函数求稳态误差引言:在控制工程中,闭环传递函数被广泛应用于描述控制系统的性能和稳定性。
稳态误差是评估控制系统性能的重要指标之一,它表示在稳定状态下系统输出与期望输出之间的偏差。
本文将详细探讨已知闭环传递函数的情况下如何求解稳态误差,以及其中的关键概念和方法。
一、稳态误差的定义和分类稳态误差是指在稳定状态下系统输出与期望输出之间的差异。
它通常用于评估控制系统对不同输入信号的跟踪能力。
稳态误差可以分为三类:零误差、有限非零误差和无穷大误差。
零误差表示系统能够完全跟踪期望输入信号,也即系统输出与期望输出完全一致。
有限非零误差表示系统输出与期望输出之间存在一定的差异,但这种差异是有限的,可以通过参数调整来减小。
无穷大误差表示系统无法跟踪期望输入信号,输出与期望输出之间的差异会趋于无穷大。
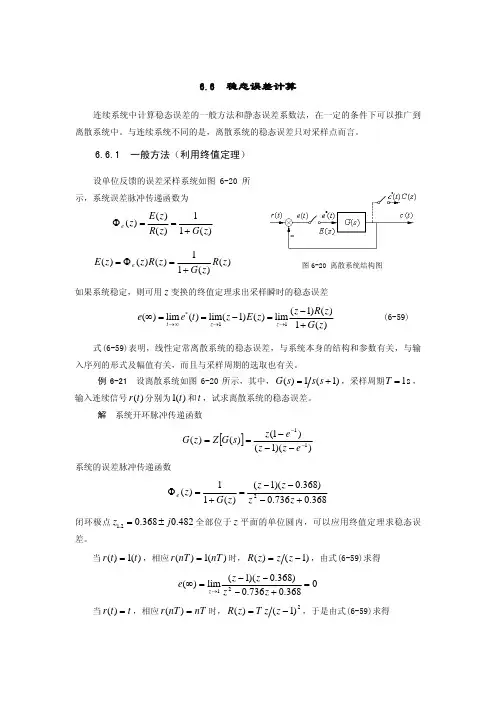
二、已知闭环传递函数求解稳态误差的方法已知闭环传递函数的情况下,我们可以使用不同的方法来求解稳态误差。
以下是常用的两种方法:1. 误差常数法误差常数法是一种基于稳态误差的定义和概念来求解稳态误差的方法。
对于单位阶跃输入信号(step function),我们可以通过计算系统输出的稳态值与期望输出的稳态值之间的差异,来求解稳态误差。
具体来说,我们可以将闭环传递函数表示为最简形式,即传递函数的分子次数小于或等于分母次数,然后根据其特性来求解稳态误差。
常见的误差常数包括静态误差常数、速度误差常数和加速度误差常数。
通过计算这些误差常数,我们可以得到稳态误差的近似解。
2. 根轨迹法根轨迹法是一种基于闭环传递函数的极点位置和稳态误差之间的关系来求解稳态误差的方法。
通过根轨迹的分析,我们可以确定系统极点的位置,从而评估系统的稳态误差。
一般来说,系统极点越接近原点,稳态误差越小;系统极点越远离原点,稳态误差越大。
通过绘制根轨迹图,并结合稳态误差定义,我们可以准确地求解稳态误差。
三、个人观点和理解在控制工程中,求解稳态误差是非常重要的,它直接关系到控制系统的性能和稳定性。